3.3. 回復力のある最小設定
このサンプルインベントリーファイルは、2 つのコントロールノードと 2 つの実行ノードで設定されるコントロールプレーンをデプロイします。コントロールプレーン内のすべてのノードは、自動的に相互にピアリングされます。コントロールプレーンのすべてのノードは、execution_nodes グループのすべてのノードとピアリングされます。この設定は、すべての制御ノードから実行ノードに到達できるため、回復力があります。
容量アルゴリズムは、ジョブが開始されたときに選択される制御ノードを決定します。詳細はは、Automation Controller ユーザーガイド の Automation controller Capacity Determination and Job Impact を参照してください。
次のインベントリーファイルは、この設定を定義します。
[automationcontroller] aap_c_1.example.com aap_c_2.example.com [automationcontroller:vars] node_type=control peers=execution_nodes [execution_nodes] aap_e_1.example.com aap_e_1.example.com
[automationcontroller] スタンザは制御ノードを定義します。コントロールプレーン内のすべてのノードは、相互にピアリングされます。新しいノードを automationcontroller グループに追加すると、元のノードと自動的にピアリングされます。
[automationcontroller:vars] スタンザは、ノードタイプを control プレーン内のすべてのノードを制御するように設定し、ノードが実行ノードとどのようにピアリングするかを定義します。
-
execution_nodesグループに新しいノードを追加すると、コントロールプレーンノードは自動的にそれにピアリングします。 -
新しいノードを
AutomationControllerグループに追加すると、ノードタイプはcontrolに設定されます。
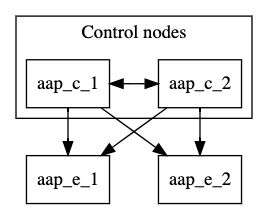
次の図は、このメッシュネットワークのトポロジーを示しています。