
Red Hat Training
A Red Hat training course is available for Red Hat Enterprise Linux
DM Multipath
Red Hat Enterprise Linux 7
Configuring and managing Device Mapper Multipath
Abstract
This book provides information on using the Device Mapper Multipath feature on Red Hat Enterprise Linux 7.
Chapter 1. Device Mapper Multipathing
Device mapper multipathing (DM Multipath) allows you to configure multiple I/O paths between server nodes and storage arrays into a single device. These I/O paths are physical SAN connections that can include separate cables, switches, and controllers. Multipathing aggregates the I/O paths, creating a new device that consists of the aggregated paths.
This chapter provides a summary of the features of DM-Multipath that were added subsequent to the initial release of Red Hat Enterprise Linux 7. Following that, this chapter provides a high level overview of DM Multipath and its components, as well as an overview of DM-Multipath setup.
1.1. New and Changed Features
This section lists features of the DM Multipath that are new since the initial release of Red Hat Enterprise Linux 7.
1.1.1. New and Changed Features for Red Hat Enterprise Linux 7.1
Red Hat Enterprise Linux 7.1 includes the following documentation and feature updates and changes.
- Table 5.1, “Useful
multipathCommand Options”. now includes entries for the -w and -W options of themultipathcommand, which allow you to better manage the wwids file. - Additional options for the
valuesargument of thefeaturesparameter in themultipath.conffile are documented in Chapter 4, The DM Multipath Configuration File. - Table 4.1, “Multipath Configuration Defaults”. includes an entry for the
force_syncparameter, which prevents path checkers from running in async mode when set to "yes".
In addition, small technical corrections and clarifications have been made throughout the document.
1.1.2. New and Changed Features for Red Hat Enterprise Linux 7.2
Red Hat Enterprise Linux 7.2 includes the following documentation and feature updates and changes.
- This document includes a new section, Section 5.1, “Automatic Configuration File Generation with Multipath Helper”. The Multipath Helper application gives you options to create multipath configurations with custom aliases, device blacklists, and settings for the characteristics of individual multipath devices.
- The
defaultssection of themultipath.confconfiguration file supports the newconfig_dir,new_bindings_in_boot,ignore_new_boot_devs,retrigger_tries, andretrigger_delaysparameters. Thedefaultssection of themultipath.conffile is documented in Table 4.1, “Multipath Configuration Defaults”. - The
defaults,devices, andmultipathssections of themultipath.confconfiguration file now support thedelay_watch_checksanddelay_wait_checksconfiguration parameters. For information on the configuration parameters, see Chapter 4, The DM Multipath Configuration File.
In addition, small technical corrections and clarifications have been made throughout the document.
1.1.3. New and Changed Features for Red Hat Enterprise Linux 7.3
Red Hat Enterprise Linux 7.3 includes the following documentation and feature updates and changes.
- The
multipathdcommand supports new format commands that show the status of multipath devices and paths in "raw" format versions. In raw format, no headers are printed and the fields are not padded to align the columns with the headers. Instead, the fields print exactly as specified in the format string. For information on themultipathdcommands, see Section 5.11, “The multipathd Commands”. - As of Red Hat Enterprise Linux 7.3, if you specify
prio "alua exclusive_pref_bit"in your device configuration, multipath will create a path group that contains only the path with theprefbit set and will give that path group the highest priority. For information on the configuration parameters, see Chapter 4, The DM Multipath Configuration File. - The
defaults,devices, andmultipathssections of themultipath.confconfiguration file now support theskip_kpartxconfiguration parameter. For information on the configuration parameters, see Chapter 4, The DM Multipath Configuration File.
In addition, small technical corrections and clarifications have been made throughout the document.
1.1.4. New and Changed Features for Red Hat Enterprise Linux 7.4
Red Hat Enterprise Linux 7.4 includes the following documentation and feature updates and changes.
- The
defaults,devices, andmultipathssections of themultipath.confconfiguration file support themax_sectors_kbconfiguration parameter. For information on the configuration parameters, see Chapter 4, The DM Multipath Configuration File. - The
defaultsanddevicessections of themultipath.confconfiguration file support thedetect_path_checkerconfiguration parameter. For information on the configuration parameters, see Chapter 4, The DM Multipath Configuration File. - The
defaultssection of themultipath.confconfiguration file supports theremove_retriesanddetect_path_checkerparameters. Thedefaultssection of themultipath.conffile is documented in Table 4.1, “Multipath Configuration Defaults”.
1.1.5. New and Changed Features for Red Hat Enterprise Linux 7.5
Red Hat Enterprise Linux 7.5 includes the following documentation and feature updates and changes.
- As of Red Hat Enterprise Linux 7.5, the
blacklistandblacklist_exceptionssection of themultipath.confconfiguration file support thepropertyparameter. For information on thepropertyparameter, see Section 4.2.6, “Blacklist Exceptions”. - the
defaultsandmultipathssections of themultipath.conffile now support a value offilefor thereservation_keyparameter. For information on the configuration parameters, see Chapter 4, The DM Multipath Configuration File. - The
defaultssection of themultipath.confconfiguration file supports theprkeys_fileparameter. Thedefaultssection of themultipath.conffile is documented in Table 4.1, “Multipath Configuration Defaults”.
1.1.6. New and Changed Features for Red Hat Enterprise Linux 7.6
Red Hat Enterprise Linux 7.6 includes the following documentation and feature updates and changes.
- As of Red Hat Enterprise Linux 7.6, you can specify the protocol for a device to be excluded from multipathing in the
blacklistsection of the configuration file with aprotocolsection. For information on blacklisting by device protocol, see Section 4.2.5, “Blacklisting By Device Protocol (Red Hat Enterprise Linux 7.6 and Later)”. - The
defaultsanddevicessections of themultipath.confconfiguration file support theall_tg_ptparameter. For information on the configuration parameters, see Chapter 4, The DM Multipath Configuration File.
1.2. Overview of DM Multipath
DM Multipath can be used to provide:
- RedundancyDM Multipath can provide failover in an active/passive configuration. In an active/passive configuration, only half the paths are used at any time for I/O. If any element of an I/O path (the cable, switch, or controller) fails, DM Multipath switches to an alternate path.
- Improved PerformanceDM Multipath can be configured in active/active mode, where I/O is spread over the paths in a round-robin fashion. In some configurations, DM Multipath can detect loading on the I/O paths and dynamically rebalance the load.
Figure 1.1, “Active/Passive Multipath Configuration with One RAID Device” shows an active/passive configuration with two I/O paths from the server to a RAID device. There are 2 HBAs on the server, 2 SAN switches, and 2 RAID controllers.
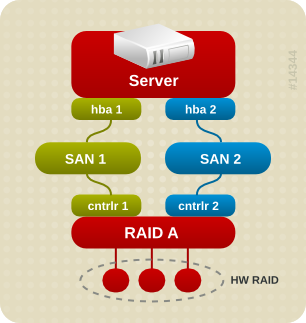
Figure 1.1. Active/Passive Multipath Configuration with One RAID Device
In this configuration, there is one I/O path that goes through hba1, SAN1, and controller 1 and a second I/O path that goes through hba2, SAN2, and controller2. There are many points of possible failure in this configuration:
- HBA failure
- FC cable failure
- SAN switch failure
- Array controller port failure
With DM Multipath configured, a failure at any of these points will cause DM Multipath to switch to the alternate I/O path.
Figure 1.2, “Active/Passive Multipath Configuration with Two RAID Devices” shows a more complex active/passive configuration with 2 HBAs on the server, 2 SAN switches, and 2 RAID devices with 2 RAID controllers each.
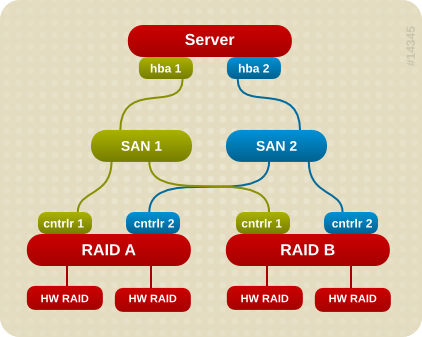
Figure 1.2. Active/Passive Multipath Configuration with Two RAID Devices
In the example shown in Figure 1.2, “Active/Passive Multipath Configuration with Two RAID Devices”, there are two I/O paths to each RAID device (just as there are in the example shown in Figure 1.1, “Active/Passive Multipath Configuration with One RAID Device”). With DM Multipath configured, a failure at any of the points of the I/O path to either of the RAID devices will cause DM Multipath to switch to the alternate I/O path for that device.
Figure 1.3, “Active/Active Multipath Configuration with One RAID Device” shows an active/active configuration with 2 HBAs on the server, 1 SAN switch, and 2 RAID controllers. There are four I/O paths from the server to a storage device:
- hba1 to controller1
- hba1 to controller2
- hba2 to controller1
- hba2 to controller2
In this configuration, I/O can be spread among those four paths.

Figure 1.3. Active/Active Multipath Configuration with One RAID Device
1.3. Storage Array Support
By default, DM Multipath includes support for the most common storage arrays that themselves support DM Multipath. For information on the default configuration values, including supported devices, run either of the following commands.
#multipathd show config#multipath -t
If your storage array supports DM Multipath and is not configured by default, you may need to add it to the DM Multipath configuration file,
multipath.conf. For information on the DM Multipath configuration file, see Chapter 4, The DM Multipath Configuration File.
Some storage arrays require special handling of I/O errors and path switching. These require separate hardware handler kernel modules.
1.4. DM Multipath Components
Table 1.1, “DM Multipath Components”. describes the components of DM Multipath.
Table 1.1. DM Multipath Components
| Component | Description |
|---|---|
dm_multipath kernel module | Reroutes I/O and supports failover for paths and path groups. |
mpathconf utility | Configures and enables device mapper multipathing. |
multipath command | Lists and configures multipath devices. Normally started with /etc/rc.sysinit, it can also be started by a udev program whenever a block device is added. |
multipathd daemon | Monitors paths; as paths fail and come back, it may initiate path group switches. Allows interactive changes to multipath devices. The daemon must be restarted following any changes to the /etc/multipath.conf file. |
kpartx command | Creates device mapper devices for the partitions on a device. It is necessary to use this command for DOS-based partitions with DM Multipath. The kpartx command is provided in its own package, but the device-mapper-multipath package depends on it. |
1.5. DM Multipath Setup Overview
DM Multipath includes compiled-in default settings that are suitable for common multipath configurations. The basic procedure for configuring your system with DM Multipath is as follows:
- Install the
device-mapper-multipathrpm. - Create the configuration file and enable multipathing with the
mpathconfcommand. You can also start the multipath daemon with this command if you do not need to edit the configuration file. - If necessary, edit the
multipath.confconfiguration file to modify default values and save the updated file. - Start the multipath daemon.
For detailed setup instructions for multipath configuration see Chapter 3, Setting Up DM Multipath.
Chapter 2. Multipath Devices
Without DM Multipath, each path from a server node to a storage controller is treated by the system as a separate device, even when the I/O path connects the same server node to the same storage controller. DM Multipath provides a way of organizing the I/O paths logically, by creating a single multipath device on top of the underlying devices.
2.1. Multipath Device Identifiers
Each multipath device has a World Wide Identifier (WWID), which is guaranteed to be globally unique and unchanging. By default, the name of a multipath device is set to its WWID. Alternately, you can set the
user_friendly_names option in the multipath configuration file, which sets the alias to a node-unique name of the form mpathn.
For example, a node with two HBAs attached to a storage controller with two ports by means of a single unzoned FC switch sees four devices:
/dev/sda, /dev/sdb, dev/sdc, and /dev/sdd. DM Multipath creates a single device with a unique WWID that reroutes I/O to those four underlying devices according to the multipath configuration. When the user_friendly_names configuration option is set to yes, the name of the multipath device is set to mpathn.
When new devices are brought under the control of DM Multipath, the new devices may be seen in two different places under the
/dev directory: /dev/mapper/mpathn and /dev/dm-n.
- The devices in
/dev/mapperare created early in the boot process. Use these devices to access the multipathed devices, for example when creating logical volumes. - Any devices of the form
/dev/dm-nare for internal use only should never be used by the administrator directly.
For information on the multipath configuration defaults, including the
user_friendly_names configuration option, see Section 4.3, “Configuration File Defaults”.
You can also set the name of a multipath device to a name of your choosing by using the
alias option in the multipaths section of the multipath configuration file. For information on the multipaths section of the multipath configuration file, see Section 4.4, “Multipaths Device Configuration Attributes”.
2.2. Consistent Multipath Device Names in a Cluster
When the
user_friendly_names configuration option is set to yes, the name of the multipath device is unique to a node, but it is not guaranteed to be the same on all nodes using the multipath device. Similarly, if you set the alias option for a device in the multipaths section of the multipath.conf configuration file, the name is not automatically consistent across all nodes in the cluster. This should not cause any difficulties if you use LVM to create logical devices from the multipath device, but if you require that your multipath device names be consistent in every node it is recommended that you not set the user_friendly_names option to yes and that you not configure aliases for the devices. By default, if you do not set user_friendly_names to yes or configure an alias for a device, a device name will be the WWID for the device, which is always the same.
If you want the system-defined user-friendly names to be consistent across all nodes in the cluster, however, you can follow this procedure:
- Set up all of the multipath devices on one machine.
- Disable all multipath devices on other machines by running the following commands:
#
systemctl stop multipathd.service#multipath -F - Copy the
/etc/multipath/bindingsfile from the first machine to all the other machines in the cluster. - Re-enable the
multipathddaemon on all the other machines in the cluster by running the following command:#
systemctl start multipathd.service
If you add a new device, you will need to repeat this process.
Similarly, if you configure an alias for a device that you would like to be consistent across the nodes in the cluster, you should ensure that the
/etc/multipath.conf file is the same for each node in the cluster by following the same procedure:
- Configure the aliases for the multipath devices in the
multipath.conffile on one machine. - Disable all multipath devices on other machines by running the following commands:
#
systemctl stop multipathd.service#multipath -F - Copy the
/etc/multipath.conffile from the first machine to all the other machines in the cluster. - Re-enable the
multipathddaemon on all the other machines in the cluster by running the following command:#
systemctl start multipathd.service
When you add a new device you will need to repeat this process.
2.3. Multipath Device Attributes
In addition to the
user_friendly_names and alias options, a multipath device has numerous attributes. You can modify these attributes for a specific multipath device by creating an entry for that device in the multipaths section of the multipath configuration file. For information on the multipaths section of the multipath configuration file, see Section 4.4, “Multipaths Device Configuration Attributes”.
2.4. Multipath Devices in Logical Volumes
After creating multipath devices, you can use the multipath device names just as you would use a physical device name when creating an LVM physical volume. For example, if
/dev/mapper/mpatha is the name of a multipath device, the following command will mark /dev/mapper/mpatha as a physical volume.
pvcreate /dev/mapper/mpatha
You can use the resulting LVM physical device when you create an LVM volume group just as you would use any other LVM physical device.
Note
If you attempt to create an LVM physical volume on a whole device on which you have configured partitions, the
pvcreate command will fail. Note that the Anaconda and Kickstart installation programs create empty partition tables if you do not specify otherwise for every block device. If you wish to use the whole device rather than a partition, you must remove the existing partitions from the device. You can remove existing partitions with the kpartx -d and the fdisk commands. If your system has block devices that are greater that 2Tb, you can use the parted command to remove partitions.
When you create an LVM logical volume that uses active/passive multipath arrays as the underlying physical devices, you should include filters in the
/etc/lvm/lvm.conf file to exclude the disks that underlie the multipath devices. This is because if the array automatically changes the active path to the passive path when it receives I/O, multipath will failover and failback whenever LVM scans the passive path if these devices are not filtered. For active/passive arrays that require a command to make the passive path active, LVM prints a warning message when this occurs.
To filter all SCSI devices in the LVM configuration file (
lvm.conf), include the following filter in the devices section of the file.
filter = [ "r/block/", "r/disk/", "r/sd.*/", "a/.*/" ]
Chapter 3. Setting Up DM Multipath
This chapter provides step-by-step example procedures for configuring DM Multipath. It includes the following procedures:
- Basic DM Multipath setup
- Ignoring local disks
- Adding more devices to the configuration file
- Starting multipath in the
initramfsfile system
3.1. Setting Up DM Multipath
Before setting up DM Multipath on your system, ensure that your system has been updated and includes the
device-mapper-multipath package.
You set up multipath with the
mpathconf utility, which creates the multipath configuration file /etc/multipath.conf.
- If the
/etc/multipath.conffile already exists, thempathconfutility will edit it. - If the
/etc/multipath.conffile does not exist, thempathconfutility will use the/usr/share/doc/device-mapper-multipath-0.4.9/multipath.conffile as the starting file. - If the
/usr/share/doc/device-mapper-multipath-0.4.9/multipath.conffile does not exist thempathconfutility will create the/etc/multipath.conffile from scratch.
For more information on the
mpathconf utility, see the mpathconf(8) man page.
If you do not need to edit the
/etc/multipath.conf file, you can set up DM Multipath for a basic failover configuration by running the following command. This command enables the multipath configuration file and starts the multipathd daemon.
# mpathconf --enable --with_multipathd y
If you need to edit the
/etc/multipath.conf file before starting the multipathd daemon. use the following procedure to set up DM Multipath for a basic failover configuration.
- Enter the
mpathconfcommand with the--enableoption specified:#
mpathconf --enableFor information on additional options to thempathconfcommand you may require, see thempathconfman page or enter thempathconfcommand with the--helpoption specified.#
mpathconf --helpusage: /sbin/mpathconf <command> Commands: Enable: --enable Disable: --disable Set user_friendly_names (Default y): --user_friendly_names <y|n> Set find_multipaths (Default y): --find_multipaths <y|n> Load the dm-multipath modules on enable (Default y): --with_module <y|n> start/stop/reload multipathd (Default n): --with_multipathd <y|n> - Edit the
/etc/multipath.conffile if necessary. The default settings for DM Multipath are compiled in to the system and do not need to be explicitly set in the/etc/multipath.conffile.The default value ofpath_grouping_policyis set tofailover, so in this example you do not need to edit the/etc/multipath.conffile. For information on changing the values in the configuration file to something other than the defaults, see Chapter 4, The DM Multipath Configuration File.The initial defaults section of the configuration file configures your system so that the names of the multipath devices are of the formmpathn; without this setting, the names of the multipath devices would be aliased to the WWID of the device. - Save the configuration file and exit the editor, if necessary.
- Execute the following command:
#
systemctl start multipathd.service
Since the value of
user_friendly_names is set to yes in the configuration file, the multipath devices will be created as /dev/mapper/mpathn. For information on setting the name of the device to an alias of your choosing, see Chapter 4, The DM Multipath Configuration File.
If you do not want to use user friendly names, you can enter the following command:
# mpathconf --enable --user_friendly_names nNote
If you find that you need to edit the multipath configuration file after you have started the multipath daemon, you must execute the
systemctl reload multipathd.service command for the changes to take effect.
3.2. Ignoring Local Disks when Generating Multipath Devices
Some machines have local SCSI cards for their internal disks. DM Multipath is not recommended for these devices. If you set the
find_multipaths configuration parameter to yes, you should not have to blacklist these devices. For information on the find_multipaths configuration parameter, see Section 4.3, “Configuration File Defaults”.
If you do not set the
find_multipaths configuration parameter to yes, can use the following procedure to modify the multipath configuration file to ignore the local disks when configuring multipath.
- Determine which disks are the internal disks and mark them as the ones to blacklist.In this example,
/dev/sdais the internal disk. Note that as originally configured in the default multipath configuration file, executing themultipath -v2command shows the local disk,/dev/sda, in the multipath map.This examples specifies the-doption of themultipathcommand to indicate that this is a dry run that will not create the multipath devices. For further information on themultipathcommand output, see Section 5.7, “Multipath Command Output”.#
multipath -v2 -d: SIBM-ESXSST336732LC____F3ET0EP0Q000072428BX1 undef WINSYS,SF2372 size=33 GB features="0" hwhandler="0" wp=undef `-+- policy='round-robin 0' prio=1 status=undef |- 0:0:0:0 sda 8:0 [--------- : 3600a0b80001327d80000006d43621677 undef WINSYS,SF2372 size=12G features='0' hwhandler='0' wp=undef `-+- policy='round-robin 0' prio=1 status=undef |- 2:0:0:0 sdb 8:16 undef ready running `- 3:0:0:0 sdf 8:80 undef ready running : 3600a0b80001327510000009a436215ec undef WINSYS,SF2372 size=12G features='0' hwhandler='0' wp=undef `-+- policy='round-robin 0' prio=1 status=undef |- 2:0:0:1 sdc 8:32 undef ready running `- 3:0:0:1 sdg 8:96 undef ready running : 3600a0b80001327d800000070436216b3 undef WINSYS,SF2372 size=12G features='0' hwhandler='0' wp=undef `-+- policy='round-robin 0' prio=1 status=undef |- 2:0:0:2 sdd 8:48 undef ready running `- 3:0:0:2 sdg 8:112 undef ready running : 3600a0b80001327510000009b4362163e undef WINSYS,SF2372 size=12G features='0' hwhandler='0' wp=undef `-+- policy='round-robin 0' prio=1 status=undef |- 2:0:0:3 sdd 8:64 undef ready running `- 3:0:0:3 sdg 8:128 undef ready running - In order to prevent the device mapper from mapping
/dev/sdain its multipath maps, edit the blacklist section of the/etc/multipath.conffile to include this device. Although you could blacklist thesdadevice using adevnodetype, that would not be a safe procedure since/dev/sdais not guaranteed to be the same on reboot. To blacklist individual devices, you can blacklist using the WWID of that device.Note that in the output to themultipath -v2command, the WWID of the/dev/sdadevice is SIBM-ESXSST336732LC____F3ET0EP0Q000072428BX1. To blacklist this device, include the following in the/etc/multipath.conffile.blacklist { wwid SIBM-ESXSST336732LC____F3ET0EP0Q000072428BX1 } - After you have updated the
/etc/multipath.conffile, you must manually tell themultipathddaemon to reload the file. The following command reloads the updated/etc/multipath.conffile.#
systemctl reload multipathd.service
3.3. Configuring Storage Devices
By default, DM Multipath includes support for the most common storage arrays that themselves support DM Multipath. For information on the default configuration value, including supported devices, run either of the following commands.
#multipathd show config#multipath -t
If you need to add a storage device that is not supported by default as a known multipath device, edit the
/etc/multipath.conf file and insert the appropriate device information.
For example, to add information about the HP Open-V series the entry looks like this. This example sets the device to queue for a minute (or 12 retries and 5 seconds per retry) after all paths have failed.
devices {
device {
vendor "HP"
product "OPEN-V"
no_path_retry 12
}
}
For more information on the
devices section of the configuration file, see Section 4.5, “Configuration File Devices”.
3.4. Setting Up Multipathing in the initramfs File System
You can set up multipathing in the
initramfs file system. After configuring multipath, you can rebuild the initramfs file system with the multipath configuration files by executing the dracut command with the following options:
# dracut --force --add multipath
If you run multipath from the
initramfs file system and you make any changes to the multipath configuration files, you must rebuild the initramfs file system for the changes to take effect.
Chapter 4. The DM Multipath Configuration File
By default, DM Multipath provides configuration values for the most common uses of multipathing. In addition, DM Multipath includes support for the most common storage arrays that themselves support DM Multipath. For information on the default configuration values, including supported devices, run either of the following commands.
#multipathd show config#multipath -t
You can override the default configuration values for DM Multipath by editing the
/etc/multipath.conf configuration file. If necessary, you can also add a storage array that is not supported by default to the configuration file.
Note
You can run set up multipathing in the
initramfs file system. If you run multipath from the initramfs file system and you make any changes to the multipath configuration files, you must rebuild the initramfs file system for the changes to take effect. For information on rebuilding the initramfs file system with multipath, see Section 3.4, “Setting Up Multipathing in the initramfs File System”.
This chapter provides information on parsing and modifying the
multipath.conf file. It contains sections on the following topics:
- Configuration file overview
- Configuration file blacklist
- Configuration file defaults
- Configuration file multipaths
- Configuration file devices
In the multipath configuration file, you need to specify only the sections that you need for your configuration, or that you wish to change from the default values. If there are sections of the file that are not relevant to your environment or for which you do not need to override the default values, you can leave them commented out, as they are in the initial file.
The configuration file allows regular expression description syntax.
Further information about the configuration file can be found on the
multipath.conf(5) man page.
4.1. Configuration File Overview
The multipath configuration file is divided into the following sections:
- blacklist
- Listing of specific devices that will not be considered for multipath.
- blacklist_exceptions
- Listing of multipath candidates that would otherwise be blacklisted according to the parameters of the blacklist section.
- defaults
- General default settings for DM Multipath.
- multipaths
- Settings for the characteristics of individual multipath devices. These values overwrite what is specified in the
defaultsanddevicessections of the configuration file. - devices
- Settings for the individual storage controllers. These values overwrite what is specified in the
defaultssection of the configuration file. If you are using a storage array that is not supported by default, you may need to create adevicessubsection for your array.
When the system determines the attributes of a multipath device, first it checks the multipath settings, then the devices settings, then the multipath system defaults.
4.2. Configuration File Blacklist
The
blacklist section of the multipath configuration file specifies the devices that will not be used when the system configures multipath devices. Devices that are blacklisted will not be grouped into a multipath device.
In older releases of Red Hat Enterprise Linux, multipath always tried to create a multipath device for every path that was not explicitly blacklisted. As of Red Hat Enterprise Linux 6, however, if the
find_multipaths configuration parameter is set to yes, then multipath will create a device only if one of three conditions are met:
- There are at least two paths that are not blacklisted with the same WWID.
- The user manually forces the creation of the device by specifying a device with the
multipathcommand. - A path has the same WWID as a multipath device that was previously created (even if that multipath device does not currently exist). Whenever a multipath device is created, multipath remembers the WWID of the device so that it will automatically create the device again as soon as it sees a path with that WWID. This allows you to have multipath automatically choose the correct paths to make into multipath devices, without have to edit the multipath blacklist.If you have previously created a multipath device without using the
find_multipathsparameter and then you later set the parameter toyes, you may need to remove the WWIDs of any device you do not want created as a multipath device from the/etc/multipath/wwidsfile. The following shows a sample/etc/multipath/wwidsfile. The WWIDs are enclosed by slashes (/):# Multipath wwids, Version : 1.0 # NOTE: This file is automatically maintained by multipath and multipathd. # You should not need to edit this file in normal circumstances. # # Valid WWIDs: /3600d0230000000000e13955cc3757802/ /3600d0230000000000e13955cc3757801/ /3600d0230000000000e13955cc3757800/ /3600d02300069c9ce09d41c31f29d4c00/ /SWINSYS SF2372 0E13955CC3757802/ /3600d0230000000000e13955cc3757803/
With the
find_multipaths parameter set to yes, you need to blacklist only the devices with multiple paths that you do not want to be multipathed. Because of this, it will generally not be necessary to blacklist devices.
If you do need to blacklist devices, you can do so according to the following criteria:
- By WWID, as described in Section 4.2.1, “Blacklisting by WWID”
- By device name, as described in Section 4.2.2, “Blacklisting By Device Name”
- By device type, as described in Section 4.2.3, “Blacklisting By Device Type”
- By
udevproperty, as described in Section 4.2.4, “Blacklisting By udev Property (Red Hat Enterprise Linux 7.5 and Later)” - By device protocol, as described in Section 4.2.5, “Blacklisting By Device Protocol (Red Hat Enterprise Linux 7.6 and Later)”
By default, a variety of device types are blacklisted, even after you comment out the initial blacklist section of the configuration file. For information, see Section 4.2.2, “Blacklisting By Device Name”.
4.2.1. Blacklisting by WWID
You can specify individual devices to blacklist by their World-Wide IDentification with a
wwid entry in the blacklist section of the configuration file.
The following example shows the lines in the configuration file that would blacklist a device with a WWID of 26353900f02796769.
blacklist {
wwid 26353900f02796769
}
4.2.2. Blacklisting By Device Name
You can blacklist device types by device name so that they will not be grouped into a multipath device by specifying a
devnode entry in the blacklist section of the configuration file.
The following example shows the lines in the configuration file that would blacklist all SCSI devices, since it blacklists all sd* devices.
blacklist {
devnode "^sd[a-z]"
}
You can use a
devnode entry in the blacklist section of the configuration file to specify individual devices to blacklist rather than all devices of a specific type. This is not recommended, however, since unless it is statically mapped by udev rules, there is no guarantee that a specific device will have the same name on reboot. For example, a device name could change from /dev/sda to /dev/sdb on reboot.
By default, the following
devnode entries are compiled in the default blacklist; the devices that these entries blacklist do not generally support DM Multipath. To enable multipathing on any of these devices, you would need to specify them in the blacklist_exceptions section of the configuration file, as described in Section 4.2.6, “Blacklist Exceptions”.
blacklist {
devnode "^(ram|raw|loop|fd|md|dm-|sr|scd|st)[0-9]*"
devnode "^(td|ha)d[a-z]"
}
4.2.3. Blacklisting By Device Type
You can specify specific device types in the
blacklist section of the configuration file with a device section. The following example blacklists all IBM DS4200 and HP devices.
blacklist {
device {
vendor "IBM"
product "3S42" #DS4200 Product 10
}
device {
vendor "HP"
product "*"
}
}
4.2.4. Blacklisting By udev Property (Red Hat Enterprise Linux 7.5 and Later)
The
blacklist and blacklist_exceptions sections of the multipath.conf configuration file support the property parameter. This parameter allows users to blacklist certain types of devices. The property parameter takes a regular expression string that is matched against the udev environment variable name for the device.
The following example blacklists all devices with the
udev property ID_ATA.
blacklist {
property "ID_ATA"
}
4.2.5. Blacklisting By Device Protocol (Red Hat Enterprise Linux 7.6 and Later)
You can specify the protocol for a device to be excluded from multipathing in the
blacklist section of the configuration file with a protocol section. The protocol strings that multipath recognizes are scsi:fcp, scsi:spi, scsi:ssa, scsi:sbp, scsi:srp, scsi:iscsi, scsi:sas, scsi:adt, scsi:ata, scsi:unspec, ccw, cciss, nvme, and undef. The protocol that a path is using can be viewed by running the command multipathd show paths format "%d %P".
The following example blacklists all devices with an undefined protocol or an unknown SCSI transport type.
blacklist {
protocol "scsi:unspec"
protocol "undef"
}
4.2.6. Blacklist Exceptions
You can use the
blacklist_exceptions section of the configuration file to enable multipathing on devices that have been blacklisted by default.
For example, if you have a large number of devices and want to multipath only one of them (with the WWID of 3600d0230000000000e13955cc3757803), instead of individually blacklisting each of the devices except the one you want, you could instead blacklist all of them, and then allow only the one you want by adding the following lines to the
/etc/multipath.conf file.
blacklist {
wwid "*"
}
blacklist_exceptions {
wwid "3600d0230000000000e13955cc3757803"
}
When specifying devices in the
blacklist_exceptions section of the configuration file, you must specify the exceptions in the same way they were specified in the blacklist. For example, a WWID exception will not apply to devices specified by a devnode blacklist entry, even if the blacklisted device is associated with that WWID. Similarly, devnode exceptions apply only to devnode entries, and device exceptions apply only to device entries.
The
property parameter works differently than the other blacklist_exception parameters. If the parameter is set, the device must have a udev variable that matches. Otherwise, the device is blacklisted. This parameter allows users to blacklist SCSI devices that multipath should ignore, such as USB sticks and local hard drives. To allow only SCSI devices that could reasonably be multipathed, set this parameter to SCSI_IDENT_|ID_WWN) as in the following example.
blacklist_exceptions {
property "(SCSI_IDENT_|ID_WWN)"
}
4.3. Configuration File Defaults
The
/etc/multipath.conf configuration file includes a defaults section that sets the user_friendly_names parameter to yes, as follows.
defaults {
user_friendly_names yes
}
This overwrites the default value of the
user_friendly_names parameter.
The configuration file includes a template of configuration defaults. This section is commented out, as follows.
#defaults {
# polling_interval 10
# path_selector "round-robin 0"
# path_grouping_policy multibus
# uid_attribute ID_SERIAL
# prio alua
# path_checker readsector0
# rr_min_io 100
# max_fds 8192
# rr_weight priorities
# failback immediate
# no_path_retry fail
# user_friendly_names yes
#}
To overwrite the default value for any of the configuration parameters, you can copy the relevant line from this template into the
defaults section and uncomment it. For example, to overwrite the path_grouping_policy parameter so that it is multibus rather than the default value of failover, copy the appropriate line from the template to the initial defaults section of the configuration file, and uncomment it, as follows.
defaults {
user_friendly_names yes
path_grouping_policy multibus
}
Table 4.1, “Multipath Configuration Defaults” describes the attributes that are set in the
defaults section of the multipath.conf configuration file. These values are used by DM Multipath unless they are overwritten by the attributes specified in the devices and multipaths sections of the multipath.conf file.
Table 4.1. Multipath Configuration Defaults
| Attribute | Description | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
polling_interval | Specifies the interval between two path checks in seconds. For properly functioning paths, the interval between checks will gradually increase to (4 * polling_interval). The default value is 5. | |||||||||
multipath_dir | The directory where the dynamic shared objects are stored. The default value is system dependent, commonly /lib/multipath. | |||||||||
find_multipaths |
| |||||||||
reassign_maps | Enable reassigning of device-mapper maps. With this option, The multipathd daemon will remap existing device-mapper maps to always point to the multipath device, not the underlying block devices. Possible values are yes and no. The default value is yes. | |||||||||
verbosity | The default verbosity. Higher values increase the verbosity level. Valid levels are between 0 and 6. The default value is 2. | |||||||||
path_selector |
| |||||||||
path_grouping_policy |
| |||||||||
prio |
| |||||||||
features |
| |||||||||
path_checker |
| |||||||||
failback |
| |||||||||
rr_min_io | Specifies the number of I/O requests to route to a path before switching to the next path in the current path group. This setting is only for systems running kernels older than 2.6.31. Newer systems should use rr_min_io_rq. The default value is 1000. | |||||||||
rr_min_io_rq | Specifies the number of I/O requests to route to a path before switching to the next path in the current path group, using request-based device-mapper-multipath. This setting should be used on systems running current kernels. On systems running kernels older than 2.6.31, use rr_min_io. The default value is 1. | |||||||||
rr_weight | If set to priorities, then instead of sending rr_min_io requests to a path before calling path_selector to choose the next path, the number of requests to send is determined by rr_min_io times the path's priority, as determined by the prio function. If set to uniform, all path weights are equal. The default value is uniform. | |||||||||
no_path_retry |
| |||||||||
user_friendly_names | If set to yes, specifies that the system should use the /etc/multipath/bindings file to assign a persistent and unique alias to the multipath, in the form of mpathn. If set to no, specifies that the system should use the WWID as the alias for the multipath. In either case, what is specified here will be overridden by any device-specific aliases you specify in the multipaths section of the configuration file. The default value is no. | |||||||||
queue_without_daemon | If set to no, the multipathd daemon will disable queuing for all devices when it is shut down. The default value is no. | |||||||||
flush_on_last_del | If set to yes, the multipathd daemon will disable queuing when the last path to a device has been deleted. The default value is no. | |||||||||
max_fds | Sets the maximum number of open file descriptors that can be opened by multipath and the multipathd daemon. This is equivalent to the ulimit -n command. As of the Red Hat Enterprise Linux 6.3 release, the default value is max, which sets this to the system limit from /proc/sys/fs/nr_open. For earlier releases, if this is not set the maximum number of open file descriptors is taken from the calling process; it is usually 1024. To be safe, this should be set to the maximum number of paths plus 32, if that number is greater than 1024. | |||||||||
checker_timeout | The timeout to use for prioritizers and path checkers that issue SCSI commands with an explicit timeout, in seconds. The default value is taken from sys/block/sdx/device/timeout. | |||||||||
fast_io_fail_tmo | The number of seconds the SCSI layer will wait after a problem has been detected on an FC remote port before failing I/O to devices on that remote port. This value should be smaller than the value of dev_loss_tmo. Setting this to off will disable the timeout. The default value is determined by the OS. The fast_io_fail_tmo option overrides the values of the recovery_tmo and replacement_timeout options. For details, see Section 4.6, “iSCSI and DM Multipath overrides”. | |||||||||
dev_loss_tmo | The number of seconds the SCSI layer will wait after a problem has been detected on an FC remote port before removing it from the system. Setting this to infinity will set this to 2147483647 seconds, or 68 years. The default value is determined by the OS. | |||||||||
hw_string_match |
| |||||||||
retain_attached_hw_handler | If this parameter is set to yes and the SCSI layer has already attached a hardware handler to the path device, multipath will not force the device to use the hardware_handler specified by the multipath.conf file. If the SCSI layer has not attached a hardware handler, multipath will continue to use its configured hardware handler as usual. The default value is no. | |||||||||
detect_prio | If this is set to yes, multipath will first check if the device supports ALUA, and if so it will automatically assign the device the alua prioritizer. If the device does not support ALUA, it will determine the prioritizer as it always does. The default value is no. | |||||||||
uid_attribute | Provides a unique path identifier. The default value is ID_SERIAL. | |||||||||
force_sync | (Red Hat Enterprise Linux Release 7.1 and later) If this is set to "yes", it prevents path checkers from running in async mode. This means that only one checker will run at a time. This is useful in the case where many multipathd checkers running in parallel causes significant CPU pressure. The default value is no. | |||||||||
delay_watch_checks | (Red Hat Enterprise Linux Release 7.2 and later) If set to a value greater than 0, the multipathd daemon will watch paths that have recently become valid for the specified number of checks. If they fail again while they are being watched, when they next become valid they will not be used until they have stayed up for the number of consecutive checks specified with delay_wait_checks. This allows you to keep paths that may be unreliable from immediately being put back into use as soon as they come back online. The default value is no. | |||||||||
delay_wait_checks | (Red Hat Enterprise Linux Release 7.2 and later) If set to a value greater than 0, when a device that has recently come back online fails again within the number of checks specified with delay_watch_checks, the next time it comes back online it will be marked and delayed and it will not be used until it has passed the number of checks specified in delay_wait_checks. The default value is no. | |||||||||
ignore_new_boot_devs | (Red Hat Enterprise Linux Release 7.2 and later) If set to yes, when the node is still in the initramfs file system during early boot, multipath will not create any devices whose WWIDs do not already exist in the initramfs copy of the /etc/multipath/wwids. This feature can be used for booting up during installation, when multipath would otherwise attempt to set itself up on devices that it did not claim when they first appeared by means of the udev rules. This parameter can be set to yes or no. If unset, it defaults to no. | |||||||||
retrigger_tries, retrigger_delay | (Red Hat Enterprise Linux Release 7.2 and later) The retrigger_tries and retrigger_delay parameters are used in conjunction to make multipathd retrigger uevents if udev failed to completely process the original ones, leaving the device unusable by multipath. The retrigger_tries parameter sets the number of times that multipath will try to retrigger a uevent if a device has not been completely set up. The retrigger_delay parameter sets the number of seconds between retries. Both of these options accept numbers greater than or equal to zero. Setting the retrigger_tries parameter to zero disables retries. Setting the retrigger_delay parameter to zero causes the uevent to be reissued on the next loop of the path checker. If the retrigger_tries parameter is unset, it defaults to 3. If the retrigger_delay parameter is unset, it defaults to 10. | |||||||||
new_bindings_in_boot | (Red Hat Enterprise Linux Release 7.2 and later) The new_bindings_in_boot parameter is used to keep multipath from giving out a user_friendly_name in the initramfs file system that was already given out by the bindings file in the regular file system, an issue that can arise since the user_friendly_names bindings in the initramfs file system get synced with the bindings in the regular file system only when the initramfs file system is remade. When this parameter is set to no multipath will not create any new bindings in the initramfs file system. If a device does not already have a binding in the initramfs copy of /etc/multipath/bindings, multipath will use its WWID as an alias instead of giving it a user_friendly_name. Later in boot, after the node has mounted the regular filesystem, multipath will give out a user_friendly_name to the device. This parameter can be set to yes or no. If unset, it defaults to no. | |||||||||
config_dir | (Red Hat Enterprise Linux Release 7.2 and later) If set to anything other than "", multipath will search this directory alphabetically for files ending in ".conf" and it will read configuration information from them, just as if the information were in the /etc/multipath.conf file. This allows you to have one main configuration that you share between machines in addition to a separate machine-specific configuration file or files. The config_dir parameter must either be "" or a fully qualified directory name. This parameter can be set only in the main /etc/multipath.conf file and not in one of the files specified in the config_dir file itself. The default value is /etc/multipath/conf.d. | |||||||||
deferred_remove | If set to yes, multipathd will do a deferred remove instead of a regular remove when the last path device has been deleted. This ensures that if a multipathed device is in use when a regular remove is performed and the remove fails, the device will automatically be removed when the last user closes the device. The default value is no. | |||||||||
log_checker_err | If set to once, multipathd logs the first path checker error at verbosity level 2. Any later errors are logged at verbosity level 3 until the device is restored. If it is set to always, multipathd always logs the path checker error at verbosity level 2. The default value is always. | |||||||||
skip_kpartx | (Red Hat Enterprise Linux Release 7.3 and later) If set to yes, kpartx will not automatically create partitions on the device. This allows users to create a multipath device without creating partitions, even if the device has a partition table. The default value of this option is no. | |||||||||
max_sectors_kb | (Red Hat Enterprise Linux Release 7.4 and later) Sets the max_sectors_kb device queue parameter to the specified value on all underlying paths of a multipath device before the multipath device is first activated. When a multipath device is created, the device inherits the max_sectors_kb value from the path devices. Manually raising this value for the multipath device or lowering this value for the path devices can cause multipath to create I/O operations larger than the path devices allow. Using the max_sectors_kb parameter is an easy way to set these values before a multipath device is created on top of the path devices and prevent invalid-sized I/O operations from being passed. If this parameter is not set by the user, the path devices have it set by their device driver, and the multipath device inherits it from the path devices. | |||||||||
remove_retries | (Red Hat Enterprise Linux Release 7.4 and later) Sets how may times multipath will retry removing a device that is in use. Between each attempt, multipath will sleep 1 second. The default value is 0, which means that multipath will not retry the remove. | |||||||||
disable_changed_wwids | (Red Hat Enterprise Linux Release 7.4 and later) If set to yes and the WWID of a path device changes while it is part of a multipath device, multipath will disable access to the path device until the WWID of the path is restored to the WWID of the multipath device. The default value is no, which does not check if a path's WWID has changed. | |||||||||
detect_path_checker | (Red Hat Enterprise Linux Release 7.4 and later) If set to yes, multipath will try to detect if the device supports ALUA. If so, the device will automatically use the tur path checker. If not, the path_checker will be selected as usual. The default value is no. | |||||||||
reservation_key |
| |||||||||
prkeys_file | (Red Hat Enterprise Linux Release 7.5 and later) The full path name of the prkeys file, which is used by the multipathd daemon to keep track of the reservation key used for a specific WWID when the reservation_key parameter is set to file. The default value is /etc/multipath/prkeys. | |||||||||
all_tg_pt | (Red Hat Enterprise Linux Release 7.6 and later) If this option is set to yes, when mpathpersist registers keys it will treat a key registered from one host to one target port as going from one host to all target ports. This must be set to yes to successfully use mpathpersist on arrays that automatically set and clear registration keys on all target ports from a host, instead of per target port per host. The default value is no. |
4.4. Multipaths Device Configuration Attributes
Table 4.2, “Multipath Attributes” shows the attributes that you can set in the
multipaths section of the multipath.conf configuration file for each specific multipath device. These attributes apply only to the one specified multipath. These defaults are used by DM Multipath and override attributes set in the defaults and devices sections of the multipath.conf file.
Table 4.2. Multipath Attributes
| Attribute | Description | ||||||||
|---|---|---|---|---|---|---|---|---|---|
wwid | Specifies the WWID of the multipath device to which the multipath attributes apply. This parameter is mandatory for this section of the multipath.conf file. | ||||||||
alias | Specifies the symbolic name for the multipath device to which the multipath attributes apply. If you are using user_friendly_names, do not set this value to mpathn; this may conflict with an automatically assigned user friendly name and give you incorrect device node names. | ||||||||
path_grouping_policy |
| ||||||||
path_selector |
| ||||||||
failback |
| ||||||||
prio |
| ||||||||
features |
| ||||||||
no_path_retry |
| ||||||||
rr_min_io | Specifies the number of I/O requests to route to a path before switching to the next path in the current path group. This setting is only for systems running kernels older that 2.6.31. Newer systems should use rr_min_io_rq. The default value is 1000. | ||||||||
rr_min_io_rq | Specifies the number of I/O requests to route to a path before switching to the next path in the current path group, using request-based device-mapper-multipath. This setting should be used on systems running current kernels. On systems running kernels older than 2.6.31, use rr_min_io. The default value is 1. | ||||||||
rr_weight | If set to priorities, then instead of sending rr_min_io requests to a path before calling path_selector to choose the next path, the number of requests to send is determined by rr_min_io times the path's priority, as determined by the prio function. If set to uniform, all path weights are equal. | ||||||||
flush_on_last_del | If set to yes, then multipath will disable queuing when the last path to a device has been deleted. | ||||||||
user_friendly_names | If set to yes, specifies that the system should use the /etc/multipath/bindings file to assign a persistent and unique alias to the multipath, in the form of mpathn. If set to no, specifies that the system should use use the WWID as the alias for the multipath. In either case, what is specified here will be overridden by any device-specific aliases you specify in the multipaths section of the configuration file. | ||||||||
delay_watch_checks | (Red Hat Enterprise Linux Release 7.2 and later) If set to a value greater than 0, the multipathd daemon will watch paths that have recently become valid for the specified number of checks. If they fail again while they are being watched, when they next become valid they will not be used until they have stayed up for the number of consecutive checks specified with delay_wait_checks. This allows you to keep paths that may be unreliable from immediately being put back into use as soon as they come back online. | ||||||||
delay_wait_checks | (Red Hat Enterprise Linux Release 7.2 and later) If set to a value greater than 0, when a device that has recently come back online fails again within the number of checks specified with delay_watch_checks, the next time it comes back online it will be marked and delayed and it will not be used until it has passed the number of checks specified in delay_wait_checks. | ||||||||
deferred_remove | If set to yes, multipathd will do a deferred remove instead of a regular remove when the last path device has been deleted. This ensures that if a multipathed device is in use when a regular remove is performed and the remove fails, the device will automatically be removed when the last user closes the device. | ||||||||
skip_kpartx | (Red Hat Enterprise Linux Release 7.3 and later) If set to yes, kpartx will not automatically create partitions on the device. This allows users to create a multipath device without creating partitions, even if the device has a partition table. | ||||||||
max_sectors_kb | (Red Hat Enterprise Linux Release 7.4 and later) Sets the max_sectors_kb device queue parameter to the specified value on all underlying paths of a multipath device before the multipath device is first activated. When a multipath device is created, the device inherits the max_sectors_kb value from the path devices. Manually raising this value for the multipath device or lowering this value for the path devices can cause multipath to create I/O operations larger than the path devices allow. Using the max_sectors_kb parameter is an easy way to set these values before a multipath device is created on top of the path devices and prevent invalid-sized I/O operations from being passed If this parameter is not set by the user, the path devices have it set by their device driver, and the multipath device inherits it from the path devices. | ||||||||
reservation_key |
|
The following example shows multipath attributes specified in the configuration file for two specific multipath devices. The first device has a WWID of
3600508b4000156d70001200000b0000 and a symbolic name of yellow.
The second multipath device in the example has a WWID of
1DEC_____321816758474 and a symbolic name of red. In this example, the rr_weight attributes is set to priorities.
multipaths {
multipath {
wwid 3600508b4000156d70001200000b0000
alias yellow
path_grouping_policy multibus
path_selector "round-robin 0"
failback manual
rr_weight priorities
no_path_retry 5
}
multipath {
wwid 1DEC_____321816758474
alias red
rr_weight priorities
}
}
4.5. Configuration File Devices
Table 4.3, “Device Attributes” shows the attributes that you can set for each individual storage device in the
devices section of the multipath.conf configuration file. These attributes are used by DM Multipath unless they are overwritten by the attributes specified in the multipaths section of the multipath.conf file for paths that contain the device. These attributes override the attributes set in the defaults section of the multipath.conf file.
Many devices that support multipathing are included by default in a multipath configuration. For information on the default configuration value, including supported devices, run either of the following commands.
#multipathd show config#multipath -t
You probably will not need to modify the values for these devices, but if you do you can overwrite the default values by including an entry in the configuration file for the device that overwrites those values. You can copy the device configuration defaults for the device that the
multipathd show config command displays and override the values that you want to change.
To add a device that is not configured automatically by default to this section of the configuration file, you need to set the
vendor and product parameters. You can find these values by looking at /sys/block/device_name/device/vendor and /sys/block/device_name/device/model where device_name is the device to be multipathed, as in the following example:
#cat /sys/block/sda/device/vendorWINSYS #cat /sys/block/sda/device/modelSF2372
The additional parameters to specify depend on your specific device. If the device is active/active, you will usually not need to set additional parameters. You may want to set
path_grouping_policy to multibus. Other parameters you may need to set are no_path_retry and rr_min_io, as described in Table 4.3, “Device Attributes”.
If the device is active/passive, but it automatically switches paths with I/O to the passive path, you need to change the checker function to one that does not send I/O to the path to test if it is working (otherwise, your device will keep failing over). This almost always means that you set the
path_checker to tur; this works for all SCSI devices that support the Test Unit Ready command, which most do.
If the device needs a special command to switch paths, then configuring this device for multipath requires a hardware handler kernel module. The current available hardware handler is
emc. If this is not sufficient for your device, you may not be able to configure the device for multipath.
Table 4.3. Device Attributes
| Attribute | Description | ||||||||
|---|---|---|---|---|---|---|---|---|---|
vendor | Specifies the vendor name of the storage device to which the device attributes apply, for example COMPAQ. | ||||||||
product | Specifies the product name of the storage device to which the device attributes apply, for example HSV110 (C)COMPAQ. | ||||||||
revision | Specifies the product revision identifier of the storage device. | ||||||||
product_blacklist | Specifies a regular expression used to blacklist devices by product. | ||||||||
alias_prefix | The user_friendly_names prefix to use for this device type, instead of the default "mpath". | ||||||||
hardware_handler |
| ||||||||
path_grouping_policy |
| ||||||||
path_selector |
| ||||||||
path_checker |
| ||||||||
features |
| ||||||||
prio |
| ||||||||
failback |
| ||||||||
rr_weight | If set to priorities, then instead of sending rr_min_io requests to a path before calling path_selector to choose the next path, the number of requests to send is determined by rr_min_io times the path's priority, as determined by the prio function. If set to uniform, all path weights are equal. | ||||||||
no_path_retry |
| ||||||||
rr_min_io | Specifies the number of I/O requests to route to a path before switching to the next path in the current path group. This setting is only for systems running kernels older that 2.6.31. Newer systems should use rr_min_io_rq. The default value is 1000. | ||||||||
rr_min_io_rq | Specifies the number of I/O requests to route to a path before switching to the next path in the current path group, using request-based device-mapper-multipath. This setting should be used on systems running current kernels. On systems running kernels older than 2.6.31, use rr_min_io. The default value is 1. | ||||||||
fast_io_fail_tmo | The number of seconds the SCSI layer will wait after a problem has been detected on an FC remote port before failing I/O to devices on that remote port. This value should be smaller than the value of dev_loss_tmo. Setting this to off will disable the timeout. The fast_io_fail_tmo option overrides the values of the recovery_tmo and replacement_timeout options. For details, see Section 4.6, “iSCSI and DM Multipath overrides”. | ||||||||
dev_loss_tmo | The number of seconds the SCSI layer will wait after a problem has been detected on an FC remote port before removing it from the system. Setting this to infinity will set this to 2147483647 seconds,or 68 years. | ||||||||
flush_on_last_del | If set to yes, the multipathd daemon will disable queuing when the last path to a device has been deleted. | ||||||||
user_friendly_names | If set to yes, specifies that the system should use the /etc/multipath/bindings file to assign a persistent and unique alias to the multipath, in the form of mpathn. If set to no, specifies that the system should use use the WWID as the alias for the multipath. In either case, what is specified here will be overridden by any device-specific aliases you specify in the multipaths section of the configuration file. The default value is no. | ||||||||
retain_attached_hw_handler | If this parameter is set to yes and the SCSI layer has already attached a hardware handler to the path device, multipath will not force the device to use the hardware_handler specified by the multipath.conf file. If the SCSI layer has not attached a hardware handler, multipath will continue to use its configured hardware handler as usual. The default value is no. | ||||||||
detect_prio | If this is set to yes, multipath will first check if the device supports ALUA, and if so it will automatically assign the device the alua prioritizer. If the device does not support ALUA, it will determine the prioritizer as it always does. | ||||||||
uid_attribute | Provides a unique path identifier. | ||||||||
delay_watch_checks | (Red Hat Enterprise Linux Release 7.2 and later) If set to a value greater than 0, the multipathd daemon will watch paths that have recently become valid for the specified number of checks. If they fail again while they are being watched, when they next become valid they will not be used until they have stayed up for the number of consecutive checks specified with delay_wait_checks. This allows you to keep paths that may be unreliable from immediately being put back into use as soon as they come back online. | ||||||||
delay_wait_checks | (Red Hat Enterprise Linux Release 7.2 and later) If set to a value greater than 0, when a device that has recently come back online fails again within the number of checks specified with delay_watch_checks, the next time it comes back online it will be marked and delayed and it will not be used until it has passed the number of checks specified in delay_wait_checks. | ||||||||
deferred_remove | If set to yes, multipathd will do a deferred remove instead of a regular remove when the last path device has been deleted. This ensures that if a multipathed device is in use when a regular remove is performed and the remove fails, the device will automatically be removed when the last user closes the device. | ||||||||
skip_kpartx | (Red Hat Enterprise Linux Release 7.3 and later) If set to yes, kpartx will not automatically create partitions on the device. This allows users to create a multipath device without creating partitions, even if the device has a partition table. | ||||||||
max_sectors_kb | (Red Hat Enterprise Linux Release 7.4 and later) Sets the max_sectors_kb device queue parameter to the specified value on all underlying paths of a multipath device before the multipath device is first activated. When a multipath device is created, the device inherits the max_sectors_kb value from the path devices. Manually raising this value for the multipath device or lowering this value for the path devices can cause multipath to create I/O operations larger than the path devices allow. Using the max_sectors_kb parameter is an easy way to set these values before a multipath device is created on top of the path devices and prevent invalid-sized I/O operations from being passed If this parameter is not set by the user, the path devices have it set by their device driver, and the multipath device inherits it from the path devices. | ||||||||
detect_path_checker | (Red Hat Enterprise Linux Release 7.4 and later) If set to yes, multipath will try to detect if the device supports ALUA. If so, the device will automatically use the tur path checker. If not, the path_checker will be selected as usual. | ||||||||
all_devs | When this parameter is set to yes, all of the options set in this device configuration will override the values for those options in all of the other device configurations, both the ones in the configuration file and the built-in defaults. | ||||||||
all_tg_pt | (Red Hat Enterprise Linux Release 7.6 and later) If this option is set to yes, when mpathpersist registers keys it will treat a key registered from one host to one target port as going from one host to all target ports. This must be set to yes to successfully use mpathpersist on arrays that automatically set and clear registration keys on all target ports from a host, instead of per target port per host. |
The following example shows a
device entry in the multipath configuration file.
# }
# device {
# vendor "COMPAQ "
# product "MSA1000 "
# path_grouping_policy multibus
# path_checker tur
# rr_weight priorities
# }
#}
The following configuration sets
no_path_retry to fail for all of the built-in device configurations.
devices {
device {
all_devs yes
no_path_retry fail
}
}
4.6. iSCSI and DM Multipath overrides
The
recovery_tmo sysfs option controls the timeout for a particular iSCSI device. The following options globally override recovery_tmo values:
- The
replacement_timeoutconfiguration option globally overrides therecovery_tmovalue for all iSCSI devices. - For all iSCSI devices that are managed by DM Multipath, the
fast_io_fail_tmooption in DM Multipath globally overrides therecovery_tmovalue. Thefast_io_fail_tmooption in DM Multipath also overrides thefast_io_fail_tmooption in Fibre Channel devices.The DM Multipathfast_io_fail_tmooption takes precedence overreplacement_timeout. Red Hat does not recommend usingreplacement_timeoutto overriderecovery_tmoin devices managed by DM Multipath because DM Multipath always resetsrecovery_tmowhen themultipathdservice reloads.
Chapter 5. DM Multipath Administration and Troubleshooting
This chapter provides information on administering DM Multipath on a running system.
5.1. Automatic Configuration File Generation with Multipath Helper
You can generate a basic configuration for multipath devices on Red Hat Enterprise Linux with the Multipath Helper application. The application gives you options to create multipath configurations with custom aliases, device blacklists, and settings for the characteristics of individual multipath devices. Upon completion, the application generates an installation script that includes the configuration parameters you selected and it provides a
multipath.conf configuration file for review.
The Multipath Helper application can be found at https://access.redhat.com/labsinfo/multipathhelper.
5.2. Resizing an Online Multipath Device
If you need to resize an online multipath device, use the following procedure.
- Resize your physical device.
- Execute the following command to find the paths to the LUN:
#
multipath -l - Resize your paths. For SCSI devices, writing a 1 to the
rescanfile for the device causes the SCSI driver to rescan, as in the following command:#
echo 1 > /sys/block/path_device/device/rescanEnsure that you run this command for each of the path devices. For example, if your path devices aresda,sdb,sde, andsdf, you would run the following commands:#
echo 1 > /sys/block/sda/device/rescan#echo 1 > /sys/block/sdb/device/rescan#echo 1 > /sys/block/sde/device/rescan#echo 1 > /sys/block/sdf/device/rescan - Resize your multipath device by executing the
multipathd resizecommand:#
multipathd resize map multipath_device - Resize the file system (assuming no LVM or DOS partitions are used):
#
resize2fs /dev/mapper/mpatha
5.3. Moving root File Systems from a Single Path Device to a Multipath Device
If you have installed your system on a single-path device and later add another path to the root file system, you will need to move your root file system to a multipathed device. This section documents the procedure for moving from a single-path to a multipathed device.
After ensuring that you have installed the
device-mapper-multipath package, perform the following procedure:
- Execute the following command to create the
/etc/multipath.confconfiguration file, load the multipath module, and setchkconfigfor themultipathdtoon:#
mpathconf --enableFor further information on using thempathconfcommand to set up multipathing, see Section 3.1, “Setting Up DM Multipath”. - If the
find_multipathsconfiguration parameter is not set toyes, edit theblacklistandblacklist_exceptionssections of the/etc/multipath.conffile, as described in Section 4.2, “Configuration File Blacklist”. - In order for multipath to build a multipath device on top of the root device as soon as it is discovered, enter the following command. This command also ensures that
find_multipathswill allow the device, even if it only has one path.#
multipath -a root_devnameFor example, if the root device is/dev/sdb, enter the following command.#
multipath -a /dev/sdbwwid '3600d02300069c9ce09d41c4ac9c53200' added - To confirm that your configuration file is set up correctly, you can enter the
multipathcommand and search the output for a line of the following format. This indicates that the command failed to create the multipath device.date wwid: ignoring map
For example, if the WWID if the device is 3600d02300069c9ce09d41c4ac9c53200, you would see a line in the output such as the following:#
multipathOct 21 09:37:19 | 3600d02300069c9ce09d41c4ac9c53200: ignoring map - To rebuild the
initramfsfile system withmultipath, execute thedracutcommand with the following options:#
dracut --force -H --add multipath - Shut the machine down.
- Configure the FC switch so that other paths are visible to the machine.
- Boot the machine.
- Check whether the root file system ('/') is on the multipathed device.
5.4. Moving swap File Systems from a Single Path Device to a Multipath Device
By default, swap devices are set up as logical volumes. This does not require any special procedure for configuring them as multipath devices as long as you set up multipathing on the physical volumes that constitute the logical volume group. If your swap device is not an LVM volume, however, and it is mounted by device name, you may need to edit the
/etc/fstab file to switch to the appropriate multipath device name.
- Determine the WWID number of the swap device by running the
/sbin/multipathcommand with the-v3option. The output from the command should show the swap device in the paths list.You should look in the command output for a line of the following format, showing the swap device:WWID H:B:T:L devname MAJOR:MINOR
For example, if your swap file system is set up onsdaor one of its partitions, you would see a line in the output such as the following:===== paths list ===== ... 1ATA WDC WD800JD-75MSA3 WD-WMAM9F 1:0:0:0 sda 8:0 ...
- Set up an alias for the swap device in the
/etc/multipath.conffile:multipaths { multipath { wwid WWID_of_swap_device alias swapdev } } - Edit the
/etc/fstabfile and replace the old device path to the root device with the multipath device.For example, if you had the following entry in the/etc/fstabfile:/dev/sda2 swap swap defaults 0 0
You would change the entry to the following:/dev/mapper/swapdev swap swap defaults 0 0
5.5. The Multipath Daemon
If you find you have trouble implementing a multipath configuration, you should ensure that the multipath daemon is running, as described in Chapter 3, Setting Up DM Multipath. The
multipathd daemon must be running in order to use multipathed devices.
5.6. Issues with queue_if_no_path feature
If a multipath device is configured with
features "1 queue_if_no_path", then any process that issues I/O will hang until one or more paths are restored. To avoid this, set the no_path_retry N parameter in the /etc/multipath.conf file (where N is the number of times the system should retry a path).
If you need to use the
features "1 queue_if_no_path" option and you experience the issue noted here, use the dmsetup command to edit the policy at runtime for a particular LUN (that is, for which all the paths are unavailable). For example, if you want to change the policy on the multipath device mpathc from "queue_if_no_path" to "fail_if_no_path", execute the following command.
dmsetup message mpathc 0 "fail_if_no_path"
Note that you must specify the
mpathn alias rather than the path.
5.7. Multipath Command Output
When you create, modify, or list a multipath device, you get a display of the current device setup. The format is as follows.
For each multipath device:
action_if_any: alias (wwid_if_different_from_alias) dm_device_name_if_known vendor,product size=size features='features' hwhandler='hardware_handler' wp=write_permission_if_known
For each path group:
-+- policy='scheduling_policy' prio=prio_if_known status=path_group_status_if_known
For each path:
`- host:channel:id:lun devnode major:minor dm_status_if_known path_status online_status
For example, the output of a multipath command might appear as follows:
3600d0230000000000e13955cc3757800 dm-1 WINSYS,SF2372 size=269G features='0' hwhandler='0' wp=rw |-+- policy='round-robin 0' prio=1 status=active | `- 6:0:0:0 sdb 8:16 active ready running `-+- policy='round-robin 0' prio=1 status=enabled `- 7:0:0:0 sdf 8:80 active ready running
If the path is up and ready for I/O, the status of the path is
ready or ghost. If the path is down, the status is faulty or shaky. The path status is updated periodically by the multipathd daemon based on the polling interval defined in the /etc/multipath.conf file.
The dm status is similar to the path status, but from the kernel's point of view. The dm status has two states:
failed, which is analogous to faulty, and active which covers all other path states. Occasionally, the path state and the dm state of a device will temporarily not agree.
The possible values for
online_status are running and offline. A status of offline means that this SCSI device has been disabled.
Note
When a multipath device is being created or modified, the path group status, the dm device name, the write permissions, and the dm status are not known. Also, the features are not always correct.
5.8. Multipath Queries with multipath Command
You can use the
-l and -ll options of the multipath command to display the current multipath configuration. The -l option displays multipath topology gathered from information in sysfs and the device mapper. The -ll option displays the information the -l option displays in addition to all other available components of the system.
When displaying the multipath configuration, there are three verbosity levels you can specify with the
-v option of the multipath command. Specifying -v0 yields no output. Specifying -v1 outputs the created or updated multipath names only, which you can then feed to other tools such as kpartx. Specifying -v2 prints all detected paths, multipaths, and device maps.
The following example shows the output of a
multipath -l command.
# multipath -l
3600d0230000000000e13955cc3757800 dm-1 WINSYS,SF2372
size=269G features='0' hwhandler='0' wp=rw
|-+- policy='round-robin 0' prio=1 status=active
| `- 6:0:0:0 sdb 8:16 active ready running
`-+- policy='round-robin 0' prio=1 status=enabled
`- 7:0:0:0 sdf 8:80 active ready running
The following example shows the output of a
multipath -ll command.
# multipath -ll
3600d0230000000000e13955cc3757801 dm-10 WINSYS,SF2372
size=269G features='0' hwhandler='0' wp=rw
|-+- policy='round-robin 0' prio=1 status=enabled
| `- 19:0:0:1 sdc 8:32 active ready running
`-+- policy='round-robin 0' prio=1 status=enabled
`- 18:0:0:1 sdh 8:112 active ready running
3600d0230000000000e13955cc3757803 dm-2 WINSYS,SF2372
size=125G features='0' hwhandler='0' wp=rw
`-+- policy='round-robin 0' prio=1 status=active
|- 19:0:0:3 sde 8:64 active ready running
`- 18:0:0:3 sdj 8:144 active ready running
5.9. Multipath Command Options
Table 5.1, “Useful
multipath Command Options” describes some options of the multipath command that you may find useful.
Table 5.1. Useful multipath Command Options
| Option | Description |
|---|---|
-l | Display the current multipath configuration gathered from sysfs and the device mapper. |
-ll | Display the current multipath configuration gathered from sysfs, the device mapper, and all other available components on the system. |
-f device | Remove the named multipath device. |
-F | Remove all unused multipath devices. |
-w device | Remove the wwid of the specified device from the wwids file. |
-W | Reset the wwids file to include only the current multipath devices. |
5.10. Determining Device Mapper Entries with the dmsetup Command
You can use the
dmsetup command to find out which device mapper entries match the multipathed devices.
The following command displays all the device mapper devices and their major and minor numbers. The minor numbers determine the name of the dm device. For example, a minor number of 3 corresponds to the multipathed device
/dev/dm-3.
# dmsetup ls
mpathd (253:4)
mpathep1 (253:12)
mpathfp1 (253:11)
mpathb (253:3)
mpathgp1 (253:14)
mpathhp1 (253:13)
mpatha (253:2)
mpathh (253:9)
mpathg (253:8)
VolGroup00-LogVol01 (253:1)
mpathf (253:7)
VolGroup00-LogVol00 (253:0)
mpathe (253:6)
mpathbp1 (253:10)
mpathd (253:5)
5.11. The multipathd Commands
The
multipathd commands can be used to administer the multipathd daemon. For information on the available multipathd commands, see the multipathd(8) man page.
The following command shows the standard default format for the output of the
multipathd show maps command.
# multipathd show maps
name sysfs uuid
mpathc dm-0 360a98000324669436c2b45666c567942
Some
multipathd commands include a format option followed by a wildcard. You can display a list of available wildcards with the following command.
# multipathd show wildcards
As of Red Hat Enterprise Linux release 7.3, the
multipathd command supports new format commands that show the status of multipath devices and paths in "raw" format versions. In raw format, no headers are printed and the fields are not padded to align the columns with the headers. Instead, the fields print exactly as specified in the format string. This output can then be more easily used for scripting. You can display the wildcards used in the format string with the multipathd show wildcards command.
The following
multipathd commands show the multipath devices that multipathd is monitoring, using a format string with multipath wildcards, in regular and raw format.
list|show maps|multipaths format $format list|show maps|multipaths raw format $format
The following
multipathd commands show the paths that multipathd is monitoring, using a format string with multipath wildcards, in regular and raw format.
list|show paths format $format list|show paths raw format $format
The following commands show the difference between the non-raw and raw formats for the
multipathd show maps. Note that in raw format there are no headers and only a single space between the columns.
#multipathd show maps format "%n %w %d %s"name uuid sysfs vend/prod/rev mpathc 360a98000324669436c2b45666c567942 dm-0 NETAPP,LUN #multipathd show maps raw format "%n %w %d %s"mpathc 360a98000324669436c2b45666c567942 dm-0 NETAPP,LUN
5.12. Troubleshooting with the multipathd Interactive Console
The
multipathd -k command is an interactive interface to the multipathd daemon. Entering this command brings up an interactive multipath console. After executing this command, you can enter help to get a list of available commands, you can enter a interactive command, or you can enter CTRL-D to quit.
The
multipathd interactive console can be used to troubleshoot problems you may be having with your system. For example, the following command sequence displays the multipath configuration, including the defaults, before exiting the console.
#multipathd -k> >show config> >CTRL-D
The following command sequence ensures that multipath has picked up any changes to the
multipath.conf,
#multipathd -k> >reconfigure> >CTRL-D
Use the following command sequence to ensure that the path checker is working properly.
#multipathd -k> >show paths> >CTRL-D
5.13. Cleaning up Multipath Files on Package Removal
If you should have occasion to remove the
device-mapper-multipath rpm. file, note that this does not remove the /etc/multipath.conf, /etc/multipath/bindings, and /etc/multipath/wwids files. You may need to remove those files manually on subsequent installations of the device-mapper-multipath package.
Appendix A. Revision History
| Revision History | |||
|---|---|---|---|
| Revision 7.1-1 | Wed Aug 7 2019 | ||
| |||
| Revision 6.1-1 | Thu Oct 4 2018 | ||
| |||
| Revision 5.1-1 | Thu Mar 15 2018 | ||
| |||
| Revision 5.1-0 | Wed Dec 13 2017 | ||
| |||
| Revision 4.0-6 | Wed Jul 19 2017 | ||
| |||
| Revision 4.0-3 | Wed May 10 2017 | ||
| |||
| Revision 0.4-5 | Wed Nov 16 2016 | ||
| |||
| Revision 0.4-3 | Mon Oct 24 2016 | ||
| |||
| Revision 0.4-1 | Mon Aug 15 2016 | ||
| |||
| Revision 0.3-6 | Mon Nov 9 2015 | ||
| |||
| Revision 0.3-3 | Wed Aug 19 2015 | ||
| |||
| Revision 0.2-7 | Mon Feb 16 2015 | ||
| |||
| Revision 0.2-6 | Thu Dec 11 2014 | ||
| |||
| Revision 0.1-22 | Mon Jun 2 2014 | ||
| |||
| Revision 0.1-10 | Wed Apr 9 2014 | ||
| |||
| Revision 0.1-3 | Tue Nov 26 2013 | ||
| |||
| Revision 0.1-1 | Wed Jan 16 2013 | ||
| |||
Index
Symbols
- /etc/multipath.conf package, Setting Up DM Multipath
A
- active/active configuration
- definition, Overview of DM Multipath
- illustration, Overview of DM Multipath
- active/passive configuration
- definition, Overview of DM Multipath
- illustration, Overview of DM Multipath
- alias parameter , Multipaths Device Configuration Attributes
- configuration file, Multipath Device Identifiers
- alias_prefix parameter, Configuration File Devices
- all_devs parameter, Configuration File Devices
- all_tg_pt parameter, Configuration File Defaults, Configuration File Devices
B
- blacklist
- configuration file, Configuration File Blacklist
- default devices, Blacklisting By Device Name
- device name, Blacklisting By Device Name
- device protocol, Blacklisting By Device Protocol (Red Hat Enterprise Linux 7.6 and Later)
- device type, Blacklisting By Device Type
- udev property, Blacklisting By udev Property (Red Hat Enterprise Linux 7.5 and Later)
- WWID, Blacklisting by WWID
- blacklist_exceptions section
- multipath.conf file, Blacklist Exceptions
C
- checker_timeout parameter, Configuration File Defaults
- configuration file
- alias parameter, Multipaths Device Configuration Attributes
- alias_prefix parameter, Configuration File Devices
- all_devs parameter, Configuration File Devices
- all_tg_pt parameter, Configuration File Defaults, Configuration File Devices
- blacklist, Configuration File Blacklist
- checker_timeout parameter, Configuration File Defaults
- config_dir parameter, Configuration File Defaults
- deferred_remove parameter, Configuration File Defaults, Multipaths Device Configuration Attributes, Configuration File Devices
- delay_wait_checks parameter, Configuration File Defaults, Multipaths Device Configuration Attributes, Configuration File Devices
- delay_watch_checks parameter, Configuration File Defaults, Multipaths Device Configuration Attributes, Configuration File Devices
- detect_path_checker parameter, Configuration File Defaults, Configuration File Devices
- detect_prio parameter, Configuration File Defaults, Multipaths Device Configuration Attributes
- dev_loss_tmo parameter, Configuration File Defaults, Configuration File Devices
- disable_changed_wwids parameter, Configuration File Defaults
- failback parameter, Configuration File Defaults, Multipaths Device Configuration Attributes, Configuration File Devices
- fast_io_fail_tmo parameter, Configuration File Defaults, Configuration File Devices
- features parameter, Configuration File Defaults, Multipaths Device Configuration Attributes, Configuration File Devices
- flush_on_last_del parameter, Configuration File Defaults, Multipaths Device Configuration Attributes, Configuration File Devices
- force_sync parameter, Configuration File Defaults
- hardware_handler parameter, Configuration File Devices
- hw_string_match parameter, Configuration File Defaults
- ignore_new_boot_devs parameter, Configuration File Defaults
- log_checker_err parameter, Configuration File Defaults
- max_fds parameter, Configuration File Defaults
- max_sectors_kb parameter, Configuration File Defaults, Multipaths Device Configuration Attributes, Configuration File Devices
- new_bindings_in_boot parameter, Configuration File Defaults
- no_path_retry parameter, Configuration File Defaults, Multipaths Device Configuration Attributes, Configuration File Devices
- overview, Configuration File Overview
- path_checker parameter, Configuration File Defaults, Configuration File Devices
- path_grouping_policy parameter, Configuration File Defaults, Multipaths Device Configuration Attributes, Configuration File Devices
- path_selector parameter, Configuration File Defaults, Multipaths Device Configuration Attributes, Configuration File Devices
- polling-interval parameter, Configuration File Defaults
- prio parameter, Configuration File Defaults, Configuration File Devices
- prkeys_file parameter, Configuration File Defaults, Multipaths Device Configuration Attributes
- product parameter, Configuration File Devices
- product_blacklist parameter, Configuration File Devices
- queue_without_daemon parameter, Configuration File Defaults
- reassign_maps parameter, Configuration File Defaults
- remove_retries parameter, Configuration File Defaults
- retain_attached_hw_handler parameter, Configuration File Defaults, Multipaths Device Configuration Attributes
- retrigger_delay parameter, Configuration File Defaults
- retrigger_tries parameter, Configuration File Defaults
- revision parameter, Configuration File Devices
- rr_min_io parameter, Configuration File Defaults, Multipaths Device Configuration Attributes
- rr_weight parameter, Configuration File Defaults, Multipaths Device Configuration Attributes, Configuration File Devices
- skip_kpartx parameter, Configuration File Defaults, Multipaths Device Configuration Attributes, Configuration File Devices
- uid_attribute parameter, Configuration File Defaults, Configuration File Devices
- user_friendly_names parameter, Configuration File Defaults, Multipaths Device Configuration Attributes, Configuration File Devices
- vendor parameter, Configuration File Devices
- verbosity parameter, Configuration File Defaults
- wwid parameter, Multipaths Device Configuration Attributes
- configuring
- DM Multipath, Setting Up DM Multipath
- config_dir parameter, Configuration File Defaults
D
- defaults section
- multipath.conf file, Configuration File Defaults
- deferred_remove parameter, Configuration File Defaults, Multipaths Device Configuration Attributes, Configuration File Devices
- delay_wait_checks parameter, Configuration File Defaults, Multipaths Device Configuration Attributes, Configuration File Devices
- delay_watch_checks parameter, Configuration File Defaults, Multipaths Device Configuration Attributes, Configuration File Devices
- detect_path_checker parameter, Configuration File Defaults, Configuration File Devices
- detect_prio parameter, Configuration File Defaults, Multipaths Device Configuration Attributes
- dev/mapper directory, Multipath Device Identifiers
- device name, Multipath Device Identifiers
- device-mapper-multipath package, Setting Up DM Multipath
- devices
- devices section
- multipath.conf file, Configuration File Devices
- dev_loss_tmo parameter, Configuration File Defaults, Configuration File Devices
- disable_changed_wwids parameter, Configuration File Defaults
- DM Multipath
- and LVM, Multipath Devices in Logical Volumes
- components, DM Multipath Components
- configuration file, The DM Multipath Configuration File
- configuring, Setting Up DM Multipath
- definition, Device Mapper Multipathing
- device name, Multipath Device Identifiers
- devices, Multipath Devices
- failover, Overview of DM Multipath
- overview, Overview of DM Multipath
- redundancy, Overview of DM Multipath
- setup, Setting Up DM Multipath
- setup, overview, DM Multipath Setup Overview
- dm-n devices, Multipath Device Identifiers
- dmsetup command, determining device mapper entries, Determining Device Mapper Entries with the dmsetup Command
- dm_multipath kernel module , DM Multipath Components
F
- failback parameter, Configuration File Defaults, Multipaths Device Configuration Attributes, Configuration File Devices
- failover, Overview of DM Multipath
- fast_io_fail_tmo parameter, Configuration File Defaults, Configuration File Devices
- features parameter, Configuration File Defaults, Multipaths Device Configuration Attributes, Configuration File Devices
- features, new and changed, New and Changed Features
- flush_on_last_del parameter, Configuration File Defaults, Multipaths Device Configuration Attributes, Configuration File Devices
- force_sync parameter, Configuration File Defaults
H
- hardware_handler parameter, Configuration File Devices
- hw_string_match parameter, Configuration File Defaults
I
- ignore_new_boot_devs parameter, Configuration File Defaults
- initramfs
- starting multipath, Setting Up Multipathing in the initramfs File System
K
- kpartx command , DM Multipath Components
L
- local disks, ignoring, Ignoring Local Disks when Generating Multipath Devices
- log_checker_err parameter, Configuration File Defaults
- LVM physical volumes
- multipath devices, Multipath Devices in Logical Volumes
- lvm.conf file , Multipath Devices in Logical Volumes
M
- max_fds parameter, Configuration File Defaults
- max_sectors_kb parameter, Configuration File Defaults, Multipaths Device Configuration Attributes, Configuration File Devices
- mpathconf command , DM Multipath Components
- multipath command , DM Multipath Components
- options, Multipath Command Options
- output, Multipath Command Output
- queries, Multipath Queries with multipath Command
- multipath daemon (multipathd), The Multipath Daemon
- multipath devices, Multipath Devices
- logical volumes, Multipath Devices in Logical Volumes
- LVM physical volumes, Multipath Devices in Logical Volumes
- Multipath Helper, Automatic Configuration File Generation with Multipath Helper
- multipath.conf file, Storage Array Support, The DM Multipath Configuration File
- blacklist_exceptions section, Blacklist Exceptions
- defaults section, Configuration File Defaults
- devices section, Configuration File Devices
- multipaths section, Multipaths Device Configuration Attributes
- multipathd
- command, Troubleshooting with the multipathd Interactive Console
- interactive console, Troubleshooting with the multipathd Interactive Console
- multipathd daemon , DM Multipath Components
- multipathd start command, Setting Up DM Multipath
- multipathed root file system, Moving root File Systems from a Single Path Device to a Multipath Device
- multipathed swap file system, Moving swap File Systems from a Single Path Device to a Multipath Device
- multipaths section
- multipath.conf file, Multipaths Device Configuration Attributes
N
- new_bindings_in_boot parameter, Configuration File Defaults
- no_path_retry parameter, Configuration File Defaults, Multipaths Device Configuration Attributes, Configuration File Devices
O
- overview
- features, new and changed, New and Changed Features
P
- path_checker parameter, Configuration File Defaults, Configuration File Devices
- path_grouping_policy parameter, Configuration File Defaults, Multipaths Device Configuration Attributes, Configuration File Devices
- path_selector parameter, Configuration File Defaults, Multipaths Device Configuration Attributes, Configuration File Devices
- polling_interval parameter, Configuration File Defaults
- prio parameter, Configuration File Defaults, Configuration File Devices
- prkeys_file parameter, Configuration File Defaults, Multipaths Device Configuration Attributes
- product parameter, Configuration File Devices
- product_blacklist parameter, Configuration File Devices
Q
- queue_without_daemon parameter, Configuration File Defaults
R
- reassign_maps parameter, Configuration File Defaults
- remove_retries parameter, Configuration File Defaults
- resizing a multipath device, Resizing an Online Multipath Device
- retain_attached_hw_handler parameter, Configuration File Defaults, Multipaths Device Configuration Attributes
- retrigger_delay parameter, Configuration File Defaults
- retrigger_tries parameter, Configuration File Defaults
- revision parameter, Configuration File Devices
- root file system, Moving root File Systems from a Single Path Device to a Multipath Device
- rr_min_io parameter, Configuration File Defaults, Multipaths Device Configuration Attributes
- rr_weight parameter, Configuration File Defaults, Multipaths Device Configuration Attributes, Configuration File Devices
S
- setup
- DM Multipath, Setting Up DM Multipath
- skip_kpartxr parameter, Configuration File Defaults, Multipaths Device Configuration Attributes, Configuration File Devices
- storage array support, Storage Array Support
- storage arrays
- swap file system, Moving swap File Systems from a Single Path Device to a Multipath Device
U
- uid_attribute parameter, Configuration File Defaults, Configuration File Devices
- user_friendly_names parameter , Multipath Device Identifiers, Configuration File Defaults, Multipaths Device Configuration Attributes, Configuration File Devices
V
- vendor parameter, Configuration File Devices
- verbosity parameter, Configuration File Defaults
W
- World Wide Identifier (WWID), Multipath Device Identifiers
- wwid parameter, Multipaths Device Configuration Attributes
Legal Notice
Copyright © 2018 Red Hat, Inc.
This document is licensed by Red Hat under the Creative Commons Attribution-ShareAlike 3.0 Unported License. If you distribute this document, or a modified version of it, you must provide attribution to Red Hat, Inc. and provide a link to the original. If the document is modified, all Red Hat trademarks must be removed.
Red Hat, as the licensor of this document, waives the right to enforce, and agrees not to assert, Section 4d of CC-BY-SA to the fullest extent permitted by applicable law.
Red Hat, Red Hat Enterprise Linux, the Shadowman logo, the Red Hat logo, JBoss, OpenShift, Fedora, the Infinity logo, and RHCE are trademarks of Red Hat, Inc., registered in the United States and other countries.
Linux® is the registered trademark of Linus Torvalds in the United States and other countries.
Java® is a registered trademark of Oracle and/or its affiliates.
XFS® is a trademark of Silicon Graphics International Corp. or its subsidiaries in the United States and/or other countries.
MySQL® is a registered trademark of MySQL AB in the United States, the European Union and other countries.
Node.js® is an official trademark of Joyent. Red Hat is not formally related to or endorsed by the official Joyent Node.js open source or commercial project.
The OpenStack® Word Mark and OpenStack logo are either registered trademarks/service marks or trademarks/service marks of the OpenStack Foundation, in the United States and other countries and are used with the OpenStack Foundation's permission. We are not affiliated with, endorsed or sponsored by the OpenStack Foundation, or the OpenStack community.
All other trademarks are the property of their respective owners.