
Red Hat Ansible Automation Platform 자동화 메시 가이드
이 가이드에서는 Ansible Automation Platform 환경의 일부로 자동화 메시를 배포하는 데 사용되는 정보를 제공합니다.
초록
머리말
Red Hat Ansible Automation Platform에 관심을 가져 주셔서 감사합니다. Ansible Automation Platform은 Ansible 기반 환경에 제어, 지식 및 위임을 추가하여 팀이 복잡한 다중 계층 배포를 관리하는 데 도움이 되는 상용 서비스입니다.
이 가이드를 통해 Ansible Automation Platform 설치 후의 설치 요구 사항 및 프로세스를 이해하는 데 도움이 됩니다. 이 문서는 Ansible Automation Platform의 최신 릴리스에 대한 정보를 포함하도록 업데이트되었습니다.
보다 포괄적 수용을 위한 오픈 소스 용어 교체
Red Hat은 코드, 문서, 웹 속성에서 문제가 있는 용어를 교체하기 위해 최선을 다하고 있습니다. 먼저 마스터(master), 슬레이브(slave), 블랙리스트(blacklist), 화이트리스트(whitelist) 등 네 가지 용어를 교체하고 있습니다. 이러한 변경 작업은 작업 범위가 크므로 향후 여러 릴리스에 걸쳐 점차 구현할 예정입니다. 자세한 내용은 CTO Chris Wright의 메시지를 참조하십시오.
1장. Red Hat Ansible Automation Platform 환경에서 자동화 메시 계획
다음 항목에는 Ansible Automation Platform 환경에서 자동화 메시 배포를 계획하는 데 도움이 되는 정보가 포함되어 있습니다. 다음 섹션에서는 자동화 메시 토폴로지를 설계하는 방법에 대한 예를 제공하는 것 외에도 자동화 메시를 구성하는 개념에 대해 설명합니다. 자동화 메시를 배포할 수 있는 다양한 방법을 설명하기 위해 복잡한 토폴로지 예제가 포함되어 있습니다.
1.1. 자동화 메시 정보
자동화 메시는 기존 네트워크를 사용하여 서로 피어 간 연결을 설정하는 노드를 통해 대규모의 분산된 작업자 컬렉션에서 작업 분배를 용이하게하기위한 오버레이 네트워크입니다.
Red Hat Ansible Automation Platform 2는 Ansible Tower 및 격리된 노드를 자동화 컨트롤러 및 자동화 허브로 교체합니다. 자동화 컨트롤러는 UI, Restful API, RBAC, 워크플로 및 CI/CD 통합을 통해 자동화에 대한 컨트롤 플레인을 제공하는 반면 Automation Mesh는 제어 및 실행 계층을 구성하는 노드를 설정, 검색, 변경 또는 수정하는 데 사용할 수 있습니다.
자동화 메시가 도입되었습니다.
- 독립적으로 확장되므로 다운타임을 최소화하여 노드를 생성, 등록, 그룹 해제 및 등록할 수 있습니다.
- 컨트롤 플레인 용량과 별도로 플레이북 실행 용량을 확장할 수 있는 컨트롤 및 실행 플레인 분리입니다.
- 대기 시간에 탄력적이고, 중단 없이 재구성할 수 있으며, 중단이 발생할 때 다른 경로를 동적으로 다시 라우팅하는 배포 선택. 메시 라우팅이 변경됩니다.
- FIPS(Federal Information Processing Standards) 준수를 위한 양방향, 다중 연결 메시 통신 가능성이 포함됩니다.
1.2. 컨트롤 및 실행 플레인
자동화 메시는 고유한 노드 유형을 사용하여 컨트롤 및 실행 플레인을 모두 생성합니다. 자동화 메시 토폴로지를 설계하기 전에 컨트롤 및 실행 플레인 및 해당 노드 유형에 대해 자세히 알아보십시오.
1.2.1. 컨트롤 플레인
컨트롤 플레인 은 하이브리드 및 컨트롤 노드로 구성됩니다. 컨트롤 플레인의 인스턴스는 프로젝트 업데이트 및 관리 작업 외에도 웹 서버 및 작업 디스패치와 같은 영구 자동화 컨트롤러 서비스를 실행합니다.
-
하이브리드 노드 - 이는 프로젝트 업데이트, 관리 작업 및
ansible-runner작업 작업과 같은 컨트롤러 런타임 기능을 자동화하는 컨트롤 플레인 노드의 기본 노드 유형입니다. 하이브리드 노드는 자동화 실행에도 사용됩니다. - 제어 노드 - 제어 노드는 일반 작업이 아닌 프로젝트 및 인벤토리 업데이트 및 시스템 작업을 실행합니다. 이러한 노드에서 실행 기능이 비활성화됩니다.
1.2.2. 실행 플레인
실행 플레인은 컨트롤 플레인 을 대신하여 자동화를 실행하고 컨트롤 기능이 없는 실행 노드로 구성됩니다. 홉 노드는 통신할 수 있습니다. 실행 플레인 의 노드는 사용자 공간 작업만 실행하고 컨트롤 플레인에서 대기 시간이 길어지는 지리적으로 분리될 수 있습니다.
-
실행 노드 - 실행 노드는
podman격리를 사용하여ansible-runner에서 작업을 실행합니다. 이 노드 유형은 격리된 노드와 유사합니다. 이는 실행 플레인 노드의 기본 노드 유형입니다. - 홉 노드 - 건너뛰기 호스트와 유사하게 홉 노드는 트래픽을 다른 실행 노드로 라우팅합니다. 홉 노드는 자동화를 실행할 수 없습니다.
1.2.3. 피어
피어 연결은 노드 간 연결을 정의합니다. [automationcontroller] 및 [execution_nodes] 그룹 내에서 또는 [automationcontroller:vars] 또는 [execution_nodes:vars] 그룹을 사용하여 피어를 정의할 수 있습니다.
1.2.4. 자동화 메시 노드 유형 정의
이 섹션의 예제에서는 인벤토리 파일에 있는 호스트의 노드 유형을 설정하는 방법을 보여줍니다.
컨트롤 플레인 또는 실행 플레인 인벤토리 그룹에서 단일 노드의 node_type 을 설정할 수 있습니다. 전체 노드 그룹의 노드 유형을 정의하려면 그룹에 대해 vars 스탠자에서 node_type 을 설정합니다.
-
컨트롤 플레인
[automationcontroller]그룹에서node_type에 허용되는 값은하이브리드(기본값) 및제어입니다. -
[execution_nodes]그룹에서node_type에 허용되는 값은실행(기본값) 및홉입니다.
하이브리드 노드
다음 인벤토리는 컨트롤 플레인의 단일 하이브리드 노드로 구성됩니다.
[automationcontroller] control-plane-1.example.com
제어 노드
다음 인벤토리는 컨트롤 플레인의 단일 컨트롤 노드로 구성됩니다.
[automationcontroller] control-plane-1.example.com node_type=control
컨트롤 플레인 노드의 vars 스탠자에서 node_type 을 control로 설정하면 컨트롤 플레인의 모든 노드가 컨트롤 노드입니다.
[automationcontroller] control-plane-1.example.com [automationcontroller:vars] node_type=control
실행 노드
다음 스탠자는 실행 플레인에서 단일 실행 노드를 정의합니다.
[execution_nodes] execution-plane-1.example.com
홉 노드
다음 스탠자는 실행 플레인에서 단일 홉 노드와 실행 노드를 정의합니다. node_type 변수는 각 개별 노드에 대해 설정됩니다.
[execution_nodes] execution-plane-1.example.com node_type=hop execution-plane-2.example.com
그룹 수준에서 노드 유형을 설정하려면 실행 노드 및 홉 노드에 대해 별도의 그룹을 생성해야 합니다.
[execution_nodes] execution-plane-1.example.com execution-plane-2.example.com [execution_group] execution-plane-2.example.com [execution_group:vars] node_type=execution [hop_group] execution-plane-1.example.com [hop_group:vars] node_type=hop
피어 연결
peers= 호스트 변수를 사용하여 노드 간 연결을 생성합니다. 다음 예제에서는 control-plane-1.example.com 을 execution-node-1.example.com 에 연결하고 execution-node-1.example.com 을 execution-node-2.example.com 에 연결합니다.
[automationcontroller] control-plane-1.example.com peers=execution-node-1.example.com [automationcontroller:vars] node_type=control [execution_nodes] execution-node-1.example.com peers=execution-node-2.example.com execution-node-2.example.com
추가 리소스
- 메시 노드를 구현하는 방법에 대한 자세한 내용은 이 가이드의 자동화 메시 토폴로지 예제를 참조하십시오.
2장. 자동화 메시 설정
Ansible Automation Platform 설치 프로그램을 구성하여 Ansible 환경에 대한 자동화 메시를 설정합니다. 추가 작업을 수행하여 CA(인증 기관) 인증서 가져오기와 같은 설치를 사용자 지정합니다.
2.1. 자동화 메시 설치
Ansible Automation Platform 설치 프로그램을 사용하여 자동화 메시를 설정하거나 자동화 메시로 업그레이드합니다. Ansible Automation Platform에 메시 네트워크의 노드, 그룹 및 피어 관계에 대한 세부 정보를 제공하기 위해 설치 프로그램 번들의 인벤토리 파일에 정의합니다.
2.2. CA(인증 기관) 인증서 가져오기
CA(인증 기관)는 자동화 메시 환경에서 개별 노드 인증서를 확인하고 서명합니다. Red Hat Ansible Automation Platform 설치 프로그램의 인벤토리 파일에 인증서 경로 및 개인 RSA 키 파일을 지정하여 자체 CA를 제공할 수 있습니다.
Ansible Automation Platform 설치 프로그램은 CA를 제공하지 않는 경우 CA를 생성합니다.
절차
-
편집할
인벤토리파일을 엽니다. -
mesh_ca_keyfile변수를 추가하고 개인 RSA 키의 전체 경로(.key)를 지정합니다. -
mesh_ca_certfile변수를 추가하고 CA 인증서 파일(.crt)의 전체 경로를 지정합니다. - 인벤토리 파일에 변경 사항을 저장합니다.
예제
[all:vars] mesh_ca_keyfile=/tmp/<mesh_CA>.key mesh_ca_certfile=/tmp/<mesh_CA>.crt
인벤토리 파일에 CA 파일을 추가하고 설치 프로그램을 실행하여 CA를 적용합니다. 이 프로세스에서는 메시 네트워크의 각 제어 및 실행 노드의 /etc/receptor/tls/ca/ 디렉터리에 CA를 복사합니다.
3장. 자동화 메시 설계 패턴
이 섹션의 자동화 메시 토폴로지는 환경에서 메시 배포를 설계하는 데 사용할 수 있는 예를 제공합니다. 예로는 간단한 유해 노드 배포부터 여러 개의 실행 및 홉 노드를 사용하여 수많은 자동화 컨트롤러 인스턴스를 배포하는 복잡한 패턴에 이르기까지 다양한 범위가 있습니다.
사전 요구 사항
- 노드 유형 및 관련 개념 정보를 검토했습니다.
다음 예제에는 메시 토폴로지를 설명하는 이미지가 포함되어 있습니다. 이미지의 화살표는 피어링의 방향을 나타냅니다. 피어링이 설정된 후 노드 간 연결은 양방향 통신을 허용합니다.
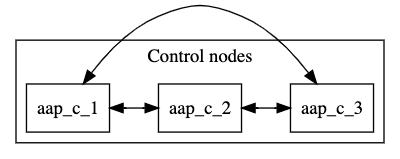
3.1. 여러 하이브리드 노드 인벤토리 파일 예
이 예제 인벤토리 파일은 여러 하이브리드 노드로 구성된 컨트롤 플레인을 배포합니다. 컨트롤 플레인의 노드는 자동으로 서로 피어링됩니다.
[automationcontroller] aap_c_1.example.com aap_c_2.example.com aap_c_3.example.com
다음 이미지는 이 메시 네트워크의 토폴로지를 표시합니다.
컨트롤 플레인 노드의 기본 node_type 은 하이브리드 입니다. 개별 노드의 node_type 을 [automationcontroller 그룹에서 hybrid 로 명시적으로 설정할 수 있습니다.
[automationcontroller] aap_c_1.example.com node_type=hybrid aap_c_2.example.com node_type=hybrid aap_c_3.example.com node_type=hybrid
또는 [automationcontroller] 그룹에 모든 노드의 노드 유형을 설정할 수 있습니다. 컨트롤 플레인에 새 노드를 추가하면 하이브리드 노드로 자동 설정됩니다.
[automationcontroller] aap_c_1.example.com aap_c_2.example.com aap_c_3.example.com [automationcontroller:vars] node_type=hybrid
나중에 컨트롤 플레인에 컨트롤 노드를 추가할 수 있다고 생각되면 하이브리드 노드의 별도의 그룹을 정의하고 그룹에 대한 노드 유형을 설정하는 것이 좋습니다.
[automationcontroller] aap_c_1.example.com aap_c_2.example.com aap_c_3.example.com [hybrid_group] aap_c_1.example.com aap_c_2.example.com aap_c_3.example.com [hybrid_group:vars] node_type=hybrid
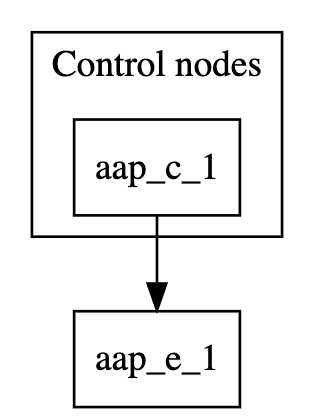
3.2. 단일 실행 노드가 있는 단일 노드 컨트롤 플레인
이 예제 인벤토리 파일은 단일 노드 컨트롤 플레인을 배포하고 실행 노드에 대한 피어 관계를 설정합니다.
[automationcontroller] aap_c_1.example.com [automationcontroller:vars] node_type=control peers=execution_nodes [execution_nodes] aap_e_1.example.com
다음 이미지는 이 메시 네트워크의 토폴로지를 표시합니다.
[automationcontroller] 스탠자는 제어 노드를 정의합니다. automationcontroller 그룹에 새 노드를 추가하면 aap_c_1.example.com 노드와 자동으로 피어링됩니다.
[automationcontroller:vars] 스탠자는 컨트롤 플레인의 모든 노드에 대해 노드 유형을 control 로 설정하고 노드가 실행 노드에 피어링하는 방법을 정의합니다.
-
execution_nodes그룹에 새 노드를 추가하면 컨트롤 플레인 노드가 자동으로 피어링됩니다. -
automationcontroller그룹에 새 노드를 추가하면 노드 유형이control으로 설정됩니다.
[execution_nodes] 스탠자는 인벤토리의 모든 실행 및 홉 노드를 나열합니다. 기본 노드 유형은 execution 입니다. 개별 노드의 노드 유형을 지정할 수 있습니다.
[execution_nodes] aap_e_1.example.com node_type=execution
또는 [execution_nodes] 그룹에 모든 실행 노드의 node_type을 설정할 수 있습니다. 그룹에 새 노드를 추가하면 실행 노드로 자동 설정됩니다.
[execution_nodes] aap_e_1.example.com [execution_nodes:vars] node_type=execution
나중에 인벤토리에 홉 노드를 추가하려면 실행 노드에 대한 별도의 그룹을 정의하고 그룹에 대해 node_type 을 설정하는 것이 좋습니다.
[execution_nodes] aap_e_1.example.com [local_execution_group] aap_e_1.example.com [local_execution_group:vars] node_type=execution
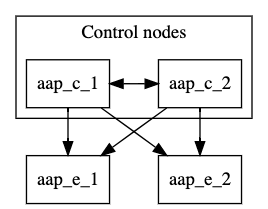
3.3. 최소 탄력적 구성
이 예제 인벤토리 파일은 두 개의 컨트롤 노드와 두 개의 실행 노드로 구성된 컨트롤 플레인을 배포합니다. 컨트롤 플레인의 모든 노드는 자동으로 서로 피어링됩니다. 컨트롤 플레인의 모든 노드는 execution_nodes 그룹의 모든 노드와 피어링됩니다. 모든 제어 노드에서 실행 노드에 연결할 수 있으므로 이 구성은 탄력적입니다.
용량 알고리즘은 작업이 시작될 때 선택한 제어 노드를 결정합니다. 자세한 내용은 자동화 컨트롤러 사용자 가이드의 자동화 컨트롤러 용량 제거 및 작업 영향 에서 참조하십시오.
다음 인벤토리 파일은 이 구성을 정의합니다.
[automationcontroller] aap_c_1.example.com aap_c_2.example.com [automationcontroller:vars] node_type=control peers=execution_nodes [execution_nodes] aap_e_1.example.com aap_e_1.example.com
[automationcontroller] 스탠자는 제어 노드를 정의합니다. 컨트롤 플레인의 모든 노드가 서로 피어링됩니다. automationcontroller 그룹에 새 노드를 추가하면 원래 노드와 자동으로 피어링됩니다.
[automationcontroller:vars] 스탠자는 컨트롤 플레인의 모든 노드에 대해 노드 유형을 control 로 설정하고 노드가 실행 노드에 피어링하는 방법을 정의합니다.
-
execution_nodes그룹에 새 노드를 추가하면 컨트롤 플레인 노드가 자동으로 피어링됩니다. -
automationcontroller그룹에 새 노드를 추가하면 노드 유형이control으로 설정됩니다.
다음 이미지는 이 메시 네트워크의 토폴로지를 표시합니다.
3.4. 분리된 로컬 및 원격 실행 구성
이 구성에서는 복구된 구성에 홉 노드와 원격 실행 노드를 추가합니다. 홉 노드에서 원격 실행 노드에 연결할 수 있습니다.
원격 위치에서 실행 노드를 설정하거나 DMZ 네트워크에서 자동화를 실행해야 하는 경우 이 설정을 사용할 수 있습니다.
[automationcontroller] aap_c_1.example.com aap_c_2.example.com [automationcontroller:vars] node_type=control peers=instance_group_local [execution_nodes] aap_e_1.example.com aap_e_2.example.com aap_h_1.example.com aap_e_3.example.com [instance_group_local] aap_e_1.example.com aap_e_2.example.com [hop] aap_h_1.example.com [hop:vars] peers=automationcontroller [instance_group_remote] aap_e_3.example.com [instance_group_remote:vars] peers=hop
다음 이미지는 이 메시 네트워크의 토폴로지를 표시합니다.
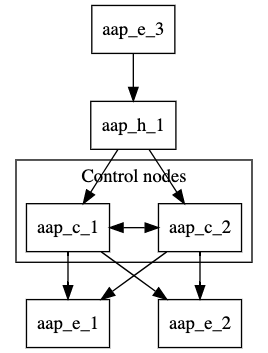
[automationcontroller:vars] 스탠자는 컨트롤 플레인의 모든 노드에 대한 노드 유형을 설정하고 컨트롤 노드가 로컬 실행 노드에 피어링하는 방법을 정의합니다.
- 컨트롤 플레인의 모든 노드는 자동으로 서로 피어링됩니다.
- 컨트롤 플레인의 모든 노드는 모든 로컬 실행 노드와 피어링됩니다.
노드 그룹 이름이 instance_group_ 로 시작하는 경우 설치 프로그램은 이를 인스턴스 그룹으로 인식하여 Ansible Automation Platform 사용자 인터페이스에 추가합니다.
3.5. 멀티 홉 (Multi-hopped) 실행 노드
이 구성에서 탄력적 컨트롤러 노드는 탄력적 로컬 실행 노드로 피어링됩니다. 탄력적인 로컬 홉 노드는 컨트롤러 노드와 피어링됩니다. 원격 실행 노드와 원격 홉 노드는 로컬 홉 노드와 피어링됩니다.
원격 네트워크의 DMZ 네트워크에서 자동화를 실행해야 하는 경우 이 설정을 사용할 수 있습니다.
[automationcontroller] aap_c_1.example.com aap_c_2.example.com aap_c_3.example.com [automationcontroller:vars] node_type=control peers=instance_group_local [execution_nodes] aap_e_1.example.com aap_e_2.example.com aap_e_3.example.com aap_e_4.example.com aap_h_1.example.com node_type=hop aap_h_2.example.com node_type=hop aap_h_3.example.com node_type=hop [instance_group_local] aap_e_1.example.com aap_e_2.example.com [instance_group_remote] aap_e_3.example.com [instance_group_remote:vars] peers=local_hop [instance_group_multi_hop_remote] aap_e_4.example.com [instance_group_multi_hop_remote:vars] peers=remote_multi_hop [local_hop] aap_h_1.example.com aap_h_2.example.com [local_hop:vars] peers=automationcontroller [remote_multi_hop] aap_h_3 peers=local_hop
다음 이미지는 이 메시 네트워크의 토폴로지를 표시합니다.
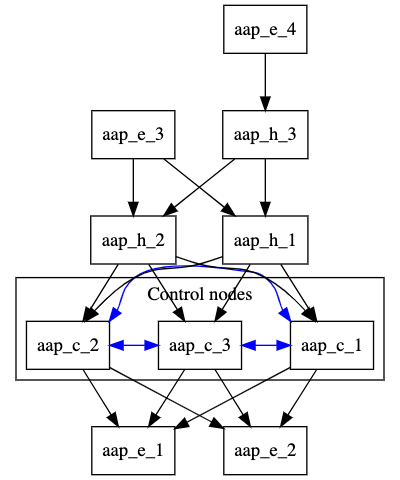
[automationcontroller:vars] 스탠자는 컨트롤 플레인의 모든 노드에 대한 노드 유형을 설정하고 컨트롤 노드가 로컬 실행 노드에 피어링하는 방법을 정의합니다.
- 컨트롤 플레인의 모든 노드는 자동으로 서로 피어링됩니다.
- 컨트롤 플레인의 모든 노드는 모든 로컬 실행 노드와 피어링됩니다.
[local_hop:vars] 스탠자는 [local_hop] 그룹의 모든 노드를 모든 제어 노드로 피어링합니다.
노드 그룹 이름이 instance_group_ 로 시작하는 경우 설치 프로그램은 이를 인스턴스 그룹으로 인식하여 Ansible Automation Platform 사용자 인터페이스에 추가합니다.
4장. 개별 노드 또는 그룹 프로비저닝 해제
Ansible Automation Platform 설치 프로그램을 사용하여 자동화 메시 노드 및 인스턴스 그룹 프로비저닝을 해제할 수 있습니다. 이 섹션의 절차에서는 각 프로세스의 인벤토리 파일 예를 사용하여 특정 노드 또는 전체 그룹을 프로비저닝 해제하는 방법을 설명합니다.
4.1. 설치 프로그램을 사용하여 개별 노드 프로비저닝 해제
Ansible Automation Platform 설치 프로그램을 사용하여 자동화 메시에서 노드 프로비저닝을 해제할 수 있습니다. 인벤토리 파일을 편집하여 노드를 프로비저닝 해제한 다음 설치 프로그램을 실행합니다. 설치 프로그램을 실행하면 모든 구성 파일과 노드에 연결된 로그도 제거됩니다.
[automationcontroller] 그룹에 지정된 첫 번째 호스트를 제외하고 인벤토리의 호스트를 프로비저닝 해제할 수 있습니다.
절차
-
프로비저닝 해제하려는 설치 프로그램 파일의 노드에
node_state=deprovision를 추가합니다.
예제
이 예제 인벤토리 파일은 자동화 메시 구성에서 두 노드를 프로비저닝합니다.
[automationcontroller] 126-addr.tatu.home ansible_host=192.168.111.126 node_type=control 121-addr.tatu.home ansible_host=192.168.111.121 node_type=hybrid routable_hostname=121-addr.tatu.home 115-addr.tatu.home ansible_host=192.168.111.115 node_type=hybrid node_state=deprovision [automationcontroller:vars] peers=connected_nodes [execution_nodes] 110-addr.tatu.home ansible_host=192.168.111.110 receptor_listener_port=8928 108-addr.tatu.home ansible_host=192.168.111.108 receptor_listener_port=29182 node_state=deprovision 100-addr.tatu.home ansible_host=192.168.111.100 peers=110-addr.tatu.home node_type=hop
4.1.1. 격리된 노드 프로비저닝 해제
awx-manage deprovisioning 유틸리티를 사용하여 분리된 노드를 수동으로 제거하는 옵션이 있습니다.
프로비저닝 해제 명령을 사용하여 실행 노드로 마이그레이션되지 않은 격리된 노드만 제거합니다. 자동화 메시 아키텍처에서 실행 노드를 프로비저닝 해제하려면 설치 프로그램 메서드 를 대신 사용합니다.
절차
인스턴스를 종료합니다.
$ automation-controller-service stop
다른 인스턴스에서 프로비저닝 해제 명령을 실행하여
host_name을 인벤토리 파일에 나열된 노드 이름으로 교체합니다.$ awx-manage deprovision_instance --hostname=<host_name>
4.2. 설치 프로그램을 사용하여 그룹 프로비저닝 해제
Ansible Automation Platform 설치 프로그램을 사용하여 자동화 메시에서 전체 그룹 프로비저닝을 해제할 수 있습니다. 설치 프로그램을 실행하면 모든 구성 파일과 해당 그룹의 노드에 연결된 로그가 제거됩니다.
[automationcontroller] 그룹에 지정된 첫 번째 호스트를 제외하고 인벤토리의 모든 호스트를 프로비저닝 해제할 수 있습니다.
절차
-
프로비저닝 해제하려는 그룹과 연결된 [group:vars]에
node_state=deprovision을 추가합니다.
예제
[execution_nodes] execution-node-1.example.com peers=execution-node-2.example.com execution-node-2.example.com peers=execution-node-3.example.com execution-node-3.example.com peers=execution-node-4.example.com execution-node-4.example.com peers=execution-node-5.example.com execution-node-5.example.com peers=execution-node-6.example.com execution-node-6.example.com peers=execution-node-7.example.com execution-node-7.example.com [execution_nodes:vars] node_state=deprovision
4.2.1. 격리된 인스턴스 그룹 프로비저닝 해제
awx-manage deprovisioning 유틸리티를 사용하여 분리된 인스턴스 그룹을 수동으로 제거하는 옵션이 있습니다.
프로비저닝 해제 명령을 사용하여 격리된 인스턴스 그룹만 제거합니다. 자동화 메시 아키텍처에서 인스턴스 그룹을 프로비저닝 해제하려면 설치 프로그램 메서드 를 대신 사용합니다.
절차
다음 명령을 실행하여 <
name>을 인스턴스 그룹 이름으로 교체합니다.$ awx-manage unregister_queue --queuename=<name>