
Red Hat Training
A Red Hat training course is available for RHEL 8
Managing, monitoring, and updating the kernel
Um guia para gerenciar o kernel do Linux no Red Hat Enterprise Linux 8
Resumo
Tornando o código aberto mais inclusivo
A Red Hat tem o compromisso de substituir a linguagem problemática em nosso código, documentação e propriedades da web. Estamos começando com estes quatro termos: master, slave, blacklist e whitelist. Por causa da enormidade deste esforço, estas mudanças serão implementadas gradualmente ao longo de vários lançamentos futuros. Para mais detalhes, veja a mensagem de nosso CTO Chris Wright.
Fornecendo feedback sobre a documentação da Red Hat
Agradecemos sua contribuição em nossa documentação. Por favor, diga-nos como podemos melhorá-la. Para fazer isso:
Para comentários simples sobre passagens específicas:
- Certifique-se de que você está visualizando a documentação no formato Multi-page HTML. Além disso, certifique-se de ver o botão Feedback no canto superior direito do documento.
- Use o cursor do mouse para destacar a parte do texto que você deseja comentar.
- Clique no pop-up Add Feedback que aparece abaixo do texto destacado.
- Siga as instruções apresentadas.
Para enviar comentários mais complexos, crie um bilhete Bugzilla:
- Ir para o site da Bugzilla.
- Como Componente, use Documentation.
- Preencha o campo Description com sua sugestão de melhoria. Inclua um link para a(s) parte(s) relevante(s) da documentação.
- Clique em Submit Bug.
Capítulo 1. O RPM do kernel Linux
As seções seguintes descrevem o pacote RPM do kernel Linux fornecido e mantido pela Red Hat.
1.1. O que é um RPM
Um pacote RPM é um arquivo contendo outros arquivos e seus metadados (informações sobre os arquivos que são necessários ao sistema).
Especificamente, um pacote de RPM consiste no arquivo cpio.
O arquivo cpio contém:
- Arquivos
Cabeçalho RPM (metadados do pacote)
O gerenciador de pacotes
rpmutiliza estes metadados para determinar as dependências, onde instalar arquivos e outras informações.
Tipos de pacotes de RPM
Há dois tipos de pacotes de RPM. Ambos os tipos compartilham o formato do arquivo e as ferramentas, mas têm conteúdos diferentes e servem a propósitos diferentes:
Fonte RPM (SRPM)
Um SRPM contém o código fonte e um arquivo SPEC, que descreve como construir o código fonte em um RPM binário. Opcionalmente, os patches para o código-fonte também são incluídos.
RPM Binário
Um RPM binário contém os binários construídos a partir das fontes e remendos.
1.2. A visão geral do pacote RPM do kernel Linux
O kernel RPM é um meta pacote que não contém nenhum arquivo, mas assegura que os seguintes sub-pacotes estejam devidamente instalados:
-
kernel-core- contém um número mínimo de módulos de kernel necessários para a funcionalidade central. Este sub-pacote sozinho poderia ser usado em ambientes virtualizados e em nuvem para fornecer um kernel Red Hat Enterprise Linux 8 com um tempo de inicialização rápido e um tamanho de disco pequeno. -
kernel-modules- contém outros módulos do kernel. -
kernel-modules-extra- contém módulos de kernel para hardware raro.
O pequeno conjunto de sub-pacotes kernel acima visa fornecer uma superfície de manutenção reduzida aos administradores de sistemas, especialmente em ambientes virtualizados e nebulosos.
Os outros pacotes de kernel comuns são, por exemplo:
-
kernel-debug- Contém um kernel com numerosas opções de depuração habilitadas para o diagnóstico do kernel, às custas de um desempenho reduzido. -
kernel-tools- Contém ferramentas para manipular o kernel Linux e documentação de suporte. -
kernel-devel- Contém os cabeçalhos e os arquivos de kernel suficientes para construir módulos contra o pacotekernel. -
kernel-abi-whitelists- Contém informações relativas ao kernel ABI do Red Hat Enterprise Linux, incluindo uma lista de símbolos do kernel que são necessários para os módulos externos do kernel Linux e um plug-inyumpara ajudar na fiscalização. -
kernel-headers- Inclui os arquivos de cabeçalho C que especificam a interface entre o kernel Linux e as bibliotecas e programas de espaço do usuário. Os arquivos de cabeçalho definem estruturas e constantes que são necessárias para a construção da maioria dos programas padrão.
1.3. Exibição do conteúdo do pacote do kernel
O procedimento seguinte descreve como visualizar o conteúdo do pacote do kernel e seus sub-pacotes sem instalá-los usando o comando rpm.
Pré-requisitos
-
Obtido
kernel,kernel-core,kernel-modules,kernel-modules-extraPacotes de RPM para sua arquitetura de CPU
Procedimento
Listar módulos para
kernel:$ rpm -qlp <kernel_rpm>(contains no files) …Listar módulos para
kernel-core:$ rpm -qlp <kernel-core_rpm>… /lib/modules/4.18.0-80.el8.x86_64/kernel/fs/udf/udf.ko.xz /lib/modules/4.18.0-80.el8.x86_64/kernel/fs/xfs /lib/modules/4.18.0-80.el8.x86_64/kernel/fs/xfs/xfs.ko.xz /lib/modules/4.18.0-80.el8.x86_64/kernel/kernel /lib/modules/4.18.0-80.el8.x86_64/kernel/kernel/trace /lib/modules/4.18.0-80.el8.x86_64/kernel/kernel/trace/ring_buffer_benchmark.ko.xz /lib/modules/4.18.0-80.el8.x86_64/kernel/lib /lib/modules/4.18.0-80.el8.x86_64/kernel/lib/cordic.ko.xz …Listar módulos para
kernel-modules:$ rpm -qlp <kernel-modules_rpm>… /lib/modules/4.18.0-80.el8.x86_64/kernel/drivers/infiniband/hw/mlx4/mlx4_ib.ko.xz /lib/modules/4.18.0-80.el8.x86_64/kernel/drivers/infiniband/hw/mlx5/mlx5_ib.ko.xz /lib/modules/4.18.0-80.el8.x86_64/kernel/drivers/infiniband/hw/qedr/qedr.ko.xz /lib/modules/4.18.0-80.el8.x86_64/kernel/drivers/infiniband/hw/usnic/usnic_verbs.ko.xz /lib/modules/4.18.0-80.el8.x86_64/kernel/drivers/infiniband/hw/vmw_pvrdma/vmw_pvrdma.ko.xz …Listar módulos para
kernel-modules-extra:$ rpm -qlp <kernel-modules-extra_rpm>… /lib/modules/4.18.0-80.el8.x86_64/extra/net/sched/sch_cbq.ko.xz /lib/modules/4.18.0-80.el8.x86_64/extra/net/sched/sch_choke.ko.xz /lib/modules/4.18.0-80.el8.x86_64/extra/net/sched/sch_drr.ko.xz /lib/modules/4.18.0-80.el8.x86_64/extra/net/sched/sch_dsmark.ko.xz /lib/modules/4.18.0-80.el8.x86_64/extra/net/sched/sch_gred.ko.xz …
Recursos adicionais
-
Para informações sobre como usar o comando
rpmemkernelRPM já instalado, incluindo seus sub-pacotes, consulte a página do manualrpm(8). - Introdução a RPM packages
Capítulo 2. Atualização do kernel com yum
As seções seguintes trazem informações sobre o kernel Linux fornecido e mantido pela Red Hat (kernel da Red Hat), e como manter o kernel da Red Hat atualizado. Como conseqüência, o sistema operacional terá todas as últimas correções de bugs, melhorias de desempenho e patches, garantindo compatibilidade com novos hardwares.
2.1. O que é o cerne
O kernel é uma parte central de um sistema operacional Linux, que gerencia os recursos do sistema, e fornece interface entre aplicações de hardware e software. O kernel da Red Hat é um kernel personalizado baseado no kernel da linha principal do upstream Linux que os engenheiros da Red Hat desenvolvem e endurecem com foco na estabilidade e compatibilidade com as mais recentes tecnologias e hardware.
Antes que a Red Hat lance uma nova versão do kernel, o kernel precisa passar por um conjunto de rigorosos testes de garantia de qualidade.
Os núcleos da Red Hat são embalados no formato RPM para que sejam fáceis de serem atualizados e verificados pelo yum gerente de pacotes.
Os núcleos que não foram compilados pela Red Hat são not suportados pela Red Hat.
2.2. O que é yum
Esta seção se refere à descrição do yum package manager.
Recursos adicionais
-
Para mais informações em
yum, veja as seções relevantes de Configuring basic system settings.
2.3. Atualização do miolo
O procedimento a seguir descreve como atualizar o kernel usando o yum gerente de pacotes.
Procedimento
Para atualizar o kernel, use o seguinte:
# yum update kernelEste comando atualiza o kernel junto com todas as dependências para a última versão disponível.
- Reinicie seu sistema para que as mudanças entrem em vigor.
Ao atualizar do Red Hat Enterprise Linux 7 para o Red Hat Enterprise Linux 8, siga as seções relevantes do Upgrading from RHEL 7 to RHEL 8 documento.
2.4. Instalando o miolo
O seguinte procedimento descreve como instalar novos núcleos utilizando o yum gerente de pacotes.
Procedimento
Para instalar uma versão específica do kernel, use o seguinte:
# yum install kernel-{version}
Recursos adicionais
- Para uma lista dos grãos disponíveis, consulte Red Hat Code Browser.
- Para uma lista de datas de lançamento de versões específicas do kernel, veja this article.
Capítulo 3. Gerenciando módulos do núcleo
As seções seguintes explicam o que são módulos do kernel, como exibir suas informações e como realizar tarefas administrativas básicas com módulos do kernel.
3.1. Introdução aos módulos do kernel
O kernel do Red Hat Enterprise Linux pode ser estendido com partes adicionais opcionais de funcionalidade, chamadas módulos do kernel, sem a necessidade de reiniciar o sistema. No Red Hat Enterprise Linux 8, os módulos do kernel são código de kernel extra que é embutido em arquivos objetos comprimidos <KERNEL_MODULE_NAME>.ko.xz.
As funcionalidades mais comuns habilitadas pelos módulos do kernel são:
- Driver de dispositivo que adiciona suporte para novo hardware
-
Suporte para um sistema de arquivo como
GFS2ouNFS - Chamadas de sistema
Em sistemas modernos, os módulos do kernel são automaticamente carregados quando necessário. Entretanto, em alguns casos, é necessário carregar ou descarregar os módulos manualmente.
Como o próprio núcleo, os módulos podem tomar parâmetros que personalizam seu comportamento, se necessário.
São fornecidas ferramentas para inspecionar quais módulos estão funcionando atualmente, quais módulos estão disponíveis para carregar no kernel e quais parâmetros um módulo aceita. O ferramental também fornece um mecanismo para carregar e descarregar módulos do kernel para o kernel em execução.
3.2. Introdução à especificação do carregador de inicialização
A Especificação BootLoader (BLS) define um esquema e o formato de arquivo para gerenciar a configuração do bootloader para cada opção de boot no diretório drop-in sem a necessidade de manipular os arquivos de configuração do bootloader. Ao contrário das abordagens anteriores, cada entrada de boot é agora representada por um arquivo de configuração separado no diretório drop-in. O diretório suspenso estende sua configuração sem ter a necessidade de editar ou regenerar os arquivos de configuração. O BLS estende este conceito para as entradas do menu de inicialização.
Usando o BLS, você pode gerenciar as opções do menu bootloader adicionando, removendo ou editando arquivos individuais de entrada de boot em um diretório. Isto torna o processo de instalação do kernel significativamente mais simples e consistente entre as diferentes arquiteturas.
A ferramenta grubby é um roteiro de embalagem fina em torno do BLS e suporta os mesmos argumentos e opções grubby. Ela roda o dracut para criar uma imagem inicial do ramdisk. Com esta configuração, os arquivos de configuração do núcleo do bootloader são estáticos e não são modificados após a instalação do kernel.
Esta premissa é particularmente relevante no Red Hat Enterprise Linux 8 porque o mesmo bootloader não é usado em todas as arquiteturas. GRUB2 é usado na maioria delas como o ARM de 64 bits, mas variantes poucoendianas do IBM Power Systems com camada aberta de abstração de energia (OPAL) usa Petitboot e a arquitetura IBM Z usa zipl.
Recursos adicionais
-
Para mais informações sobre a utilidade
grubby, veja O que é grubby. - Para mais detalhes sobre as entradas de inicialização, veja O que são entradas de inicialização
-
Para mais detalhes, consulte a página do manual
grubby(8).
3.3. Dependências do módulo Kernel
Certos módulos do núcleo às vezes dependem de um ou mais outros módulos do núcleo. O arquivo /lib/modules/<KERNEL_VERSION>/modules.dep contém uma lista completa das dependências dos módulos do kernel para a respectiva versão do kernel.
O arquivo de dependência é gerado pelo programa depmod, que é uma parte do pacote kmod. Muitas das utilidades fornecidas por kmod levam em conta as dependências dos módulos ao realizar operações, de modo que raramente é necessário o rastreamento de dependência manual.
O código dos módulos do kernel é executado no kernel-space no modo irrestrito. Por causa disso, você deve estar atento a quais módulos você está carregando.
Recursos adicionais
-
Para mais informações sobre
/lib/modules/<KERNEL_VERSION>/modules.dep, consulte a página do manualmodules.dep(5). -
Para mais detalhes, incluindo a sinopse e as opções de
depmod, consulte a página do manualdepmod(8).
3.4. Listagem dos módulos do kernel atualmente carregados
O procedimento seguinte descreve como visualizar os módulos do kernel atualmente carregados.
Pré-requisitos
-
O pacote
kmodestá instalado.
Procedimento
Para listar todos os módulos do kernel atualmente carregados, execute:
$ lsmod Module Size Used by fuse 126976 3 uinput 20480 1 xt_CHECKSUM 16384 1 ipt_MASQUERADE 16384 1 xt_conntrack 16384 1 ipt_REJECT 16384 1 nft_counter 16384 16 nf_nat_tftp 16384 0 nf_conntrack_tftp 16384 1 nf_nat_tftp tun 49152 1 bridge 192512 0 stp 16384 1 bridge llc 16384 2 bridge,stp nf_tables_set 32768 5 nft_fib_inet 16384 1 …No exemplo acima:
- A primeira coluna fornece o names dos módulos atualmente carregados.
- A segunda coluna exibe a quantidade de memory por módulo em quilobytes.
- A última coluna mostra o número e, opcionalmente, os nomes dos módulos que são dependent em um determinado módulo.
Recursos adicionais
-
Para mais informações sobre
kmod, consulte o arquivo/usr/share/doc/kmod/READMEou a página do manuallsmod(8).
3.5. Listagem de todos os kernels instalados
O procedimento seguinte descreve como usar a ferramenta de linha de comando grubby para listar as entradas de inicialização GRUB2.
Procedimento
Para listar as entradas de inicialização do kernel:
Para listar as entradas de inicialização do kernel, execute:
# grubby --info=ALL | grep titleO comando exibe as entradas de inicialização do kernel. O campo
kernelmostra o caminho do kernel.O procedimento seguinte descreve como usar o utilitário
grubbypara listar todos os kernels instalados em seus sistemas usando a linha de comando do kernel.
Como exemplo, considere listar grubby-8.40-17, a partir do menu Grub2, tanto nas instalações BLS quanto nas não-BLS.
Procedimento
Para listar todos os módulos de kernel instalados:
Executar o seguinte comando:
# grubby --info=ALL | grep titleA lista de todos os kernels instalados é exibida da seguinte forma:
title=Red Hat Enterprise Linux (4.18.0-20.el8.x86_64) 8.0 (Ootpa) title=Red Hat Enterprise Linux (4.18.0-19.el8.x86_64) 8.0 (Ootpa) title=Red Hat Enterprise Linux (4.18.0-12.el8.x86_64) 8.0 (Ootpa) title=Red Hat Enterprise Linux (4.18.0) 8.0 (Ootpa) title=Red Hat Enterprise Linux (0-rescue-2fb13ddde2e24fde9e6a246a942caed1) 8.0 (Ootpa)
A saída acima mostra a lista de todos os kernels instalados para grubby-8.40-17, usando o menu Grub2.
3.6. Definir um kernel como padrão
O procedimento seguinte descreve como definir um kernel específico como padrão usando a ferramenta de linha de comando grubby e GRUB2.
Procedimento
- Configurando o kernel como padrão, usando a ferramenta
grubby -
Execute o seguinte comando para definir o kernel como padrão usando a ferramenta
grubby:
# grubby --set-default $kernel_pathO comando usa uma identificação de máquina sem o sufixo
.confcomo argumento.NotaA identificação da máquina está localizada no diretório
/boot/loader/entries/.-
Execute o seguinte comando para definir o kernel como padrão usando a ferramenta
- Definindo o kernel como padrão, usando o argumento
id -
Liste as entradas de inicialização usando o argumento
ide, em seguida, defina um kernel pretendido como padrão:
# grubby --info ALL | grep id # grubby --set-default /boot/vmlinuz-<version>.<architecture>
NotaPara listar as entradas de inicialização usando o argumento
title, execute o# grubby --info=ALL | grep titlecomando.-
Liste as entradas de inicialização usando o argumento
- Configurando o kernel padrão apenas para o próximo boot
-
Execute o seguinte comando para definir o kernel padrão apenas para a próxima reinicialização usando o comando
grub2-reboot:
# grub2-reboot <index|title|id>AtençãoDefina com cuidado o kernel padrão para apenas o próximo boot. A instalação de novos kernel RPM's, kernels auto-construídos e a adição manual das entradas no diretório
/boot/loader/entries/podem alterar os valores do índice.-
Execute o seguinte comando para definir o kernel padrão apenas para a próxima reinicialização usando o comando
3.7. Exibição de informações sobre os módulos do kernel
Ao trabalhar com um módulo de kernel, você pode querer ver mais informações sobre esse módulo. Este procedimento descreve como exibir informações extras sobre os módulos do kernel.
Pré-requisitos
-
O pacote
kmodestá instalado.
Procedimento
Para exibir informações sobre qualquer módulo do kernel, execute:
$ modinfo <KERNEL_MODULE_NAME> For example: $ modinfo virtio_net filename: /lib/modules/4.18.0-94.el8.x86_64/kernel/drivers/net/virtio_net.ko.xz license: GPL description: Virtio network driver rhelversion: 8.1 srcversion: 2E9345B281A898A91319773 alias: virtio:d00000001v* depends: net_failover intree: Y name: virtio_net vermagic: 4.18.0-94.el8.x86_64 SMP mod_unload modversions … parm: napi_weight:int parm: csum:bool parm: gso:bool parm: napi_tx:bool
O comando
modinfoexibe algumas informações detalhadas sobre o módulo de kernel especificado. Você pode consultar informações sobre todos os módulos disponíveis, independentemente de estarem ou não carregados. As entradasparmmostram parâmetros que o usuário é capaz de definir para o módulo, e que tipo de valor eles esperam.NotaAo inserir o nome de um módulo de kernel, não anexe a extensão
.ko.xzao final do nome. Os nomes dos módulos do kernel não têm extensões; seus arquivos correspondentes têm.
Recursos adicionais
-
Para mais informações sobre o
modinfo, consulte a página do manualmodinfo(8).
3.8. Carregamento de módulos do núcleo em tempo de execução do sistema
A maneira ideal de expandir a funcionalidade do kernel Linux é carregando módulos do kernel. O procedimento seguinte descreve como usar o comando modprobe para encontrar e carregar um módulo do kernel no kernel atualmente em execução.
Pré-requisitos
- Permissões de raiz
-
O pacote
kmodestá instalado. - O respectivo módulo do núcleo não é carregado. Para garantir que este seja o caso, liste os módulos do kernel carregados.
Procedimento
Selecione um módulo de kernel que você deseja carregar.
Os módulos estão localizados no diretório
/lib/modules/$(uname -r)/kernel/<SUBSYSTEM>/.Carregar o módulo de núcleo relevante:
# modprobe <MODULE_NAME>NotaAo inserir o nome de um módulo de kernel, não anexe a extensão
.ko.xzao final do nome. Os nomes dos módulos do kernel não têm extensões; seus arquivos correspondentes têm.Opcionalmente, verifique se o módulo relevante foi carregado:
$ lsmod | grep <MODULE_NAME>Se o módulo foi carregado corretamente, este comando exibe o módulo do kernel relevante. Por exemplo:
$ lsmod | grep serio_raw serio_raw 16384 0
As mudanças descritas neste procedimento will not persist após reiniciar o sistema.
Recursos adicionais
-
Para mais detalhes sobre
modprobe, consulte a página do manualmodprobe(8).
3.9. Descarga de módulos do núcleo em tempo de execução do sistema
S vezes, você descobre que precisa descarregar certos módulos do kernel em execução. O procedimento seguinte descreve como usar o comando modprobe para encontrar e descarregar um módulo do kernel em tempo de execução do sistema a partir do kernel atualmente carregado.
Pré-requisitos
- Permissões de raiz
-
O pacote
kmodestá instalado.
Procedimento
Execute o comando
lsmode selecione um módulo do kernel que você deseja descarregar.Se um módulo de kernel tiver dependências, descarregue-as antes de descarregar o módulo de kernel. Para detalhes sobre a identificação de módulos com dependências, veja Seção 3.4, “Listagem dos módulos do kernel atualmente carregados”.
Descarregar o módulo do núcleo relevante:
# modprobe -r <MODULE_NAME>Ao inserir o nome de um módulo de kernel, não anexe a extensão
.ko.xzao final do nome. Os nomes dos módulos do kernel não têm extensões; seus arquivos correspondentes têm.AtençãoNão descarregue os módulos do núcleo quando eles são utilizados pelo sistema em execução. Isso pode levar a um sistema instável ou não-operacional.
Opcionalmente, verificar se o módulo relevante foi descarregado:
$ lsmod | grep <MODULE_NAME>Se o módulo foi descarregado com sucesso, este comando não exibe nenhuma saída.
Após terminar este procedimento, os módulos do kernel que são definidos para serem carregados automaticamente na inicialização, will not stay unloaded após reiniciar o sistema. Para informações sobre como combater este resultado, veja Prevenir que os módulos do kernel sejam carregados automaticamente no momento da inicialização do sistema.
Recursos adicionais
-
Para mais detalhes sobre
modprobe, consulte a página do manualmodprobe(8).
3.10. Carregamento automático dos módulos do núcleo no momento da inicialização do sistema
O procedimento a seguir descreve como configurar um módulo de kernel para que ele seja carregado automaticamente durante o processo de inicialização.
Pré-requisitos
- Permissões de raiz
-
O pacote
kmodestá instalado.
Procedimento
Selecione um módulo de kernel que você deseja carregar durante o processo de inicialização.
Os módulos estão localizados no diretório
/lib/modules/$(uname -r)/kernel/<SUBSYSTEM>/.Criar um arquivo de configuração para o módulo:
# echo <MODULE_NAME> > /etc/modules-load.d/<MODULE_NAME>.confNotaAo inserir o nome de um módulo de kernel, não anexe a extensão
.ko.xzao final do nome. Os nomes dos módulos do kernel não têm extensões; seus arquivos correspondentes têm.Opcionalmente, após a reinicialização, verificar se o módulo relevante foi carregado:
$ lsmod | grep <MODULE_NAME>O comando de exemplo acima deve ser bem sucedido e exibir o módulo de kernel relevante.
As mudanças descritas neste procedimento will persist após reiniciar o sistema.
Recursos adicionais
-
Para mais detalhes sobre o carregamento de módulos do kernel durante o processo de inicialização, consulte a página do manual
modules-load.d(5).
3.11. Impedir que os módulos do núcleo sejam carregados automaticamente no momento da inicialização do sistema
O procedimento seguinte descreve como adicionar um módulo de kernel a um denilista para que ele não seja carregado automaticamente durante o processo de inicialização.
Pré-requisitos
- Permissões de raiz
-
O pacote
kmodestá instalado. - Certifique-se de que um módulo do núcleo em um denilista não seja vital para a configuração atual de seu sistema.
Procedimento
Selecione um módulo do núcleo que você deseja colocar em um denilista:
$ lsmod Module Size Used by fuse 126976 3 xt_CHECKSUM 16384 1 ipt_MASQUERADE 16384 1 uinput 20480 1 xt_conntrack 16384 1 …O comando
lsmodexibe uma lista de módulos carregados para o kernel atualmente em execução.Alternativamente, identifique um módulo de kernel descarregado que você deseja evitar de carregar potencialmente.
Todos os módulos do kernel estão localizados no diretório
/lib/modules/<KERNEL_VERSION>/kernel/<SUBSYSTEM>/.
Criar um arquivo de configuração para um denilista:
# vim /etc/modprobe.d/blacklist.conf # Blacklists <KERNEL_MODULE_1> blacklist <MODULE_NAME_1> install <MODULE_NAME_1> /bin/false # Blacklists <KERNEL_MODULE_2> blacklist <MODULE_NAME_2> install <MODULE_NAME_2> /bin/false # Blacklists <KERNEL_MODULE_n> blacklist <MODULE_NAME_n> install <MODULE_NAME_n> /bin/false …
O exemplo mostra o conteúdo do arquivo
blacklist.conf, editado pelo editorvim. A linhablacklistgarante que o módulo do kernel relevante não será carregado automaticamente durante o processo de inicialização. O comandoblacklist, entretanto, não impede que o módulo seja carregado como uma dependência para outro módulo do kernel que não esteja em um denylist. Portanto, a linhainstallfaz com que o/bin/falseseja executado ao invés de instalar um módulo.As linhas que começam com um sinal de hash são comentários para tornar o arquivo mais legível.
NotaAo inserir o nome de um módulo de kernel, não anexe a extensão
.ko.xzao final do nome. Os nomes dos módulos do kernel não têm extensões; seus arquivos correspondentes têm.Criar uma cópia de segurança da imagem inicial do ramdisk atual antes de reconstruir:
# cp /boot/initramfs-$(uname -r).img /boot/initramfs-$(uname -r).bak.$(date %m-\r%H%M%S).imgO comando acima cria uma imagem de backup
initramfscaso a nova versão tenha um problema inesperado.Alternativamente, crie uma cópia de segurança de outra imagem ramdisk inicial que corresponda à versão do kernel para a qual você deseja colocar os módulos do kernel em um denylist:
# cp /boot/initramfs-<SOME_VERSION>.img /boot/initramfs-<SOME_VERSION>.img.bak.$(date %m-\r%H%M%S)
Gerar uma nova imagem ramdisk inicial para refletir as mudanças:
# dracut -f -vSe você estiver construindo uma imagem ramdisk inicial para uma versão do kernel diferente da que você está inicializando atualmente, especifique tanto a versão alvo
initramfsquanto a versão do kernel:# dracut -f -v /boot/initramfs-<TARGET_VERSION>.img <CORRESPONDING_TARGET_KERNEL_VERSION>
Reinicie o sistema:
$ reboot
As mudanças descritas neste procedimento will take effect and persist após reiniciar o sistema. Se você colocar inadequadamente um módulo chave do núcleo em um denylist, você pode enfrentar um sistema instável ou não operacional.
Recursos adicionais
-
Para mais detalhes sobre a utilidade
dracut, consulte a página do manualdracut(8).
3.12. Assinatura de módulos de kernel para inicialização segura
Você pode aumentar a segurança de seu sistema usando módulos de kernel assinados. As seções seguintes descrevem como autoassinar módulos de kernel privados para uso com o RHEL 8 em sistemas de construção baseados em UEFI onde o Secure Boot está habilitado. Estas seções também fornecem uma visão geral das opções disponíveis para importar sua chave pública para um sistema alvo onde você deseja implantar seus módulos do kernel.
Para assinar e carregar módulos do núcleo, você precisa:
Se a inicialização segura for ativada, os carregadores de inicialização do sistema operacional UEFI, o kernel do Red Hat Enterprise Linux e todos os módulos do kernel devem ser assinados com uma chave privada e autenticados com a chave pública correspondente. Se eles não forem assinados e autenticados, o sistema não terá permissão para terminar o processo de inicialização.
A distribuição RHEL 8 inclui:
- Carregadores de inicialização assinados
- Caroços assinados
- Módulos de kernel assinados
Além disso, o carregador de inicialização assinado no primeiro estágio e o kernel assinado incluem chaves públicas da Red Hat embutidas. Estes binários executáveis assinados e chaves incorporadas permitem que a RHEL 8 instale, inicialize e execute com as chaves da Microsoft UEFI Secure Boot Certification Authority que são fornecidas pelo firmware UEFI em sistemas que suportam o UEFI Secure Boot. Note que nem todos os sistemas baseados em UEFI incluem suporte para Inicialização Segura.
Pré-requisitos
Para poder assinar módulos de kernel construídos externamente, instale as utilidades listadas na tabela a seguir no sistema de construção.
Tabela 3.1. Utilidades requeridas
| Utilitário | Fornecido por pacote | Usado em | Objetivo |
|---|---|---|---|
|
|
| Construir sistema | Gera o par de chaves públicas e privadas X.509 |
|
|
| Construir sistema | Arquivo executável utilizado para assinar um módulo de kernel com a chave privada |
|
|
| Sistema alvo | Utilitário opcional usado para cadastrar manualmente a chave pública |
|
|
| Sistema alvo | Utilitário opcional usado para exibir chaves públicas no chaveiro do sistema |
O sistema de construção, onde você constrói e assina seu módulo de kernel, não precisa ter o UEFI Secure Boot habilitado e não precisa sequer ser um sistema baseado no UEFI.
3.12.1. Autenticação de módulos de kernel com chaves X.509
No RHEL 8, quando um módulo do kernel é carregado, o kernel verifica a assinatura do módulo contra as chaves públicas X.509 do chaveiro do sistema do kernel (.builtin_trusted_keys) e do chaveiro da plataforma do kernel (.platform). O chaveiro .platform contém chaves de provedores de plataformas de terceiros e chaves públicas personalizadas. As chaves do sistema do kernel .blacklist são excluídas da verificação. As seções seguintes fornecem uma visão geral das fontes de chaves, chaveiros e exemplos de chaves carregadas de diferentes fontes no sistema. Além disso, você pode ver como autenticar um módulo do kernel.
3.12.1.1. Requisitos de autenticação
Você precisa atender a certas condições para carregar módulos do núcleo em sistemas com a funcionalidade UEFI Secure Boot habilitada.
Se o UEFI Secure Boot estiver ativado ou se o parâmetro do kernel module.sig_enforce tiver sido especificado:
-
Você só pode carregar aqueles módulos de kernel assinados cujas assinaturas foram autenticadas contra chaves do chaveiro do sistema (
.builtin_trusted_keys) e do chaveiro da plataforma (.platform). -
A chave pública não deve estar no chaveiro revogado do sistema (
.blacklist).
Se o UEFI Secure Boot estiver desativado e o parâmetro do kernel module.sig_enforce não tiver sido especificado:
- Você pode carregar módulos kernel não assinados e módulos kernel assinados sem uma chave pública.
Se o sistema não for baseado na UEFI ou se a UEFI Secure Boot estiver desativada:
-
Apenas as chaves embutidas no kernel são carregadas em
.builtin_trusted_keyse.platform. - Você não tem a capacidade de aumentar esse conjunto de chaves sem reconstruir o núcleo.
Tabela 3.2. Requisitos de autenticação do módulo Kernel para carregamento
| Módulo assinado | Chave pública encontrada e assinatura válida | UEFI Secure Boot state | sig_enforce | Carga do módulo | Núcleo manchado |
|---|---|---|---|---|---|
| Não assinado | - | Não habilitado | Não habilitado | Sucesso | Sim |
| Não habilitado | Habilitado | Falhas | - | ||
| Habilitado | - | Falhas | - | ||
| Assinado | Não | Não habilitado | Não habilitado | Sucesso | Sim |
| Não habilitado | Habilitado | Falhas | - | ||
| Habilitado | - | Falhas | - | ||
| Assinado | Sim | Não habilitado | Não habilitado | Sucesso | Não |
| Não habilitado | Habilitado | Sucesso | Não | ||
| Habilitado | - | Sucesso | Não |
3.12.1.2. Fontes para chaves públicas
Durante a inicialização, o núcleo carrega chaves X.509 de um conjunto de armazéns de chaves persistentes para os seguintes chaveiros:
-
O chaveiro do sistema (
.builtin_trusted_keys) -
O chaveiro
.platform -
O sistema
.blacklistkeyring
Tabela 3.3. Fontes para chaveiros de sistema
| Fonte das chaves X.509 | O usuário pode adicionar chaves | UEFI Secure Boot state | Chaves carregadas durante a inicialização |
|---|---|---|---|
| Embutido no núcleo | Não | - |
|
| Bota Segura UEFI "db | Limitado | Não habilitado | Não |
| Habilitado |
| ||
|
Embutido no | Não | Não habilitado | Não |
| Habilitado |
| ||
| Lista de chaves do proprietário da máquina (MOK) | Sim | Não habilitado | Não |
| Habilitado |
|
.builtin_trusted_keys:
- um porta-chaves que é construído sobre o porta-chaves
- contém chaves públicas confiáveis
-
os privilégios do
rootsão necessários para visualizar as chaves
.platform:
- um porta-chaves que é construído sobre o porta-chaves
- contém chaves de fornecedores de plataformas de terceiros e chaves públicas personalizadas
-
os privilégios do
rootsão necessários para visualizar as chaves
.blacklist
- um chaveiro com chaves X.509 que foram revogadas
-
um módulo assinado por uma chave de
.blacklistfalhará a autenticação mesmo que sua chave pública esteja em.builtin_trusted_keys
UEFI Secure Boot db:
- um banco de dados de assinaturas
- armazena chaves (hashes) de aplicações UEFI, drivers UEFI, e bootloaders
- as chaves podem ser carregadas na máquina
UEFI Secure Boot dbx:
- um banco de dados de assinaturas revogado
- impede que as chaves sejam carregadas
-
as chaves revogadas deste banco de dados são adicionadas ao chaveiro
.blacklist
3.12.1.3. Geração de um par de chaves públicas e privadas
Você precisa gerar um par de chaves públicas e privadas X.509 para ter sucesso em seus esforços de usar os módulos do kernel em um sistema habilitado para Boot Seguro. Mais tarde, você usará a chave privada para assinar o módulo do kernel. Você também terá que adicionar a chave pública correspondente à Chave do Proprietário da Máquina (MOK) para o Secure Boot para validar o módulo assinado.
Alguns dos parâmetros para esta geração de pares chave são melhor especificados com um arquivo de configuração.
Procedimento
Criar um arquivo de configuração com parâmetros para a geração do par de chaves:
# cat << EOF > configuration_file.config [ req ] default_bits = 4096 distinguished_name = req_distinguished_name prompt = no string_mask = utf8only x509_extensions = myexts [ req_distinguished_name ] O = Organization CN = Organization signing key emailAddress = E-mail address [ myexts ] basicConstraints=critical,CA:FALSE keyUsage=digitalSignature subjectKeyIdentifier=hash authorityKeyIdentifier=keyid EOF
Criar um par de chaves públicas e privadas X.509, como mostrado no exemplo a seguir:
# openssl req -x509 -new -nodes -utf8 -sha256 -days 36500 \ -batch -config configuration_file.config -outform DER \ -out my_signing_key_pub.der \ -keyout my_signing_key.privA chave pública será escrita para o
my_signing_key_pub.dere a chave privada será escrita para o arquivomy_signing_key.privarquivo.ImportanteNo RHEL 8, as datas de validade do par chave são importantes. A chave não expira, mas o módulo do kernel deve ser assinado dentro do período de validade de sua chave de assinatura. Por exemplo, uma chave válida somente em 2019 pode ser usada para autenticar um módulo do kernel assinado em 2019 com essa chave. Entretanto, os usuários não podem usar essa chave para assinar um módulo de kernel em 2020.
Opcionalmente, você pode rever as datas de validade de suas chaves públicas, como no exemplo abaixo:
# openssl x509 -inform der -text -noout -in <my_signing_key_pub.der> Validity Not Before: Feb 14 16:34:37 2019 GMT Not After : Feb 11 16:34:37 2029 GMT- Inscreva sua chave pública em todos os sistemas onde você deseja autenticar e carregar seu módulo de kernel.
Aplique fortes medidas de segurança e políticas de acesso para proteger o conteúdo de sua chave privada. Nas mãos erradas, a chave poderia ser usada para comprometer qualquer sistema que seja autenticado pela chave pública correspondente.
Recursos adicionais
-
Para mais informações sobre a utilidade
openssl, consulte a página do manualopenssl(1). -
Para mais informações sobre o uso de
openssl, consulte o RHEL Security Guide - Para detalhes sobre o registro de chaves públicas em sistemas-alvo, veja Seção 3.12.3.2, “Acrescentar manualmente a chave pública à lista MOK”.
3.12.2. Exemplo de saída de chaveiros de sistema
Você pode exibir informações sobre as chaves nos chaveiros do sistema usando o utilitário keyctl.
A seguir, um exemplo abreviado de .builtin_trusted_keys, .platform e .blacklist keyrings de um sistema RHEL 8 onde o UEFI Secure Boot está habilitado.
# keyctl list %:.builtin_trusted_keys 6 keys in keyring: ...asymmetric: Red Hat Enterprise Linux Driver Update Program (key 3): bf57f3e87... ...asymmetric: Red Hat Secure Boot (CA key 1): 4016841644ce3a810408050766e8f8a29... ...asymmetric: Microsoft Corporation UEFI CA 2011: 13adbf4309bd82709c8cd54f316ed... ...asymmetric: Microsoft Windows Production PCA 2011: a92902398e16c49778cd90f99e... ...asymmetric: Red Hat Enterprise Linux kernel signing key: 4249689eefc77e95880b... ...asymmetric: Red Hat Enterprise Linux kpatch signing key: 4d38fd864ebe18c5f0b7... # keyctl list %:.platform 4 keys in keyring: ...asymmetric: VMware, Inc.: 4ad8da0472073... ...asymmetric: Red Hat Secure Boot CA 5: cc6fafe72... ...asymmetric: Microsoft Windows Production PCA 2011: a929f298e1... ...asymmetric: Microsoft Corporation UEFI CA 2011: 13adbf4e0bd82... # keyctl list %:.blacklist 4 keys in keyring: ...blacklist: bin:f5ff83a... ...blacklist: bin:0dfdbec... ...blacklist: bin:38f1d22... ...blacklist: bin:51f831f...
O chaveiro .builtin_trusted_keys acima mostra a adição de duas chaves do Boot Seguro da UEFI {\i1}"db{\i} assim como o Red Hat Secure Boot (CA key 1), que está embutido no carregador de inicialização shim.efi.
O exemplo a seguir mostra a saída do console do kernel. As mensagens identificam as chaves com uma fonte relacionada ao UEFI Secure Boot. Estas incluem a UEFI Secure Boot db, calço embutido e a lista MOK.
# dmesg | grep 'EFI: Loaded cert'
[5.160660] EFI: Loaded cert 'Microsoft Windows Production PCA 2011: a9290239...
[5.160674] EFI: Loaded cert 'Microsoft Corporation UEFI CA 2011: 13adbf4309b...
[5.165794] EFI: Loaded cert 'Red Hat Secure Boot (CA key 1): 4016841644ce3a8...Recursos adicionais
-
Para mais informações sobre
keyctlvejakeyctl(1)página do manual. -
Para mais informações sobre
dmesgvejadmesg(1)página do manual.
3.12.3. Inscrição de chave pública no sistema alvo
Quando a RHEL 8 inicializa em um sistema baseado em UEFI com boot seguro ativado, o kernel carrega no chaveiro do sistema (.builtin_trusted_keys) todas as chaves públicas que estão no banco de dados de chaves Secure Boot db. Ao mesmo tempo, o kernel exclui as chaves do banco de dados dbx de chaves revogadas. As seções abaixo descrevem diferentes maneiras de importar uma chave pública em um sistema alvo para que o chaveiro do sistema (.builtin_trusted_keys) seja capaz de usar a chave pública para autenticar um módulo do kernel.
3.12.3.1. Imagem do firmware de fábrica incluindo chave pública
Para facilitar a autenticação de seu módulo de kernel em seus sistemas, considere solicitar a seu fornecedor de sistemas que incorpore sua chave pública no banco de dados de chaves UEFI Secure Boot em sua imagem de firmware de fábrica.
3.12.3.2. Acrescentar manualmente a chave pública à lista MOK
O recurso de chave do proprietário da máquina (MOK) pode ser usado para expandir o banco de dados de chaves de Boot Seguro da UEFI. Quando a RHEL 8 inicializa um sistema UEFI com boot seguro ativado, as chaves da lista MOK também são adicionadas ao chaveiro do sistema (.builtin_trusted_keys), além das chaves do banco de dados de chaves. As chaves da lista MOK também são armazenadas de forma persistente e segura da mesma forma que as chaves do banco de dados do Secure Boot, mas estas são duas facilidades separadas. A instalação MOK é suportada por shim.efi, MokManager.efi, grubx64.efi, e pelo utilitário mokutil.
A inscrição de uma chave MOK requer a interação manual de um usuário no console do sistema UEFI em cada sistema alvo. Entretanto, a instalação MOK fornece um método conveniente para testar os pares de chaves recém-gerados e testar os módulos do kernel assinados com eles.
Procedimento
Solicite a adição de sua chave pública à lista MOK:
# mokutil --import my_signing_key_pub.derVocê será solicitado a entrar e confirmar uma senha para este pedido de inscrição MOK.
Reinicialize a máquina.
O pedido de inscrição da chave MOK pendente será notado por
shim.efie será lançadoMokManager.efipara permitir que você complete a inscrição a partir do console UEFI.Digite a senha que você associou anteriormente a esta solicitação e confirme a matrícula.
Sua chave pública é adicionada à lista MOK, que é persistente.
Assim que uma chave estiver na lista MOK, ela será automaticamente propagada para o chaveiro do sistema neste e nas botas subseqüentes quando a UEFI Secure Boot estiver habilitada.
3.12.4. Assinatura de módulos de kernel com a chave privada
Os usuários podem obter maiores benefícios de segurança em seus sistemas carregando módulos de kernel assinados se o mecanismo UEFI Secure Boot estiver habilitado. As seções seguintes descrevem como assinar módulos de kernel com a chave privada.
Pré-requisitos
- Você gerou um par de chaves públicas e privadas e conhece as datas de validade de suas chaves públicas. Para maiores detalhes, veja Seção 3.12.1.3, “Geração de um par de chaves públicas e privadas”.
- Você cadastrou sua chave pública no sistema alvo. Para maiores detalhes, veja Seção 3.12.3, “Inscrição de chave pública no sistema alvo”.
- Você tem um módulo de kernel em formato de imagem ELF disponível para assinatura.
Procedimento
Executar o utilitário
sign-filecom parâmetros como mostrado no exemplo abaixo:# /usr/src/kernels/$(uname -r)/scripts/sign-file \ sha256 \ my_signing_key.priv \ my_signing_key_pub.der \ my_module.kosign-filecomputa e anexa a assinatura diretamente à imagem ELF em seu arquivo de módulo do kernel. O utilitáriomodinfopode ser usado para exibir informações sobre a assinatura do módulo do kernel, caso ele esteja presente.NotaA assinatura anexa não está contida em uma seção de imagem ELF e não é uma parte formal da imagem ELF. Portanto, utilitários como
readelfnão serão capazes de exibir a assinatura em seu módulo do núcleo.Seu módulo de núcleo está agora pronto para ser carregado. Note que seu módulo de kernel assinado também é carregável em sistemas onde o UEFI Secure Boot está desabilitado ou em um sistema não UEFI. Isso significa que você não precisa fornecer tanto uma versão assinada como uma não assinada de seu módulo de kernel.
ImportanteNo RHEL 8, as datas de validade do par chave são importantes. A chave não expira, mas o módulo do kernel deve ser assinado dentro do período de validade de sua chave de assinatura. O utilitário
sign-filenão o advertirá sobre isso. Por exemplo, uma chave que só é válida em 2019 pode ser usada para autenticar um módulo do kernel assinado em 2019 com essa chave. Entretanto, os usuários não podem usar essa chave para assinar um módulo de kernel em 2020.
Recursos adicionais
-
Para obter detalhes sobre o uso do
modinfopara obter informações sobre os módulos do kernel, veja Seção 3.7, “Exibição de informações sobre os módulos do kernel”.
3.12.5. Carregamento de módulos de núcleo assinado
Uma vez que sua chave pública esteja inscrita no chaveiro do sistema (.builtin_trusted_keys) e na lista MOK, e após ter assinado o respectivo módulo kernel com sua chave privada, você pode finalmente carregar seu módulo kernel assinado com o comando modprobe, conforme descrito na seção seguinte.
Pré-requisitos
- Você gerou o par de chaves públicas e privadas. Para maiores detalhes, veja Seção 3.12.1.3, “Geração de um par de chaves públicas e privadas”.
- Você cadastrou a chave pública no chaveiro do sistema. Para maiores detalhes, veja Seção 3.12.3.2, “Acrescentar manualmente a chave pública à lista MOK”.
- Você assinou um módulo de kernel com a chave privada. Para maiores detalhes, veja Seção 3.12.4, “Assinatura de módulos de kernel com a chave privada”.
Procedimento
Verifique se suas chaves públicas estão no chaveiro do sistema:
# keyctl list %:.builtin_trusted_keysCopie o módulo do kernel para o diretório
/extra/do kernel que você deseja:# cp my_module.ko /lib/modules/$(uname -r)/extra/Atualizar a lista de dependência modular:
# depmod -aCarregar o módulo de kernel e verificar se foi carregado com sucesso:
# modprobe -v my_module # lsmod | grep my_module
Opcionalmente, para carregar o módulo na inicialização, adicione-o ao arquivo
/etc/modules-loaded.d/my_module.conf:# echo "my_module" > /etc/modules-load.d/my_module.conf
Recursos adicionais
- Para maiores informações sobre módulos de carregamento de kernel, veja as seções relevantes de Capítulo 3, Gerenciando módulos do núcleo.
Capítulo 4. Configuração dos parâmetros de linha de comando do kernel
Os parâmetros da linha de comando do kernel são uma forma de alterar o comportamento de certos aspectos do kernel do Red Hat Enterprise Linux no momento da inicialização. Como administrador de sistemas, você tem controle total sobre quais opções são definidas no momento da inicialização. Certos comportamentos do kernel só podem ser definidos no momento da inicialização, portanto, entender como fazer estas mudanças é uma habilidade chave de administração.
Optar por mudar o comportamento do sistema modificando os parâmetros da linha de comando do kernel pode ter efeitos negativos em seu sistema. Portanto, você deve testar as mudanças antes de implementá-las na produção. Para maiores orientações, entre em contato com o Suporte da Red Hat.
4.1. Entendendo os parâmetros da linha de comando do kernel
Os parâmetros da linha de comando do kernel são usados para a configuração do tempo de inicialização:
- O núcleo do Red Hat Enterprise Linux
- O disco RAM inicial
- As características do espaço do usuário
Os parâmetros de tempo de inicialização do kernel são freqüentemente usados para sobrescrever valores padrão e para definir configurações de hardware específicas.
Por padrão, os parâmetros de linha de comando do kernel para sistemas que utilizam o carregador de inicialização GRUB2 são definidos na variável kernelopts do arquivo /boot/grub2/grubenv para todas as entradas de inicialização do kernel.
Para IBM Z, os parâmetros da linha de comando do kernel são armazenados no arquivo de configuração de entrada de inicialização porque o carregador de inicialização zipl não suporta variáveis de ambiente. Portanto, a variável de ambiente kernelopts não pode ser usada.
Recursos adicionais
-
Para mais informações sobre quais parâmetros de linha de comando do kernel você pode modificar, veja
kernel-command-line(7),bootparam(7)edracut.cmdline(7)páginas de manual. -
Para mais informações sobre a variável
kernelopts, veja o artigo da base de conhecimento, Como instalar e inicializar kernels personalizados no Red Hat Enterprise Linux 8.
4.2. O que é
grubby é um utilitário para manipulação de arquivos de configuração específicos do bootloader.
Você pode usar grubby também para alterar a entrada padrão do boot, e para adicionar/remover argumentos de uma entrada do menu GRUB2.
Para obter mais detalhes, consulte a página do manual grubby(8).
4.3. O que são entradas de inicialização
Uma entrada de inicialização é uma coleção de opções que são armazenadas em um arquivo de configuração e vinculadas a uma versão particular do kernel. Na prática, você tem pelo menos tantas entradas de inicialização quanto seu sistema tem kernels instalados. O arquivo de configuração da entrada de inicialização está localizado no diretório /boot/loader/entries/ e pode se parecer com este:
6f9cc9cb7d7845d49698c9537337cedc-4.18.0-5.el8.x86_64.conf
O nome do arquivo acima consiste de uma identificação de máquina armazenada no arquivo /etc/machine-id, e uma versão do kernel.
O arquivo de configuração de entrada de inicialização contém informações sobre a versão do kernel, a imagem ramdisk inicial e a variável de ambiente kernelopts, que contém os parâmetros da linha de comando do kernel. O conteúdo de uma configuração de entrada de inicialização pode ser visto abaixo:
title Red Hat Enterprise Linux (4.18.0-74.el8.x86_64) 8.0 (Ootpa) version 4.18.0-74.el8.x86_64 linux /vmlinuz-4.18.0-74.el8.x86_64 initrd /initramfs-4.18.0-74.el8.x86_64.img $tuned_initrd options $kernelopts $tuned_params id rhel-20190227183418-4.18.0-74.el8.x86_64 grub_users $grub_users grub_arg --unrestricted grub_class kernel
A variável de ambiente kernelopts está definida no arquivo /boot/grub2/grubenv.
Recursos adicionais
Para mais informações sobre a variável kernelopts, veja o artigo da base de conhecimento Como instalar e inicializar kernels personalizados no Red Hat Enterprise Linux 8.
4.4. Ajuste dos parâmetros da linha de comando do kernel
Para ajustar o comportamento de seu sistema desde os estágios iniciais do processo de inicialização, você precisa definir certos parâmetros de linha de comando do kernel.
Esta seção explica como alterar os parâmetros da linha de comando do kernel em várias arquiteturas de CPU.
4.4.1. Mudança dos parâmetros de linha de comando do kernel para todas as entradas de inicialização
Este procedimento descreve como alterar os parâmetros de linha de comando do kernel para todas as entradas de inicialização em seu sistema.
Pré-requisitos
-
Verifique se as utilidades
grubbyeziplestão instaladas em seu sistema.
Procedimento
Para adicionar um parâmetro:
# grubby --update-kernel=ALL --args="<NEW_PARAMETER>"Para sistemas que utilizam o bootloader GRUB2, o comando atualiza o arquivo
/boot/grub2/grubenvadicionando um novo parâmetro do kernel à variávelkerneloptsnesse arquivo.No IBM Z que usa o bootloader zIPL, o comando adiciona um novo parâmetro de kernel a cada
/boot/loader/entries/<ENTRY>.confarquivo.-
No IBM Z, execute o comando
ziplsem opções de atualização do menu de inicialização.
-
No IBM Z, execute o comando
Para remover um parâmetro:
# grubby --update-kernel=ALL --remove-args="<PARAMETER_TO_REMOVE>"-
No IBM Z, execute o comando
ziplsem opções de atualização do menu de inicialização.
-
No IBM Z, execute o comando
Recursos adicionais
- Para mais informações sobre os parâmetros da linha de comando do kernel, veja Seção 4.1, “Entendendo os parâmetros da linha de comando do kernel”.
-
Para informações sobre a utilidade
grubby, consulte a página do manualgrubby(8). -
Para mais exemplos sobre como usar
grubby, veja o grubby tool. -
Para informações sobre a utilidade
zipl, consulte a página do manualzipl(8).
4.4.2. Alteração dos parâmetros da linha de comando do kernel para uma única entrada de inicialização
Este procedimento descreve como alterar os parâmetros da linha de comando do kernel para uma única entrada de inicialização em seu sistema.
Pré-requisitos
-
Verifique se as utilidades
grubbyeziplestão instaladas em seu sistema.
Procedimento
Para adicionar um parâmetro:
# grubby --update-kernel=/boot/vmlinuz-$(uname -r) --args="<NEW_PARAMETER>"-
No IBM Z, execute o comando
ziplsem opções de atualização do menu de inicialização.
-
No IBM Z, execute o comando
Para remover um parâmetro, use o seguinte:
# grubby --update-kernel=/boot/vmlinuz-$(uname -r) --remove-args="<PARAMETER_TO_REMOVE>"-
No IBM Z, execute o comando
ziplsem opções de atualização do menu de inicialização.
-
No IBM Z, execute o comando
Nos sistemas que utilizam o arquivo grub.cfg, existe, por padrão, o parâmetro options para cada entrada de inicialização do kernel, que é definido para a variável kernelopts. Esta variável é definida no arquivo de configuração /boot/grub2/grubenv.
Nos sistemas GRUB2:
-
Se os parâmetros da linha de comando do kernel forem modificados para todas as entradas de inicialização, o utilitário
grubbyatualiza a variávelkerneloptsno arquivo/boot/grub2/grubenv. -
Se os parâmetros da linha de comando do kernel forem modificados para uma única entrada de inicialização, a variável
kerneloptsé expandida, os parâmetros do kernel são modificados e o valor resultante é armazenado no arquivo/boot/loader/entries/<RELEVANT_KERNEL_BOOT_ENTRY.conf>da respectiva entrada de inicialização.
Em sistemas zIPL:
-
grubbymodifica e armazena os parâmetros da linha de comando do kernel de uma entrada de inicialização individual do kernel no/boot/loader/entries/<ENTRY>.confarquivo.
Recursos adicionais
- Para mais informações sobre os parâmetros da linha de comando do kernel, veja Seção 4.1, “Entendendo os parâmetros da linha de comando do kernel”.
-
Para informações sobre a utilidade
grubby, consulte a página do manualgrubby(8). -
Para mais exemplos sobre como usar
grubby, veja o grubby tool. -
Para informações sobre a utilidade
zipl, consulte a página do manualzipl(8).
Capítulo 5. Configuração dos parâmetros do kernel em tempo de execução
Como administrador de sistemas, você pode modificar muitas facetas do comportamento do kernel do Red Hat Enterprise Linux em tempo de execução. Esta seção descreve como configurar os parâmetros do kernel em tempo de execução, usando o comando sysctl e modificando os arquivos de configuração nos diretórios /etc/sysctl.d/ e /proc/sys/.
5.1. O que são parâmetros do kernel
Os parâmetros do kernel são valores ajustáveis que você pode ajustar enquanto o sistema está em funcionamento. Não há necessidade de reiniciar ou recompilar o kernel para que as mudanças tenham efeito.
É possível abordar os parâmetros do kernel através:
-
O comando
sysctl -
O sistema de arquivo virtual montado no diretório
/proc/sys/ -
Os arquivos de configuração no diretório
/etc/sysctl.d/
Os túneis são divididos em classes pelo subsistema de kernel. O Red Hat Enterprise Linux tem as seguintes classes sintonizáveis:
Tabela 5.1. Tabela de classes de sysctl
| Classe sintonizável | Subsistema |
|---|---|
| abi | Domínios e personalidades de execução |
| crypto | Interfaces criptográficas |
| debug | Interfaces de depuração do kernel |
| dev | Informações específicas sobre os dispositivos |
| fs | Sintonizáveis globais e específicos do sistema de arquivo |
| kernel | Sintonizadores globais de kernel |
| net | Sintonizadores de rede |
| sunrpc | Chamada de Procedimento Remoto do Sol (NFS) |
| usuário | Limites do espaço de nomes de usuários |
| vm | Afinação e gerenciamento de memória, buffers e cache |
Recursos adicionais
-
Para mais informações sobre
sysctl, consulte as páginas do manualsysctl(8). -
Para mais informações sobre
/etc/sysctl.d/veja,sysctl.d(5)páginas do manual.
5.2. Ajuste dos parâmetros do núcleo em tempo de execução
A configuração dos parâmetros do kernel em um sistema de produção requer um planejamento cuidadoso. Alterações não planejadas podem tornar o kernel instável, exigindo uma reinicialização do sistema. Verifique se você está usando opções válidas antes de alterar quaisquer valores do kernel.
5.2.1. Configuração temporária dos parâmetros do kernel com sysctl
O procedimento a seguir descreve como usar o comando sysctl para definir temporariamente os parâmetros do kernel em tempo de execução. O comando também é útil para listar e filtrar os sintonizadores.
Pré-requisitos
- Introdução aos parâmetros do Kernel
- Permissões de raiz
Procedimento
Para listar todos os parâmetros e seus valores, use o seguinte:
# sysctl -aNotaO comando
# sysctl -aexibe os parâmetros do kernel, que podem ser ajustados em tempo de execução e em tempo de inicialização.Para configurar um parâmetro temporariamente, use o comando como no exemplo a seguir:
# sysctl <TUNABLE_CLASS>.<PARAMETER>=<TARGET_VALUE>O comando de amostra acima altera o valor do parâmetro enquanto o sistema está em funcionamento. As mudanças entram em vigor imediatamente, sem necessidade de reiniciar.
NotaAs mudanças retornam ao padrão após o reinício de seu sistema.
Recursos adicionais
-
Para mais informações sobre
sysctl, consulte a página do manualsysctl(8). -
Para modificar permanentemente os parâmetros do kernel, use o comando
sysctlpara escrever os valores no arquivo/etc/sysctl.confou faça alterações manuais nos arquivos de configuração no diretório/etc/sysctl.d/.
5.2.2. Configuração permanente dos parâmetros do kernel com sysctl
O procedimento a seguir descreve como usar o comando sysctl para definir permanentemente os parâmetros do kernel.
Pré-requisitos
- Introdução aos parâmetros do Kernel
- Permissões de raiz
Procedimento
Para listar todos os parâmetros, use o seguinte:
# sysctl -aO comando exibe todos os parâmetros do kernel que podem ser configurados em tempo de execução.
Para configurar um parâmetro permanentemente:
# sysctl -w <TUNABLE_CLASS>.<PARAMETER>=<TARGET_VALUE> >> /etc/sysctl.confO comando de amostra altera o valor sintonizável e o grava no arquivo
/etc/sysctl.conf, que sobrepõe os valores padrão dos parâmetros do kernel. As mudanças entram em vigor imediata e persistentemente, sem necessidade de reinício.
Para modificar permanentemente os parâmetros do kernel, você também pode fazer alterações manuais nos arquivos de configuração no diretório /etc/sysctl.d/.
Recursos adicionais
-
Para mais informações sobre
sysctl, consulte as páginas do manualsysctl(8)esysctl.conf(5). -
Para maiores informações sobre o uso dos arquivos de configuração no diretório
/etc/sysctl.d/para fazer mudanças permanentes nos parâmetros do kernel, veja Usando arquivos de configuração em /etc/sysctl.d/ para ajustar os parâmetros do kernel.
5.2.3. Usando arquivos de configuração em /etc/sysctl.d/ para ajustar os parâmetros do kernel
O procedimento seguinte descreve como modificar manualmente os arquivos de configuração no diretório /etc/sysctl.d/ para definir permanentemente os parâmetros do kernel.
Pré-requisitos
- Introdução aos parâmetros do Kernel
- Permissões de raiz
Procedimento
Criar um novo arquivo de configuração em
/etc/sysctl.d/:# vim /etc/sysctl.d/<some_file.conf>Incluir parâmetros de kernel, um por linha, como se segue:
<TUNABLE_CLASS>.<PARAMETER>=<TARGET_VALUE><TUNABLE_CLASS>.<PARAMETER>=<TARGET_VALUE>- Salvar o arquivo de configuração.
Reinicie a máquina para que as mudanças entrem em vigor.
Alternativamente, para aplicar as mudanças sem reiniciar, executar:
# sysctl -p /etc/sysctl.d/<some_file.conf>O comando permite a leitura dos valores do arquivo de configuração, que você criou anteriormente.
Recursos adicionais
-
Para mais informações sobre
sysctl, consulte a página do manualsysctl(8). -
Para mais informações sobre
/etc/sysctl.d/, consulte a página do manualsysctl.d(5).
5.2.4. Configuração temporária dos parâmetros do kernel através de /proc/sys/
O procedimento a seguir descreve como definir temporariamente os parâmetros do kernel através dos arquivos no diretório /proc/sys/ do sistema de arquivos virtual.
Pré-requisitos
- Introdução aos parâmetros do Kernel
- Permissões de raiz
Procedimento
Identificar um parâmetro do kernel que você deseja configurar:
# ls -l /proc/sys/<TUNABLE_CLASS>/Os arquivos graváveis retornados pelo comando podem ser usados para configurar o kernel. Os arquivos com permissões somente de leitura fornecem feedback sobre as configurações atuais.
Atribuir um valor-alvo ao parâmetro kernel:
# echo <TARGET_VALUE> > /proc/sys/<TUNABLE_CLASS>/<PARAMETER>O comando faz mudanças de configuração que desaparecerão assim que o sistema for reiniciado.
Opcionalmente, verifique o valor do parâmetro do kernel recém ajustado:
# cat /proc/sys/<TUNABLE_CLASS>/<PARAMETER>
Recursos adicionais
-
Para modificar permanentemente os parâmetros do kernel, use o comando
sysctlou faça alterações manuais nos arquivos de configuração no diretório/etc/sysctl.d/.
5.3. Manter os parâmetros de pânico do núcleo desabilitados em ambientes virtualizados
Ao configurar um ambiente virtualizado no Red Hat Enterprise Linux 8 (RHEL 8), você não deve ativar os parâmetros do kernel softlockup_panic e nmi_watchdog, pois o ambiente virtualizado pode desencadear um bloqueio suave espúrio que não deve exigir um pânico do sistema.
As seções seguintes explicam as razões por trás deste conselho, resumindo-as:
- O que causa um bloqueio suave.
- Descrevendo os parâmetros de kernel que controlam o comportamento de um sistema em um bloqueio suave.
- Explicando como os bloqueios suaves podem ser acionados em um ambiente virtualizado.
5.3.1. O que é um bloqueio suave?
Um bloqueio suave é uma situação geralmente causada por um bug, quando uma tarefa é executada no espaço do kernel de uma CPU sem reprogramação. A tarefa também não permite que nenhuma outra tarefa seja executada naquela CPU em particular. Como resultado, um aviso é exibido a um usuário através do console do sistema. Este problema também é chamado de disparo de travamento suave.
Recursos adicionais
- Por uma razão técnica por trás de um bloqueio suave, exemplos de mensagens de registro, e outros detalhes, veja o seguinte Knowledge Article.
5.3.2. Parâmetros que controlam o pânico no núcleo
Os seguintes parâmetros do núcleo podem ser definidos para controlar o comportamento de um sistema quando um bloqueio suave é detectado.
- softlockup_panic
Controla se o núcleo entra ou não em pânico quando um bloqueio suave é detectado.
Tipo Valor Efeito Inteiro
0
o kernel não entra em pânico com fechadura macia
Inteiro
1
pânico no miolo em um bloqueio macio
Por padrão, na RHEL8 este valor é 0.
A fim de entrar em pânico, o sistema precisa detectar primeiro um bloqueio duro. A detecção é controlada pelo parâmetro
nmi_watchdog.- nmi_watchdog
Controla se os mecanismos de detecção de lockup (
watchdogs) estão ativos ou não. Este parâmetro é do tipo inteiro.Valor Efeito 0
desabilita o detector de bloqueio
1
permite o bloqueio do detector
O detector de travamento rígido monitora cada CPU quanto à sua capacidade de responder a interrupções.
- watchdog_thresh
Controla a freqüência do cão de guarda
hrtimer, eventos NMI, e limiares de bloqueio suave/duro.Limite por defeito Limiar de bloqueio suave 10 segundos
2 *
watchdog_threshA definição deste parâmetro para zero desabilita totalmente a detecção de bloqueio.
Recursos adicionais
-
Para maiores informações sobre
nmi_watchdogesoftlockup_panic, veja o Softlockup detector and hardlockup detector documento. -
Para mais detalhes sobre
watchdog_thresh, veja o Kernel sysctl documento.
5.3.3. Trancamentos suaves e espúrios em ambientes virtualizados
O travamento suave acionado em hosts físicos, como descrito em Seção 5.3.1, “O que é um bloqueio suave?”, geralmente representa um kernel ou bug de hardware. O mesmo fenômeno que ocorre em sistemas operacionais convidados em ambientes virtualizados pode representar um falso aviso.
A carga de trabalho pesada sobre um host ou a alta contenção sobre algum recurso específico, como a memória, geralmente causa um falso disparo de um cadeado macio. Isto porque o anfitrião pode programar a CPU do convidado por um período superior a 20 segundos. Então, quando a CPU do convidado é novamente programada para rodar no host, ela experimenta um time jump que aciona os devidos temporizadores. Os temporizadores incluem também o watchdog hrtimer, que pode conseqüentemente reportar um travamento suave na CPU do convidado.
Como um bloqueio suave em um ambiente virtualizado pode ser espúrio, você não deve ativar os parâmetros do kernel que causariam pânico no sistema quando um bloqueio suave for reportado em uma CPU de convidado.
Para entender os trancamentos suaves nos hóspedes, é essencial saber que o anfitrião agenda o hóspede como uma tarefa, e o hóspede então agenda suas próprias tarefas.
Recursos adicionais
- Para definição de bloqueio suave e aspectos técnicos por trás de seu funcionamento, ver Seção 5.3.1, “O que é um bloqueio suave?”.
- Para aprender sobre os componentes dos ambientes virtualizados RHEL 8 e sua interação, veja RHEL 8 virtual machine components and their interaction.
5.4. Ajuste dos parâmetros do kernel para servidores de banco de dados
Existem diferentes conjuntos de parâmetros de kernel que podem afetar o desempenho de aplicações específicas de bancos de dados. As seções seguintes explicam quais parâmetros do kernel devem ser configurados para garantir o funcionamento eficiente dos servidores de banco de dados e das bases de dados.
5.4.1. Introdução aos servidores de banco de dados
Um servidor de banco de dados é um dispositivo de hardware que tem uma certa quantidade de memória principal, e um aplicativo de banco de dados (DB) instalado. Esta aplicação DB fornece serviços como um meio de escrever os dados em cache da memória principal, que normalmente é pequena e cara, para arquivos DB (banco de dados). Estes serviços são fornecidos a vários clientes em uma rede. Pode haver tantos servidores de banco de dados quanto a memória principal de uma máquina e o armazenamento permitem.
O Red Hat Enterprise Linux 8 fornece as seguintes aplicações de banco de dados:
- MariaDB 10.3
- MySQL 8.0
- PostgreSQL 10
- PostgreSQL 9.6
- PostgreSQL 12 - disponível desde RHEL 8.1.1
5.4.2. Parâmetros que afetam o desempenho das aplicações de banco de dados
Os seguintes parâmetros do kernel afetam o desempenho das aplicações de banco de dados.
- fs.aio-max-nr
Define o número máximo de operações assíncronas de E/S que o sistema pode realizar no servidor.
NotaO aumento do parâmetro
fs.aio-max-nrnão produz mudanças adicionais além do aumento do limite do aio.- fs.file-max
Define o número máximo de manipulações de arquivos (nomes de arquivos temporários ou IDs atribuídos a arquivos abertos) que o sistema suporta em qualquer instância.
O kernel aloca dinamicamente as alças dos arquivos sempre que uma alça de arquivo é solicitada por uma aplicação. O kernel, no entanto, não libera esses manipuladores de arquivos quando eles são liberados pela aplicação. Em vez disso, o kernel recicla estes manipuladores de arquivos. Isto significa que, com o tempo, o número total de file handles alocados aumentará mesmo que o número de file handles usados atualmente possa ser baixo.
- kernel.shmall
-
Define o número total de páginas de memória compartilhada que podem ser usadas em todo o sistema. Para utilizar toda a memória principal, o valor do parâmetro
kernel.shmalldeve ser ≤ tamanho total da memória principal. - kernel.shmmax
- Define o tamanho máximo em bytes de um único segmento de memória compartilhada que um processo Linux pode alocar em seu espaço de endereçamento virtual.
- kernel.shmmni
- Define o número máximo de segmentos de memória compartilhada que o servidor de banco de dados é capaz de lidar.
- net.ipv4.ip_local_port_range
- Define a faixa de porta que o sistema pode usar para programas que desejam se conectar a um servidor de banco de dados sem um número de porta específico.
- net.core.rmem_default
- Define a memória padrão do soquete de recepção através do Protocolo de Controle de Transmissão (TCP).
- net.core.rmem_max
- Define a memória máxima do soquete de recepção através do Protocolo de Controle de Transmissão (TCP).
- net.core.wmem_default
- Define a memória padrão do soquete de envio através do Protocolo de Controle de Transmissão (TCP).
- net.core.wmem_max
- Define a memória máxima do soquete de envio através do Protocolo de Controle de Transmissão (TCP).
- vm.dirty_bytes / vm.dirty_ratio
-
Define um limite em bytes / em porcentagem de memória suja na qual um processo gerando dados sujos é iniciado na função
write().
Either vm.dirty_bytes or vm.dirty_ratio pode ser especificado de cada vez.
- vm.dirty_background_bytes / vm.dirty_background_ratio
- Define um limite em bytes / em porcentagem de memória suja em que o kernel tenta escrever ativamente dados sujos no disco rígido.
Either vm.dirty_background_bytes or vm.dirty_background_ratio pode ser especificado de cada vez.
- vm.dirty_writeback_centisecs
Define um intervalo de tempo entre os despertares periódicos dos fios do núcleo responsáveis pela escrita de dados sujos no disco rígido.
Estes parâmetros de kernel medem em 100º de um segundo.
- vm.dirty_expire_centisecs
Define o tempo após o qual os dados sujos são suficientemente velhos para serem escritos em disco rígido.
Estes parâmetros de kernel medem em 100º de um segundo.
Recursos adicionais
- Para obter explicações sobre os dados sujos, como funcionam e quais os parâmetros do núcleo que se relacionam com eles, veja o Dirty pagecache writeback and vm.dirty parameters documento.
Capítulo 6. Começando com o registro do kernel
Arquivos de log são arquivos que contêm mensagens sobre o sistema, incluindo o kernel, serviços e aplicações em execução no mesmo. O sistema de registro no Red Hat Enterprise Linux é baseado no protocolo syslog embutido. Vários utilitários usam este sistema para registrar eventos e organizá-los em arquivos de log. Estes arquivos são úteis ao auditar o sistema operacional ou solucionar problemas.
6.1. O que é o tampão de anel de amêndoa
Durante o processo de inicialização, o console fornece muitas informações importantes sobre a fase inicial da inicialização do sistema. Para evitar a perda das mensagens iniciais, o kernel utiliza o que é chamado de buffer de anel. Este buffer armazena todas as mensagens, inclusive as mensagens de inicialização, geradas pela função printk() dentro do código do kernel. As mensagens do buffer de anéis do kernel são então lidas e armazenadas em arquivos de log em armazenamento permanente, por exemplo, pelo serviço syslog.
O buffer mencionado acima é uma estrutura de dados cíclica que tem um tamanho fixo, e é codificada no núcleo. Os usuários podem exibir os dados armazenados no buffer de anel do kernel através do comando dmesg ou do arquivo /var/log/boot.log. Quando o buffer de anéis está cheio, os novos dados sobrescrevem os antigos.
Recursos adicionais
-
Para mais informações sobre
syslog, consulte a página do manualsyslog(2). -
Para mais detalhes sobre como examinar ou controlar as mensagens de registro de inicialização com
dmesg, consulte a página do manualdmesg(1).
6.2. Papel da impressão em nível de log e kernel logging
Cada mensagem que o kernel reporta tem um nível de log associado a ela que define a importância da mensagem. O buffer de anel do kernel, conforme descrito em Seção 6.1, “O que é o tampão de anel de amêndoa”, coleta mensagens do kernel de todos os níveis de log. É o parâmetro kernel.printk que define quais mensagens do buffer são impressas para o console.
Os valores em nível de log se decompõem nesta ordem:
- 0 - Emergência do núcleo. O sistema é inutilizável.
- 1 - Alerta de kernel. As ações devem ser tomadas imediatamente.
- 2 - A condição do miolo é considerada crítica.
- 3 - Condição de erro geral do kernel.
- 4 - Condição geral de alerta do núcleo.
- 5 - Aviso de uma condição normal, mas significativa.
- 6 - Mensagem informativa do kernel.
- 7 - Mensagens de nível de depuração do kernel.
Por padrão, kernel.printk no RHEL 8 contém os quatro valores a seguir:
# sysctl kernel.printk
kernel.printk = 7 4 1 7Os quatro valores definem o seguinte:
- valor. O nível de log do console, define a prioridade mais baixa de mensagens impressas no console.
- valor. Nível de registro padrão para mensagens sem um nível de registro explícito anexado a elas.
- valor. Define a configuração mais baixa possível do nível de log para o nível de log do console.
valor. Define o valor padrão para o nível de log do console no momento da inicialização.
Cada um desses valores acima define uma regra diferente para o tratamento de mensagens de erro.
O valor padrão 7 4 1 7 printk permite uma melhor depuração da atividade do kernel. Entretanto, quando acoplado a um console serial, esta configuração printk é capaz de causar explosões intensas de E/S que podem levar a um sistema RHEL a ficar temporariamente sem resposta. Para evitar estas situações, a configuração de um valor printk de 4 4 1 7 normalmente funciona, mas às custas de perder a informação extra de depuração.
Observe também que certos parâmetros de linha de comando do kernel, tais como quiet ou debug, alteram os valores padrão kernel.printk.
Recursos adicionais
-
Para mais informações sobre
kernel.printke níveis de log, consulte a página do manualsyslog(2).
Capítulo 7. Instalando e configurando o kdump
7.1. O que é kdump
kdump é um serviço que fornece um mecanismo de despejo de emergência. O serviço permite salvar o conteúdo da memória do sistema para análise posterior. kdump usa a chamada do sistema kexec para inicializar no segundo kernel (a capture kernel) sem reinicializar; e então captura o conteúdo da memória do kernel travado (a crash dump ou a vmcore) e o salva. O segundo kernel reside em uma parte reservada da memória do sistema.
Um despejo de kernel pode ser a única informação disponível no caso de uma falha no sistema (um bug crítico). Portanto, garantir que kdump esteja operacional é importante em ambientes de missão crítica. A Red Hat recomenda que os administradores de sistema atualizem e testem regularmente kexec-tools em seu ciclo normal de atualização do kernel. Isto é especialmente importante quando novos recursos do kernel são implementados.
7.2. Instalando o kdump
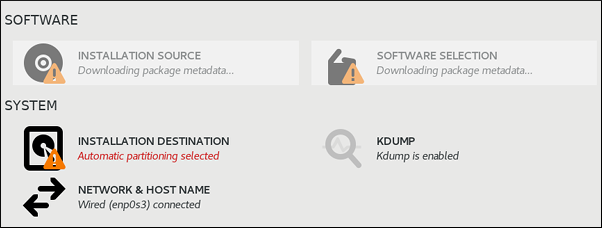
Em muitos casos, o serviço kdump é instalado e ativado por default nas novas instalações do Red Hat Enterprise Linux. O Anaconda o instalador fornece uma tela para a configuração kdump ao realizar uma instalação interativa usando a interface gráfica ou de texto. A tela do instalador tem o título Kdump e está disponível na tela principal Installation Summary, e permite apenas uma configuração limitada - você só pode selecionar se kdump está habilitado e quanta memória está reservada.
Algumas opções de instalação, tais como instalações Kickstart personalizadas, em alguns casos não instalam ou ativam kdump por padrão. Se este for o caso em seu sistema, siga o procedimento abaixo para instalar kdump.
Pré-requisitos
- Uma assinatura ativa do Red Hat Enterprise Linux
- Um repositório contendo o kexec-tools pacote para a arquitetura da CPU de seu sistema
-
Cumpridos os requisitos
kdump
Procedimento
Execute o seguinte comando para verificar se
kdumpestá instalado em seu sistema:$ rpm -q kexec-toolsSaída se o pacote for instalado:
kexec-tools-2.0.17-11.el8.x86_64Saída se o pacote não estiver instalado:
package kexec-tools is not installedInstale
kdumpe outros pacotes necessários por:# yum install kexec-tools
Começando com o Red Hat Enterprise Linux 7.4 (kernel-3.10.0-693.el7), o driver Intel IOMMU é suportado com kdump. Para versões anteriores, Red Hat Enterprise Linux 7.3 (kernel-3.10.0-514[.XYZ].el7) e anteriores, é aconselhável que o suporte Intel IOMMU seja desativado, caso contrário o kdump kernel provavelmente não responderá.
Recursos adicionais
-
Informações sobre os requisitos de memória para
kdumpestão disponíveis em Seção 7.5.1, “Requisitos de memória para kdump”.
7.3. Configuração do kdump na linha de comando
7.3.1. Configuração do uso da memória kdump
A memória para kdump é reservada durante a inicialização do sistema. O tamanho da memória é configurado no arquivo de configuração do Grand Unified Bootloader (GRUB) 2 do sistema. O tamanho da memória depende do valor crashkernel= especificado no arquivo de configuração e do tamanho da memória física do sistema.
A opção crashkernel= pode ser definida de várias maneiras. Você pode especificar o valor crashkernel= ou configurar a opção auto. A opção crashkernel=auto boot, reserva a memória automaticamente, dependendo da quantidade total de memória física do sistema. Quando configurado, o kernel reservará automaticamente uma quantidade apropriada de memória necessária para o kernel kdump. Isto ajuda a evitar a ocorrência de erros fora da memória (OOM).
A alocação automática de memória para kdump varia de acordo com a arquitetura de hardware do sistema e o tamanho da memória disponível.
Por exemplo, no AMD64 e Intel 64, o parâmetro crashkernel=auto só funciona quando a memória disponível é superior a 1GB e a arquitetura ARM de 64 bits e os sistemas IBM Power Systems têm memória disponível superior a 2GB.
Se o sistema tiver menos do que o limite mínimo de memória para alocação automática, você pode configurar manualmente a quantidade de memória reservada.
Pré-requisitos
-
Cumpridos os requisitos
kdump
Procedimento
-
Edite o arquivo
/etc/default/grubusando as permissões de raiz. Defina a opção
crashkernel=para o valor requerido.Por exemplo, para reservar 128 MB de memória, use o seguinte:
crashkernel=128M
Alternativamente, você pode definir a quantidade de memória reservada para uma variável, dependendo da quantidade total de memória instalada. A sintaxe da reserva de memória em uma variável é
crashkernel=<range1>:<size1>,<range2>:<size2>. Por exemplo:crashkernel=512M-2G:64M,2G-:128M
O exemplo acima reserva 64 MB de memória se a quantidade total de memória do sistema for 512 MB ou superior e inferior a 2 GB. Se a quantidade total de memória for superior a 2 GB, 128 MB são reservados para
kdump.Deslocar a memória reservada.
Alguns sistemas exigem reservar memória com um certo deslocamento fixo, uma vez que a reserva de crashkernel é muito cedo, e quer reservar alguma área para uso especial. Se o offset for definido, a memória reservada começa lá. Para compensar a memória reservada, use a seguinte sintaxe:
crashkernel=128M@16M
O exemplo acima significa que
kdumpreserva 128 MB de memória a partir de 16 MB (endereço físico 0x01000000). Se o parâmetro de desvio for ajustado para 0 ou omitido completamente,kdumpcompensa automaticamente a memória reservada. Esta sintaxe também pode ser usada ao definir uma reserva de memória variável como descrito acima; neste caso, o offset é sempre especificado por último (por exemplo,crashkernel=512M-2G:64M,2G-:128M@16M).
Use o seguinte comando para atualizar o arquivo de configuração do GRUB2:
# grub2-mkconfig -o /boot/grub2/grub.cfg
A forma alternativa de configurar a memória para kdump é anexar o crashkernel=<SOME_VALUE> para a variável kernelopts com o grub2-editenv que atualizará todas as suas entradas de inicialização. Ou você pode usar o utilitário grubby para atualizar os parâmetros de linha de comando do kernel de apenas uma entrada.
Recursos adicionais
-
Para mais informações sobre entradas de inicialização,
kernelopts, e como trabalhar comgrub2-editenvegrubbyveja Configurando os parâmetros de linha de comando do kernel.
7.3.2. Configurando o alvo kdump
Quando uma falha no núcleo é capturada, o núcleo pode ser armazenado como um arquivo em um sistema de arquivo local, escrito diretamente em um dispositivo, ou enviado através de uma rede usando o protocolo NFS (Network File System) ou SSH (Secure Shell). Apenas uma destas opções pode ser definida de cada vez, e o comportamento padrão é armazenar o arquivo vmcore no diretório /var/crash/ do sistema de arquivos local.
Pré-requisitos
-
Cumpridos os requisitos
kdump
Procedimento
Para armazenar o arquivo vmcore no diretório /var/crash/ do sistema de arquivos local:
Edite o arquivo
/etc/kdump.confe especifique o caminho:caminho /var/crash
A opção
path /var/crashrepresenta o caminho para o sistema de arquivo no qualkdumpsalva o arquivovmcore. Quando você especifica um alvo de despejo no arquivo/etc/kdump.conf, então opathé relativo ao alvo de despejo especificado.Se você não especificar um alvo de despejo no arquivo
/etc/kdump.conf, então opathrepresenta o caminho absoluto a partir do diretório raiz. Dependendo do que está montado no sistema atual, o alvo de despejo e o caminho de despejo ajustado são tomados automaticamente.
kdump salva o arquivo vmcore no diretório /var/crash/var/crash, quando o alvo do despejo é montado em /var/crash e a opção path também é definida como /var/crash no arquivo /etc/kdump.conf. Por exemplo, no exemplo a seguir, o sistema de arquivo ext4 já está montado em /var/crash e o path está configurado como /var/crash:
grep -v ^# etc/kdump.conf | grep -v ^$ ext4 /dev/mapper/vg00-varcrashvol path /var/crash core_collector makedumpfile -c --message-level 1 -d 31
Isto resulta no caminho /var/crash/var/crash. Para resolver este problema, use a opção path / ao invés de path /var/crash
Para alterar o diretório local no qual o despejo principal deve ser salvo, como root, edite o arquivo de configuração /etc/kdump.conf como descrito abaixo.
-
Remova o sinal de hash (#) do início da linha
#path /var/crash. Substituir o valor pelo caminho de diretório pretendido. Por exemplo:
caminho /usr/local/cores
ImportanteNo Red Hat Enterprise Linux 8, o diretório definido como alvo do kdump usando a diretiva
pathdeve existir quando o serviço systemdkdumpfor iniciado - caso contrário, o serviço falha. Este comportamento é diferente de versões anteriores do Red Hat Enterprise Linux, onde o diretório estava sendo criado automaticamente se ele não existisse ao iniciar o serviço.
Para escrever o arquivo em uma partição diferente, como root, edite o arquivo de configuração /etc/kdump.conf como descrito abaixo.
Remova o sinal de hash (#) do início da linha
#ext4, dependendo de sua escolha.-
nome do dispositivo (a linha
#ext4 /dev/vg/lv_kdump) -
etiqueta do sistema de arquivo (a linha
#ext4 LABEL=/boot) -
UUID (a linha
#ext4 UUID=03138356-5e61-4ab3-b58e-27507ac41937)
-
nome do dispositivo (a linha
Alterar o tipo de sistema de arquivo, bem como o nome do dispositivo, etiqueta ou UUID para os valores desejados. Por exemplo:
ext4 UUID=03138356-5e61-4ab3-b58e-27507ac41937
ImportanteRecomenda-se especificar os dispositivos de armazenamento usando um
LABEL=ouUUID=. Nomes de dispositivos de disco como/dev/sda3não são garantidos para ser consistentes durante a reinicialização.ImportanteAo despejar para o Dispositivo de Armazenamento de Acesso Direto (DASD) no hardware IBM Z, é essencial que os dispositivos de despejo sejam especificados corretamente em
/etc/dasd.confantes de prosseguir.
Para escrever o depósito de lixo diretamente em um dispositivo:
-
Remova o sinal de hash (#) do início da linha
#raw /dev/vg/lv_kdump. Substituir o valor pelo nome do dispositivo pretendido. Por exemplo:
bruto /dev/sdb1
Para armazenar a lixeira em uma máquina remota usando o protocolo NFS:
-
Remova o sinal de hash (#) do início da linha
#nfs my.server.com:/export/tmp. Substituir o valor por um hostname válido e um caminho de diretório. Por exemplo:
nfs penguin.example.com:/export/cores
Para armazenar a lixeira em uma máquina remota usando o protocolo SSH:
-
Remova o sinal de hash (#) desde o início do
#ssh user@my.server.comlinha. - Substituir o valor por um nome de usuário e um nome de host válidos.
Inclua sua chave
SSHna configuração.-
Remova o sinal de hash do início da linha
#sshkey /root/.ssh/kdump_id_rsa. Mude o valor para a localização de uma chave válida no servidor para o qual você está tentando despejar. Por exemplo:
ssh john@penguin.example.com sshkey /root/.ssh/mykey
-
Remova o sinal de hash do início da linha
Recursos adicionais
- Para uma lista completa dos alvos atualmente suportados e não suportados, ordenados por tipo, ver Seção 7.5.3, “Alvos kdump apoiados”.
- Para obter informações sobre como configurar um servidor SSH e configurar uma autenticação baseada em chaves, consulte Configuring basic system settings no Red Hat Enterprise Linux.
7.3.3. Configurando o coletor central
O serviço kdump usa um programa core_collector para capturar a imagem vmcore. Na RHEL, o utilitário makedumpfile é o coletor central padrão.
makedumpfile é um programa de despejo que ajuda a comprimir o tamanho de um arquivo de despejo e copiar somente as páginas necessárias usando vários níveis de despejo.
makedumpfile faz um pequeno arquivo de despejo, seja comprimindo os dados do despejo ou excluindo páginas desnecessárias ou ambas. Ele precisa das primeiras informações de depuração do kernel para entender como o primeiro kernel usa a memória. Isto ajuda a detectar as páginas necessárias.
Sintaxe
core_collector makedumpfile -l --message- nível 1 -d 31
Opções
-
-c,-lou-p: especifique o formato de arquivo comprimido dump por cada página usando a opçãozlibpara-c,lzopara-lousnappypara-p. -
-d(dump_level): exclui as páginas para que não sejam copiadas para o arquivo dump. -
--message-level: especifique os tipos de mensagem. Você pode restringir as saídas impressas especificandomessage_levelcom esta opção. Por exemplo, especificando 7 comomessage_levelimprime mensagens comuns e mensagens de erro. O valor máximo demessage_levelé 31
Pré-requisitos
-
Cumpridos os requisitos
kdump
Procedimento
-
Como
root, edite o arquivo de configuração/etc/kdump.confe remova o sinal de hash (#) do início do#core_collector makedumpfile -l --message-level 1 -d 31. - Para permitir a compressão de arquivos de despejo, execute:
core_collector makedumpfile -l --message- nível 1 -d 31
onde,
-
-lespecifica o formato de arquivo comprimidodump. -
-despecifica o nível de despejo como 31. -
--message-levelespecifica o nível de mensagem como 1.
Além disso, considere os seguintes exemplos utilizando as opções -c e -p:
-
Para comprimir o arquivo de despejo usando
-c:
core_collector makedumpfile -c -d 31 --message-level 1
-
Para comprimir o arquivo de despejo usando
-p:
core_collector makedumpfile -p -d 31 --message-level 1
Recursos adicionais
-
Consulte a página de manual
makedumpfile(8)para uma lista completa das opções disponíveis.
7.3.4. Configuração das respostas de falha padrão do kdump
Por padrão, quando kdump falha em criar um arquivo vmcore no local de destino especificado em Seção 7.3.2, “Configurando o alvo kdump”, o sistema é reinicializado, e o dump é perdido no processo. Para mudar este comportamento, siga o procedimento abaixo.
Pré-requisitos
-
Cumpridos os requisitos
kdump
Procedimento
-
Como
root, remova o sinal de hash (#) do início da linha#failure_actionno arquivo de configuração/etc/kdump.conf. Substituir o valor por uma ação desejada, conforme descrito em Seção 7.5.5, “Respostas a falhas padrão suportadas”. Por exemplo:
failure_action poweroff
7.3.5. Habilitação e desativação do serviço kdump
Para iniciar o serviço kdump no momento da inicialização, siga o procedimento abaixo.
Pré-requisitos
-
Cumpridos os requisitos do
kdump. - Toda a configuração é configurada de acordo com suas necessidades.
Procedimento
Para habilitar o serviço
kdump, use o seguinte comando:# systemctl enable kdump.serviceIsto permite o serviço para
multi-user.target.Para iniciar o serviço na sessão atual, use o seguinte comando:
# systemctl start kdump.servicePara interromper o serviço
kdump, digite o seguinte comando:# systemctl stop kdump.servicePara desativar o serviço
kdump, execute o seguinte comando:# systemctl disable kdump.service
É recomendável definir kptr_restrict=1 como padrão. Quando kptr_restrict é configurado para (1) como padrão, o serviço kdumpctl carrega o kernel de falha mesmo que o Kernel Address Space Layout (KASLR) esteja ativado ou não ativado.
Etapa de solução de problemas
Quando kptr_restrict não está configurado para (1), e se KASLR estiver ativado, o conteúdo do arquivo /proc/kore é gerado como todos os zeros. Conseqüentemente, o serviço kdumpctl não consegue acessar o /proc/kcore e carregar o kernel do crash.
Para contornar este problema, o arquivo kexec-kdump-howto.txt exibe uma mensagem de aviso, que especifica para manter a configuração recomendada como kptr_restrict=1.
Para garantir que o serviço kdumpctl carregue o núcleo do acidente, verifique isso:
-
Kernel
kptr_restrict=1no arquivosysctl.conf.
Recursos adicionais
-
Para mais informações sobre
systemde a configuração de serviços em geral, veja Configuring basic system settings no Red Hat Enterprise Linux.
7.4. Configuração do kdump no console web
Configurar e testar a configuração kdump no console web RHEL 8.
O console web é parte de uma instalação default do Red Hat Enterprise Linux 8 e habilita ou desabilita o serviço kdump no momento da inicialização. Além disso, o console web permite configurar convenientemente a memória reservada para kdump; ou selecionar o local de salvamento vmcore em um formato não comprimido ou comprimido.
Pré-requisitos
- Ver Red Hat Enterprise Linux web console para mais detalhes.
7.4.1. Configuração do uso da memória kdump e localização do alvo no console web
O procedimento abaixo mostra como usar a aba Kernel Dump na interface do console web do Red Hat Enterprise Linux para configurar a quantidade de memória que é reservada para o kdump kernel. O procedimento também descreve como especificar a localização alvo do arquivo vmcore dump e como testar sua configuração.
Pré-requisitos
- Introdução à operação do web console
Procedimento
-
Abra a aba
Kernel Dumpe inicie o serviçokdump. -
Configure o uso da memória
kdumpatravés do command line. Clique no link ao lado da opção
Crash dump location.
Selecione a opção
Local Filesystemno menu suspenso e especifique o diretório no qual você deseja salvar o despejo.
Alternativamente, selecione a opção
Remote over SSHno menu suspenso para enviar o vmcore para uma máquina remota usando o protocolo SSH.Preencha os campos
Server,ssh key, eDirectorycom o endereço da máquina remota, localização da chave ssh e um diretório de destino.Outra opção é selecionar a opção
Remote over NFSno menu suspenso e preencher o campoMountpara enviar o vmcore para uma máquina remota usando o protocolo NFS.NotaMarque a caixa de seleção
Compressionpara reduzir o tamanho do arquivo vmcore.
Teste sua configuração quebrando o kernel.
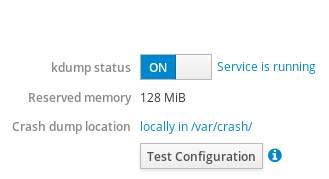 Atenção
AtençãoEsta etapa interrompe a execução do núcleo e resulta em um colapso do sistema e perda de dados.
Recursos adicionais
-
Para uma lista completa das metas atualmente suportadas para
kdump, veja Supported kdump targets. - Para obter informações sobre como configurar um servidor SSH e configurar uma autenticação baseada em chaves, consulte Using secure communications between two systems with OpenSSH.
7.5. Configurações e metas kdump suportadas
7.5.1. Requisitos de memória para kdump
Para que kdump possa capturar um kernel crash dump e salvá-lo para análise posterior, uma parte da memória do sistema tem que ser permanentemente reservada para o kernel de captura. Quando reservada, esta parte da memória do sistema não está disponível para o kernel principal.
Os requisitos de memória variam com base em certos parâmetros do sistema. Um dos principais fatores é a arquitetura de hardware do sistema. Para descobrir a arquitetura exata da máquina (como Intel 64 e AMD64, também conhecida como x86_64) e imprimi-la na saída padrão, use o seguinte comando:
$ uname -m
A tabela abaixo contém uma lista de requisitos mínimos de memória para reservar automaticamente um tamanho de memória para kdump. O tamanho muda de acordo com a arquitetura do sistema e a memória física total disponível.
Tabela 7.1. Quantidade mínima de memória reservada necessária para a kdump
| Arquitetura | Memória disponível | Memória mínima reservada |
|---|---|---|
|
AMD64 e Intel 64 ( | 1 GB a 4 GB | 160 MB de RAM. |
| 4 GB a 64 GB | 192 MB de RAM. | |
| 64 GB a 1 TB | 256 MB de RAM. | |
| 1 TB e mais | 512 MB de RAM. | |
|
Arquitetura ARM de 64 bits ( | 2 GB e mais | 448 MB de RAM. |
|
IBM Power Systems ( | 2 GB a 4 GB | 384 MB de RAM. |
| 4 GB a 16 GB | 512 MB de RAM. | |
| 16 GB a 64 GB | 1 GB de RAM. | |
| 64 GB a 128 GB | 2 GB de RAM. | |
| 128 GB e mais | 4 GB de RAM. | |
|
IBM Z ( | 1 GB a 4 GB | 160 MB de RAM. |
| 4 GB a 64 GB | 192 MB de RAM. | |
| 64 GB a 1 TB | 256 MB de RAM. | |
| 1 TB e mais | 512 MB de RAM. |
Em muitos sistemas, kdump é capaz de estimar a quantidade de memória necessária e reservá-la automaticamente. Este comportamento é ativado por padrão, mas só funciona em sistemas que possuem mais do que uma certa quantidade de memória total disponível, que varia de acordo com a arquitetura do sistema.
A configuração automática da memória reservada com base na quantidade total de memória no sistema é uma estimativa de melhor esforço. A memória realmente necessária pode variar devido a outros fatores, tais como dispositivos de E/S. O uso insuficiente de memória pode fazer com que um kernel debug não seja capaz de iniciar como um kernel de captura em caso de pânico do kernel. Para evitar este problema, aumente suficientemente a memória do kernel em caso de pânico.
Recursos adicionais
- Para informações sobre como alterar as configurações da memória na linha de comando, veja Seção 7.3.1, “Configuração do uso da memória kdump”.
- Para instruções sobre como configurar a quantidade de memória reservada através do console web, veja Seção 7.4.1, “Configuração do uso da memória kdump e localização do alvo no console web”.
- Para mais informações sobre as diversas capacidades e limites da tecnologia Red Hat Enterprise Linux, veja o technology capabilities and limits tables.
7.5.2. Limiar mínimo para reserva automática de memória
Em alguns sistemas, é possível alocar a memória para kdump automaticamente, seja usando o parâmetro crashkernel=auto no arquivo de configuração do carregador de inicialização, ou habilitando esta opção no utilitário de configuração gráfica. Para que esta reserva automática funcione, entretanto, é necessário que uma certa quantidade de memória total esteja disponível no sistema. A quantidade difere de acordo com a arquitetura do sistema.
A tabela abaixo lista os limites para alocação automática de memória. Se o sistema tiver menos memória do que a especificada na tabela, a memória precisa ser reservada manualmente.
Tabela 7.2. Quantidade mínima de memória necessária para a reserva automática de memória
| Arquitetura | Memória Requerida |
|---|---|
|
AMD64 e Intel 64 ( | 2 GB |
|
IBM Power Systems ( | 2 GB |
|
IBM Z ( | 4 GB |
Recursos adicionais
- Para obter informações sobre como alterar manualmente essas configurações na linha de comando, consulte Seção 7.3.1, “Configuração do uso da memória kdump”.
- Para instruções sobre como alterar manualmente a quantidade de memória reservada através do console web, veja Seção 7.4.1, “Configuração do uso da memória kdump e localização do alvo no console web”.
7.5.3. Alvos kdump apoiados
Quando uma falha no kernel é capturada, o arquivo vmcore dump pode ser escrito diretamente em um dispositivo, armazenado como um arquivo em um sistema de arquivo local, ou enviado através de uma rede. A tabela abaixo contém uma lista completa de alvos de despejo que são atualmente suportados ou explicitamente não suportados por kdump.
Tabela 7.3. Alvos kdump apoiados
| Tipo | Alvos suportados | Alvos não suportados |
|---|---|---|
| Dispositivo bruto | Todos os discos e divisórias em bruto fixados localmente. | |
| Sistema de arquivo local |
|
Qualquer sistema de arquivo local não explicitamente listado como suportado nesta tabela, incluindo o tipo |
| Diretório remoto |
Diretórios remotos acessados usando o protocolo |
Diretórios remotos no sistema de arquivos |
|
Diretórios remotos acessados usando o protocolo |
Diretórios remotos acessados usando o protocolo | Armazéns com vários caminhos. |
|
Diretórios remotos acessados através de | ||
|
Diretórios remotos acessados usando o protocolo | ||
|
Diretórios remotos acessados usando o protocolo | ||
| Diretórios remotos acessados usando interfaces de rede sem fio. | ||
A utilização de dump assistido por firmware (fadump) para capturar um vmcore e armazená-lo em uma máquina remota usando SSH ou protocolo NFS causa a renomeação da interface de rede para kdump-<interface-name>. A renomeação acontece se o <interface-name> for genérico, por exemplo *eth#, net#, e assim por diante. Este problema ocorre porque os scripts de captura do vmcore no disco RAM inicial (initrd) adicionam o prefixo kdump- ao nome da interface de rede para garantir a atribuição de nomes persistentes. Como o mesmo initrd é usado também para uma inicialização regular, o nome da interface é alterado também para o kernel de produção.
Recursos adicionais
- Para informações sobre como configurar o tipo de alvo na linha de comando, ver Seção 7.3.2, “Configurando o alvo kdump”.
- Para informações sobre como configurar o alvo através do console web, veja Seção 7.4.1, “Configuração do uso da memória kdump e localização do alvo no console web”.
7.5.4. Níveis de filtragem kdump suportados
Para reduzir o tamanho do arquivo de despejo, kdump usa o coletor central makedumpfile para comprimir os dados e opcionalmente para omitir informações indesejadas. A tabela abaixo contém uma lista completa dos níveis de filtragem que são atualmente suportados pelo utilitário makedumpfile.
Tabela 7.4. Níveis de Filtragem Suportados
| Opção | Descrição |
|---|---|
|
| Zero páginas |
|
| Páginas de cache |
|
| Cache privado |
|
| Páginas do usuário |
|
| Páginas livres |
O comando makedumpfile suporta a remoção de páginas enormes transparentes e páginas hugetlbfs. Considere estes dois tipos de páginas de hugetlbfs e remova-as usando o nível -8.
Recursos adicionais
- Para instruções sobre como configurar o coletor central na linha de comando, veja Seção 7.3.3, “Configurando o coletor central”.
7.5.5. Respostas a falhas padrão suportadas
Por padrão, quando kdump falha em criar uma lixeira de núcleo, o sistema operacional é reinicializado. Você pode, no entanto, configurar kdump para realizar uma operação diferente caso não consiga salvar o despejo do núcleo para o alvo principal. A tabela abaixo lista todas as ações padrão que são atualmente suportadas.
Tabela 7.5. Ações padrão suportadas
| Opção | Descrição |
|---|---|
|
| Tentativa de salvar o despejo do núcleo para o sistema de arquivo raiz. Esta opção é especialmente útil em combinação com um alvo de rede: se o alvo de rede for inalcançável, esta opção configura o kdump para salvar o core dump localmente. O sistema é reinicializado em seguida. |
|
| Reiniciar o sistema, perdendo o núcleo de despejo no processo. |
|
| Pare o sistema, perdendo o despejo do núcleo no processo. |
|
| Desligue o sistema, perdendo o despejo do núcleo no processo. |
|
| Executar uma sessão shell de dentro do initramfs, permitindo que o usuário registre o despejo do núcleo manualmente. |
Recursos adicionais
- Para informações detalhadas sobre como configurar as respostas de falha padrão na linha de comando, ver Seção 7.3.4, “Configuração das respostas de falha padrão do kdump”.
7.5.6. Estimativa do tamanho do kdump
Ao planejar e construir seu ambiente kdump, é necessário saber quanto espaço é necessário para o arquivo dump antes de ser produzido.
O comando makedumpfile --mem-usage fornece um relatório útil sobre páginas excluíveis, e pode ser usado para determinar qual nível de despejo você quer atribuir. Execute este comando quando o sistema estiver sob carga representativa, caso contrário makedumpfile --mem-usage retorna um valor menor do que o esperado em seu ambiente de produção.
[root@hostname ~]# makedumpfile --mem-usage /proc/kcore
TYPE PAGES EXCLUDABLE DESCRIPTION
----------------------------------------------------------------------
ZERO 501635 yes Pages filled with zero
CACHE 51657 yes Cache pages
CACHE_PRIVATE 5442 yes Cache pages + private
USER 16301 yes User process pages
FREE 77738211 yes Free pages
KERN_DATA 1333192 no Dumpable kernel data
O comando makedumpfile --mem-usage informa em pages. Isto significa que você tem que calcular o tamanho da memória em uso em relação ao tamanho da página do kernel. Por default o kernel do Red Hat Enterprise Linux usa 4 páginas de tamanho KB para arquiteturas AMD64 e Intel 64, e 64 páginas de tamanho KB para arquiteturas IBM POWER.
7.6. Teste da configuração do kdump
O procedimento a seguir descreve como testar se o processo de despejo do grão funciona e é válido antes que a máquina entre em produção.
Os comandos abaixo provocam o colapso do kernel. Tenha cuidado ao seguir estes passos e nunca os use descuidadamente no sistema de produção ativo.
Procedimento
-
Reinicie o sistema com
kdumphabilitado. Certifique-se de que
kdumpesteja funcionando:~]# systemctl is-active kdump activeForçar o kernel do Linux a cair:
echo 1 > /proc/sys/kernel/sysrqecho c > /proc/sysrq-triggerAtençãoO comando acima quebra o núcleo e uma reinicialização é necessária.
Uma vez iniciados novamente, os
address-YYYY-MM-DD-HH:MM:SS/vmcoreé criado no local que você especificou em/etc/kdump.conf(por padrão para/var/crash/).NotaAlém de confirmar a validade da configuração, é possível usar esta ação para registrar quanto tempo leva para que um despejo de queda seja concluído, enquanto uma carga representativa estava em funcionamento.
7.7. Usando o kexec para reiniciar o kernel
A chamada de sistema kexec permite carregar e inicializar em outro kernel a partir do kernel atualmente em execução, executando assim uma função de um carregador de inicialização de dentro do kernel.
O utilitário kexec carrega o kernel e a imagem initramfs para a chamada do sistema kexec para inicializar em outro kernel.
O procedimento a seguir descreve como invocar manualmente a chamada do sistema kexec ao usar o utilitário kexec para reinicializar em outro kernel.
Procedimento
Execute o utilitário
kexec:# kexec -l /boot/vmlinuz-3.10.0-1040.el7.x86_64 --initrd=/boot/initramfs-3.10.0-1040.el7.x86_64.img --reuse-cmdlineO comando carrega manualmente o kernel e a imagem initramfs para a chamada ao sistema
kexec.Reinicie o sistema:
# rebootO comando detecta o kernel, desliga todos os serviços e então chama o sistema
kexecpara reiniciar no kernel que você forneceu na etapa anterior.
Quando você usa o comando kexec -e para reiniciar o kernel, o sistema não passa pela seqüência padrão de desligamento antes de iniciar o próximo kernel, o que pode causar perda de dados ou um sistema não responsivo.
7.8. Lista negra de drivers de kernel para kdump
A lista negra de drivers de kernel para kdump é um mecanismo para evitar que os drivers de kernel pretendidos sejam carregados. Colocar em lista negra os drivers do kernel previne o oom killer ou outras falhas no kernel.
Para colocar os drivers do kernel na lista negra, você pode atualizar a variável KDUMP_COMMANDLINE_APPEND= no arquivo /etc/sysconfig/kdump e especificar uma das seguintes opções de lista negra:
-
rd.driver.blacklist=<modules> -
modprobe.blacklist=<modules>
Quando você coloca os drivers da lista negra no arquivo /etc/sysconfig/kdump, impede que o kdump initramfs carregue os módulos da lista negra.
O procedimento a seguir descreve como colocar um driver de kernel na lista negra para evitar falhas no kernel de falha.
Procedimento
Selecione o módulo do núcleo que você pretende colocar na lista negra:
$ lsmod Module Size Used by fuse 126976 3 xt_CHECKSUM 16384 1 ipt_MASQUERADE 16384 1 uinput 20480 1 xt_conntrack 16384 1O comando
lsmodexibe uma lista de módulos que são carregados para o kernel em execução no momento.Atualize a linha
KDUMP_COMMANDLINE_APPEND=no arquivo/etc/sysconfig/kdumpda seguinte forma:KDUMP_COMMANDLINE_APPEND="rd.driver.blacklist=hv_vmbus,hv_storvsc,hv_utils,hv_netvsc,hid-hyperv"
Você também pode atualizar a linha
KDUMP_COMMANDLINE_APPEND=no arquivo/etc/sysconfig/kdumpda seguinte forma:KDUMP_COMMANDLINE_APPEND="modprobe.blacklist=emcp modprobe.blacklist=bnx2fc modprobe.blacklist=libfcoe modprobe.blacklist=fcoe"
Reinicie o serviço
kdump:$ systemctl restart kdump
Recursos adicionais
-
Para maiores informações sobre o
oom killer, veja o seguinte Artigo de Conhecimento. -
A página de manual
dracut.cmdlinepara opções de lista negra de módulos.
7.9. Executando kdump em sistemas com disco criptografado
Ao executar uma partição criptografada criada pela ferramenta Logical Volume Manager (LVM), os sistemas requerem uma certa quantidade de memória disponível. Se o sistema tiver menos do que a quantidade necessária de memória disponível, o utilitário cryptsetup falha na montagem da partição. Como resultado, a captura do arquivo vmcore em um local de destino kdump local (com LVM e criptografia habilitada), falha no segundo kernel (capturar kernel).
Este procedimento descreve o mecanismo kdump em funcionamento aumentando o valor crashkernel=, usando um alvo remoto kdump, ou usando uma função de derivação chave (KDF).
Procedimento
Execute o mecanismo kdump usando um dos seguintes procedimentos:
Para executar o
kdump, defina uma das seguintes opções:-
Configurar um alvo remoto
kdump. - Definir a lixeira para uma divisória não criptografada.
-
Especifique um valor aumentado em
crashkernel=até o nível exigido.
-
Configurar um alvo remoto
Adicione um slot de chave extra usando uma função de derivação de chave (KDF):
-
cryptsetup luksAddKey --pbkdf pbkdf2 /dev/vda2 -
cryptsetup config --key-slot 1 --priority prefer /dev/vda2 -
cryptsetup luksDump /dev/vda2
-
A utilização do KDF padrão da partição criptografada pode consumir muita memória. Você deve fornecer manualmente a senha no segundo kernel (captura), mesmo que você encontre uma mensagem de erro Out of Memory (OOM).
Adicionar um slot de chave extra pode ter um efeito negativo na segurança, já que múltiplas chaves podem descriptografar um volume criptografado. Isto pode causar um risco potencial para o volume.
7.10. Mecanismos de despejo assistido por firmwares
Firmware assisted dump (fadump) é um mecanismo de captura de dump, fornecido como uma alternativa ao mecanismo kdump nos sistemas IBM POWER. Os mecanismos kexec e kdump são úteis para a captura de lixões centrais nos sistemas AMD64 e Intel 64. Entretanto, alguns hardwares como mini sistemas e computadores mainframe, aproveitam o firmware onboard para isolar regiões da memória e evitar qualquer sobregravação acidental de dados que seja importante para a análise de falhas. Esta seção cobre os mecanismos fadump e como eles se integram com o RHEL. O utilitário fadump é otimizado para estes recursos expandidos de dumping nos sistemas IBM POWER.
7.10.1. Descarte assistido por firmware em hardware IBM PowerPC
O utilitário fadump captura o arquivo vmcore de um sistema totalmente reinicializado com PCI e dispositivos de E/S. Este mecanismo usa firmware para preservar regiões de memória durante uma falha e depois reutiliza os scripts de espaço do usuário kdump para salvar o arquivo vmcore. As regiões de memória consistem de todo o conteúdo da memória do sistema, exceto a memória de inicialização, os registros do sistema e as entradas da tabela de páginas de hardware (PTEs).
O mecanismo fadump oferece maior confiabilidade sobre o tipo tradicional de despejo, reiniciando a partição e usando um novo kernel para despejar os dados da falha do kernel anterior. O fadump requer uma plataforma de hardware baseada no processador IBM POWER6 ou uma versão posterior.
Para mais detalhes sobre o mecanismo fadump, incluindo os métodos específicos de reinicialização de hardware PowerPC, consulte o arquivo /usr/share/doc/kexec-tools/fadump-howto.txt.
A área de memória que não é preservada, conhecida como memória de inicialização, é a quantidade de RAM necessária para iniciar com sucesso o kernel após um evento de falha. Por padrão, o tamanho da memória boot é de 256MB ou 5% do total da RAM do sistema, o que for maior.
Ao contrário do evento kexec-initiated, o mecanismo fadump utiliza o núcleo de produção para recuperar um despejo de queda. Ao arrancar após uma falha, o hardware PowerPC torna o nó de dispositivo /proc/device-tree/rtas/ibm.kernel-dump disponível para o sistema de arquivos proc (procfs). Os scripts fadump-aware kdump, verifique os scripts armazenados vmcore, e então complete o reinício do sistema de forma limpa.
7.10.2. Habilitando o mecanismo de despejo assistido por firmware
A capacidade de despejo de falhas dos sistemas IBM POWER pode ser melhorada ao permitir o mecanismo de despejo assistido por firmware (fadump).
Procedimento
-
Instalar e configurar
kdumpconforme descrito no Capítulo 7, "Instalação e configuração do kdump". Adicione
fadump=onà linhaGRUB_CMDLINE_LINUXno arquivo/etc/default/grub:GRUB_CMDLINE_LINUX="rd.lvm.lv=rhel/swap crashkernel=auto rd.lvm.lv=rhel/root rhgb quiet fadump=on"
(Opcional) Se você quiser especificar a memória de inicialização reservada em vez de usar as configurações padrão, configure
crashkernel=xxMparaGRUB_CMDLINE_LINUXem/etc/default/grub, ondexxé a quantidade de memória necessária em megabytes:GRUB_CMDLINE_LINUX="rd.lvm.lv=rhel/swap crashkernel=xxM rd.lvm.lv=rhel/root rhgb quiet fadump=on"
ImportanteA Red Hat recomenda testar todas as opções de configuração de inicialização antes de executá-las. Se você observar erros de Out of Memory (OOM) ao inicializar a partir do kernel do crash, aumente o valor especificado no argumento
crashkernel=até que o kernel do crash possa inicializar de forma limpa. Algumas tentativas e erros podem ser necessários neste caso.
7.10.3. Mecanismos de despejo assistidos por firmware em hardware IBM Z
Os sistemas IBM Z suportam os seguintes mecanismos de despejo assistidos por firmware:
-
Stand-alone dump (sadump) -
VMDUMP
A infra-estrutura kdump é suportada e utilizada nos sistemas IBM Z. Para configurar kdump da RHEL, veja, Capítulo 7, "Installing and configuring kdump" (Instalando e configurando o kdump).
Entretanto, o uso de um dos métodos de despejo assistido por firmware (fadump) para IBM Z pode proporcionar vários benefícios:
-
O mecanismo
sadumpé iniciado e controlado a partir do console do sistema, e é armazenado em um dispositivo de inicializaçãoIPL. -
O mecanismo
VMDUMPé similar aosadump. Esta ferramenta também é iniciada a partir do console do sistema, mas recupera o despejo resultante do hardware e o copia para o sistema para análise. -
Estes métodos (de forma semelhante a outros mecanismos de despejo baseados em hardware) têm a capacidade de capturar o estado de uma máquina na fase inicial de inicialização, antes do início do serviço
kdump. -
Embora
VMDUMPcontenha um mecanismo para receber o arquivo dump em um sistema Red Hat Enterprise Linux, a configuração e controle deVMDUMPé gerenciada a partir do console de Hardware IBM Z.
A IBM discute sadump em detalhes no artigo Stand-alone dump program e VMDUMP no artigo Creating dumps on z/VM com VMDUMP.
A IBM também tem um conjunto de documentação para usar as ferramentas de despejo no Red Hat Enterprise Linux 7 no artigo Using the Dump Tools on Red Hat Enterprise Linux 7.4.
7.10.4. Usando sadump nos sistemas Fujitsu PRIMEQUEST
O mecanismo da Fujitsu sadump foi projetado para fornecer uma captura de lixo fallback em um evento quando kdump não puder ser concluído com sucesso. O mecanismo sadump é invocado manualmente a partir da interface do Conselho de Administração do sistema (MMB). Usando o MMB, configure kdump como para um servidor Intel 64 ou AMD 64 e então execute os seguintes passos adicionais para habilitar sadump.
Procedimento
Adicione ou edite as seguintes linhas no arquivo
/etc/sysctl.confpara garantir quekdumpcomece como esperado parasadump:kernel.panic=0 kernel.unknown_nmi_panic=1
AtençãoEm particular, garantir que após
kdump, o sistema não seja reinicializado. Se o sistema for reinicializado apóskdumpnão conseguir salvar o arquivovmcore, então não é possível invocar osadump.Definir o parâmetro
failure_actionem/etc/kdump.confapropriadamente comohaltoushell.shell de ação_de_sucesso
Recursos adicionais
Para detalhes sobre como configurar seu hardware para sadump, consulte o Manual de Instalação do Servidor FUJITSU PRIMEQUEST 2000 Series.
7.11. Análise de uma lixeira de núcleo
Para determinar a causa da falha do sistema, você pode usar o crash que fornece um prompt interativo muito semelhante ao GNU Debugger (GDB). Este utilitário permite que você analise interativamente um dump core criado por kdump, netdump, diskdump ou xendump, bem como um sistema Linux em execução. Alternativamente, você tem a opção de usar o Kdump Helper ou Kernel Oops Analyzer.
7.11.1. Instalando o utilitário crash
O seguinte procedimento descreve como instalar o crash ferramenta de análise.
Procedimento
Habilitar os repositórios relevantes:
# subscription-manager repos --enable baseos repository# subscription-manager repos --enable appstream repository# subscription-manager repos --enable rhel-8-for-x86_64-baseos-debug-rpmsInstale o pacote
crash:# yum install crashInstale o pacote
kernel-debuginfo:# yum install kernel-debuginfoO pacote corresponde ao seu kernel em execução e fornece os dados necessários para a análise do despejo.
Recursos adicionais
-
Para mais informações sobre como trabalhar com repositórios usando o utilitário
subscription-manager, veja Configuring basic system settings.
7.11.2. Executando e saindo do serviço de emergência
O procedimento a seguir descreve como iniciar o utilitário de ativação do sistema para analisar a causa da falha do sistema.
Pré-requisitos
-
Identificar o kernel atualmente em funcionamento (por exemplo,
4.18.0-5.el8.x86_64).
Procedimento
Para iniciar a utilidade
crash, dois parâmetros necessários precisam ser passados para o comando:-
O debug-info (uma imagem vmlinuz descomprimida), por exemplo
/usr/lib/debug/lib/modules/4.18.0-5.el8.x86_64/vmlinuxfornecido através de um pacote específicokernel-debuginfo. O arquivo vmcore real, por exemplo
/var/crash/127.0.0.1-2018-10-06-14:05:33/vmcoreO comando
crashresultante é então parecido com este:# crash /usr/lib/debug/lib/modules/4.18.0-5.el8.x86_64/vmlinux /var/crash/127.0.0.1-2018-10-06-14:05:33/vmcoreUse a mesma versão <kernel> que foi capturada por
kdump.Exemplo 7.1. Executando o utilitário crash
O exemplo a seguir mostra a análise de um despejo de núcleo criado em 6 de outubro de 2018 às 14h05, utilizando o núcleo 4.18.0-5.el8.x86_64.
... WARNING: kernel relocated [202MB]: patching 90160 gdb minimal_symbol values KERNEL: /usr/lib/debug/lib/modules/4.18.0-5.el8.x86_64/vmlinux DUMPFILE: /var/crash/127.0.0.1-2018-10-06-14:05:33/vmcore [PARTIAL DUMP] CPUS: 2 DATE: Sat Oct 6 14:05:16 2018 UPTIME: 01:03:57 LOAD AVERAGE: 0.00, 0.00, 0.00 TASKS: 586 NODENAME: localhost.localdomain RELEASE: 4.18.0-5.el8.x86_64 VERSION: #1 SMP Wed Aug 29 11:51:55 UTC 2018 MACHINE: x86_64 (2904 Mhz) MEMORY: 2.9 GB PANIC: "sysrq: SysRq : Trigger a crash" PID: 10635 COMMAND: "bash" TASK: ffff8d6c84271800 [THREAD_INFO: ffff8d6c84271800] CPU: 1 STATE: TASK_RUNNING (SYSRQ) crash>
-
O debug-info (uma imagem vmlinuz descomprimida), por exemplo
Para sair do prompt interativo e terminar
crash, digiteexitouq.Exemplo 7.2. Sair do serviço de emergência
crash> exit ~]#
O comando crash também pode ser usado como uma ferramenta poderosa para depuração de um sistema ao vivo. No entanto, use-o com cautela para não quebrar seu sistema.
7.11.3. Exibição de vários indicadores no utilitário de crash
Os procedimentos a seguir descrevem como usar o utilitário de falha e exibir vários indicadores, tais como um buffer de mensagens do kernel, um backtrace, um status do processo, informações de memória virtual e arquivos abertos.
- Exibição do buffer de mensagens
-
Para exibir o buffer de mensagens do kernel, digite o comando
logno prompt interativo, como exibido no exemplo abaixo:
crash> log ... several lines omitted ... EIP: 0060:[<c068124f>] EFLAGS: 00010096 CPU: 2 EIP is at sysrq_handle_crash+0xf/0x20 EAX: 00000063 EBX: 00000063 ECX: c09e1c8c EDX: 00000000 ESI: c0a09ca0 EDI: 00000286 EBP: 00000000 ESP: ef4dbf24 DS: 007b ES: 007b FS: 00d8 GS: 00e0 SS: 0068 Process bash (pid: 5591, ti=ef4da000 task=f196d560 task.ti=ef4da000) Stack: c068146b c0960891 c0968653 00000003 00000000 00000002 efade5c0 c06814d0 <0> fffffffb c068150f b7776000 f2600c40 c0569ec4 ef4dbf9c 00000002 b7776000 <0> efade5c0 00000002 b7776000 c0569e60 c051de50 ef4dbf9c f196d560 ef4dbfb4 Call Trace: [<c068146b>] ? __handle_sysrq+0xfb/0x160 [<c06814d0>] ? write_sysrq_trigger+0x0/0x50 [<c068150f>] ? write_sysrq_trigger+0x3f/0x50 [<c0569ec4>] ? proc_reg_write+0x64/0xa0 [<c0569e60>] ? proc_reg_write+0x0/0xa0 [<c051de50>] ? vfs_write+0xa0/0x190 [<c051e8d1>] ? sys_write+0x41/0x70 [<c0409adc>] ? syscall_call+0x7/0xb Code: a0 c0 01 0f b6 41 03 19 d2 f7 d2 83 e2 03 83 e0 cf c1 e2 04 09 d0 88 41 03 f3 c3 90 c7 05 c8 1b 9e c0 01 00 00 00 0f ae f8 89 f6 <c6> 05 00 00 00 00 01 c3 89 f6 8d bc 27 00 00 00 00 8d 50 d0 83 EIP: [<c068124f>] sysrq_handle_crash+0xf/0x20 SS:ESP 0068:ef4dbf24 CR2: 0000000000000000
Digite
help logpara obter mais informações sobre o uso do comando.NotaO buffer de mensagens do kernel inclui as informações mais essenciais sobre a falha do sistema e, como tal, é sempre despejado primeiro no arquivo
vmcore-dmesg.txt. Isto é útil quando uma tentativa de obter o arquivovmcorecompleto falhou, por exemplo, devido à falta de espaço na localização do alvo. Por padrão,vmcore-dmesg.txtestá localizado no diretório/var/crash/.-
Para exibir o buffer de mensagens do kernel, digite o comando
- Exibindo um retrocesso
-
Para exibir o rastreamento da pilha de kernel, use o comando
bt.
crash> bt PID: 5591 TASK: f196d560 CPU: 2 COMMAND: "bash" #0 [ef4dbdcc] crash_kexec at c0494922 #1 [ef4dbe20] oops_end at c080e402 #2 [ef4dbe34] no_context at c043089d #3 [ef4dbe58] bad_area at c0430b26 #4 [ef4dbe6c] do_page_fault at c080fb9b #5 [ef4dbee4] error_code (via page_fault) at c080d809 EAX: 00000063 EBX: 00000063 ECX: c09e1c8c EDX: 00000000 EBP: 00000000 DS: 007b ESI: c0a09ca0 ES: 007b EDI: 00000286 GS: 00e0 CS: 0060 EIP: c068124f ERR: ffffffff EFLAGS: 00010096 #6 [ef4dbf18] sysrq_handle_crash at c068124f #7 [ef4dbf24] __handle_sysrq at c0681469 #8 [ef4dbf48] write_sysrq_trigger at c068150a #9 [ef4dbf54] proc_reg_write at c0569ec2 #10 [ef4dbf74] vfs_write at c051de4e #11 [ef4dbf94] sys_write at c051e8cc #12 [ef4dbfb0] system_call at c0409ad5 EAX: ffffffda EBX: 00000001 ECX: b7776000 EDX: 00000002 DS: 007b ESI: 00000002 ES: 007b EDI: b7776000 SS: 007b ESP: bfcb2088 EBP: bfcb20b4 GS: 0033 CS: 0073 EIP: 00edc416 ERR: 00000004 EFLAGS: 00000246Tipo
bt <pid>para exibir o backtrace de um processo ou tipo específicohelp btpara maiores informações sobre o uso debt.-
Para exibir o rastreamento da pilha de kernel, use o comando
- Exibindo o status de um processo
-
Para exibir o status dos processos no sistema, use o comando
ps.
crash>
psPID PPID CPU TASK ST %MEM VSZ RSS COMM > 0 0 0 c09dc560 RU 0.0 0 0 [swapper] > 0 0 1 f7072030 RU 0.0 0 0 [swapper] 0 0 2 f70a3a90 RU 0.0 0 0 [swapper] > 0 0 3 f70ac560 RU 0.0 0 0 [swapper] 1 0 1 f705ba90 IN 0.0 2828 1424 init ... several lines omitted ... 5566 1 1 f2592560 IN 0.0 12876 784 auditd 5567 1 2 ef427560 IN 0.0 12876 784 auditd 5587 5132 0 f196d030 IN 0.0 11064 3184 sshd > 5591 5587 2 f196d560 RU 0.0 5084 1648 bashUse
ps <pid>para exibir o status de um único processo específico. Use help ps para mais informações sobre o uso deps.-
Para exibir o status dos processos no sistema, use o comando
- Exibição de informações de memória virtual
-
Para exibir informações básicas de memória virtual, digite o comando
vmno prompt interativo.
crash> vm PID: 5591 TASK: f196d560 CPU: 2 COMMAND: "bash" MM PGD RSS TOTAL_VM f19b5900 ef9c6000 1648k 5084k VMA START END FLAGS FILE f1bb0310 242000 260000 8000875 /lib/ld-2.12.so f26af0b8 260000 261000 8100871 /lib/ld-2.12.so efbc275c 261000 262000 8100873 /lib/ld-2.12.so efbc2a18 268000 3ed000 8000075 /lib/libc-2.12.so efbc23d8 3ed000 3ee000 8000070 /lib/libc-2.12.so efbc2888 3ee000 3f0000 8100071 /lib/libc-2.12.so efbc2cd4 3f0000 3f1000 8100073 /lib/libc-2.12.so efbc243c 3f1000 3f4000 100073 efbc28ec 3f6000 3f9000 8000075 /lib/libdl-2.12.so efbc2568 3f9000 3fa000 8100071 /lib/libdl-2.12.so efbc2f2c 3fa000 3fb000 8100073 /lib/libdl-2.12.so f26af888 7e6000 7fc000 8000075 /lib/libtinfo.so.5.7 f26aff2c 7fc000 7ff000 8100073 /lib/libtinfo.so.5.7 efbc211c d83000 d8f000 8000075 /lib/libnss_files-2.12.so efbc2504 d8f000 d90000 8100071 /lib/libnss_files-2.12.so efbc2950 d90000 d91000 8100073 /lib/libnss_files-2.12.so f26afe00 edc000 edd000 4040075 f1bb0a18 8047000 8118000 8001875 /bin/bash f1bb01e4 8118000 811d000 8101873 /bin/bash f1bb0c70 811d000 8122000 100073 f26afae0 9fd9000 9ffa000 100073 ... several lines omitted ...
Use
vm <pid>para exibir informações sobre um único processo específico, ou usehelp vmpara obter mais informações sobre o uso devm.-
Para exibir informações básicas de memória virtual, digite o comando
- Exibição de arquivos abertos
-
Para exibir informações sobre arquivos abertos, use o comando
files.
crash>
filesPID: 5591 TASK: f196d560 CPU: 2 COMMAND: "bash" ROOT: / CWD: /root FD FILE DENTRY INODE TYPE PATH 0 f734f640 eedc2c6c eecd6048 CHR /pts/0 1 efade5c0 eee14090 f00431d4 REG /proc/sysrq-trigger 2 f734f640 eedc2c6c eecd6048 CHR /pts/0 10 f734f640 eedc2c6c eecd6048 CHR /pts/0 255 f734f640 eedc2c6c eecd6048 CHR /pts/0Use
files <pid>para exibir arquivos abertos por apenas um processo selecionado, ou usehelp filespara maiores informações sobre o uso defiles.-
Para exibir informações sobre arquivos abertos, use o comando
7.11.4. Usando o Kernel Oops Analyzer
O Kernel Oops Analyzer é uma ferramenta que analisa o despejo do crash dump comparando as mensagens oops com questões conhecidas na base de conhecimento.
Pré-requisitos
- Proteja uma mensagem oops para alimentar o Kernel Oops Analyzer, seguindo as instruções em Red Hat Labs.
Procedimento
- Siga o Kernel Oops Analyzer link para acessar a ferramenta.
Navegue pela mensagem oops apertando o botão .

-
Clique no botão para comparar a mensagem oops baseada em informações do
makedumpfilecom soluções conhecidas.
7.12. Usando o kdump precoce para capturar o tempo de boot crashes
Como administrador do sistema, você pode utilizar o suporte early kdump do serviço kdump para capturar um arquivo vmcore do kernel em colapso durante as primeiras etapas do processo de inicialização. Esta seção descreve o que é early kdump, como configurá-lo, e como verificar o status deste mecanismo.
7.12.1. O que é kdump precoce
As falhas no kernel durante a fase de inicialização ocorrem quando o serviço kdump ainda não foi iniciado, e não podem facilitar a captura e o salvamento do conteúdo da memória do kernel que sofreu falhas. Portanto, as informações vitais para a solução de problemas são perdidas.
Para resolver este problema, a RHEL 8 introduziu o recurso early kdump como parte do serviço kdump.
Recursos adicionais
-
Para mais informações sobre
early kdumpe seu uso, veja o arquivo/usr/share/doc/kexec-tools/early-kdump-howto.txte Qual é o suporte inicial do kdump e como posso configurá-lo? -
Para mais informações sobre o serviço
kdump, consulte o Seção 7.1, “O que é kdump”.
7.12.2. Possibilitando o kdump precoce
Esta seção descreve como habilitar o recurso early kdump para eliminar o risco de perda de informações sobre as quedas prematuras do núcleo do boot.
Pré-requisitos
- Uma assinatura ativa do Red Hat Enterprise Linux
-
Um repositório contendo o pacote
kexec-toolspara a arquitetura da CPU de seu sistema -
Cumpridos os requisitos
kdump
Procedimento
Verifique se o serviço
kdumpestá habilitado e ativo:# systemctl is-enabled kdump.service && systemctl is-active kdump.service enabled activeSe
kdumpnão estiver habilitado e funcionando ver, Seção 7.3.5, “Habilitação e desativação do serviço kdump”.Reconstruir a imagem
initramfsdo núcleo de inicialização com a funcionalidadeearly kdump:dracut -f --add earlykdumpAdicione o parâmetro de linha de comando do kernel
rd.earlykdump:grubby --update-kernel=/boot/vmlinuz-$(uname -r) --args="rd.earlykdump"Reinicializar o sistema para refletir as mudanças
rebootOpcionalmente, verifique se
rd.earlykdumpfoi adicionado com sucesso e seearly kdumpfoi ativado:# cat /proc/cmdline BOOT_IMAGE=(hd0,msdos1)/vmlinuz-4.18.0-187.el8.x86_64 root=/dev/mapper/rhel-root ro crashkernel=auto resume=/dev/mapper/rhel-swap rd.lvm.lv=rhel/root rd.lvm.lv=rhel/swap rhgb quiet rd.earlykdump # journalctl -x | grep early-kdump Mar 20 15:44:41 redhat dracut-cmdline[304]: early-kdump is enabled. Mar 20 15:44:42 redhat dracut-cmdline[304]: kexec: loaded early-kdump kernel
Recursos adicionais
-
Para mais informações sobre como habilitar
early kdump, veja o arquivo/usr/share/doc/kexec-tools/early-kdump-howto.txte Qual é o suporte inicial do kdump e como posso configurá-lo?
Capítulo 8. Aplicação de remendos com kernel live patch
Você pode usar a solução de correção ao vivo do kernel do Red Hat Enterprise Linux para corrigir um kernel em execução sem reinicializar ou reiniciar qualquer processo.
Com esta solução, os administradores do sistema:
- Pode aplicar imediatamente patches de segurança críticos ao núcleo.
- Não é necessário esperar por tarefas de longa duração para completar, para que os usuários façam log off, ou por tempo de inatividade programado.
- Controle mais o tempo de funcionamento do sistema e não sacrifique a segurança ou a estabilidade.
Note que nem todo CVE crítico ou importante será resolvido usando a solução de remendo ao vivo do kernel. Nosso objetivo é reduzir as reinicializações necessárias para os patches relacionados à segurança, e não eliminá-los completamente. Para mais detalhes sobre o escopo da solução de remendos ao vivo, veja o Customer Portal Solutions article.
Existem algumas incompatibilidades entre o kernel live patching e outros subcomponentes do kernel. Leia atentamente o site Seção 8.1, “Limitações do kpatch” antes de usar o kernel live patching.
8.1. Limitações do kpatch
-
O recurso
kpatchnão é um mecanismo de atualização do kernel para fins gerais. Ele é usado para aplicar atualizações simples de segurança e correção de erros quando o reinício do sistema não é imediatamente possível. -
Não utilize as ferramentas
SystemTapoukprobedurante ou após o carregamento de um patch. O patch pode não ter efeito até que tais sondas tenham sido removidas.
8.2. Apoio para remendos de terceiros ao vivo
O utilitário kpatch é o único utilitário de correção ao vivo do kernel suportado pela Red Hat com os módulos RPM fornecidos pelos repositórios da Red Hat. A Red Hat não suportará quaisquer patches ao vivo que não tenham sido fornecidos pela própria Red Hat.
Se você precisar de apoio para um problema que surja com um remendo vivo de terceiros, a Red Hat recomenda que você abra um caso com o fornecedor do remendo vivo no início de qualquer investigação na qual seja necessária uma determinação da causa raiz. Isto permite que o código fonte seja fornecido se o fornecedor permitir, e que sua organização de suporte forneça assistência na determinação da causa raiz antes de aumentar a investigação para o Suporte da Red Hat.
Para qualquer sistema rodando com patches ao vivo de terceiros, a Red Hat se reserva o direito de solicitar a reprodução com o software fornecido e suportado pela Red Hat. Caso isto não seja possível, exigimos que um sistema similar e uma carga de trabalho sejam implantados em seu ambiente de teste sem aplicação de patches ao vivo, para confirmar se o mesmo comportamento é observado.
Para mais informações sobre políticas de suporte de software de terceiros, veja Como os Serviços de Suporte Global da Red Hat lidam com software, drivers e/ou hardware/hipervisores não certificados ou sistemas operacionais convidados de terceiros?
8.3. Acesso aos trechos vivos do kernel
A capacidade de remendo ao vivo do kernel é implementada como um módulo do kernel (kmod) que é entregue como um pacote RPM.
Todos os clientes têm acesso a patches de kernel live, que são entregues pelos canais habituais. Entretanto, os clientes que não subscreverem uma oferta de suporte estendida perderão o acesso a novos patches para o lançamento menor atual, uma vez que o próximo lançamento menor se torne disponível. Por exemplo, os clientes com assinaturas padrão só serão capazes de ativar o kernel RHEL 8.2 até que o kernel RHEL 8.3 seja lançado.
8.4. Componentes do kernel live patching
Os componentes do kernel live patching são os seguintes:
- Módulo de remendo de kernel
- O mecanismo de entrega para os remendos de kernel live.
- Um módulo do núcleo que é construído especificamente para o núcleo que está sendo remendado.
- O módulo de correção contém o código das correções desejadas para o kernel.
-
Os módulos de correção registram-se no subsistema do kernel
livepatche fornecem informações sobre as funções originais a serem substituídas, com as indicações correspondentes para as funções de substituição. Os módulos de correção do kernel são entregues como RPMs. -
A convenção de nomenclatura é
kpatch_<kernel version>_<kpatch version>_<kpatch release>. A parte "kernel version" do nome tem dots e dashes substituído por underscores.
- A utilidade
kpatch - Um utilitário de linha de comando para gerenciar módulos de patch.
- O serviço
kpatch -
Um serviço
systemdexigido pormultiuser.target. Este alvo carrega o módulo de patch do kernel no momento da inicialização.
8.5. Como funciona a remenda ao vivo do kernel
A solução de correção do kernel kpatch usa o subsistema livepatch para redirecionar funções antigas para novas funções. Quando um patch de kernel vivo é aplicado a um sistema, as seguintes coisas acontecem:
-
O módulo de correção do kernel é copiado para o diretório
/var/lib/kpatch/e registrado para reaplicação ao kernel porsystemdna próxima inicialização. -
O módulo kpatch é carregado no kernel em execução e as novas funções são registradas no mecanismo
ftracecom um ponteiro para a localização em memória do novo código. -
Quando o kernel acessa a função remendada, ele é redirecionado pelo mecanismo
ftraceque contorna as funções originais e redireciona o kernel para a versão remendada da função.
Figura 8.1. Como funciona a remenda ao vivo do kernel
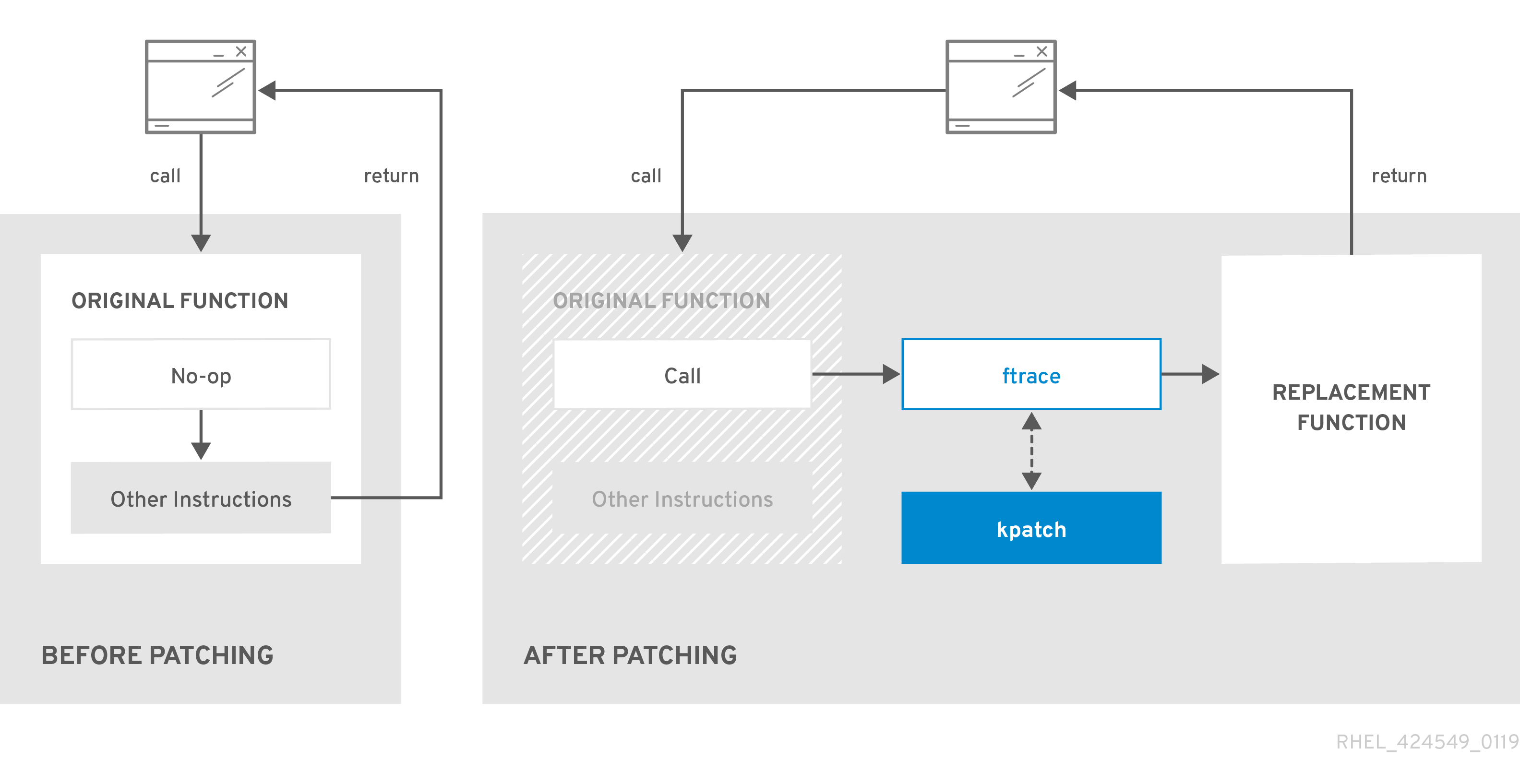
8.6. Permitindo a correção ao vivo do núcleo
Um módulo de correção do kernel é entregue em um pacote RPM, específico para a versão do kernel que está sendo corrigido. Cada pacote de RPM será atualizado cumulativamente ao longo do tempo.
As seções seguintes descrevem como garantir que você receba todas as futuras atualizações cumulativas de remendos ao vivo para um determinado kernel.
A Red Hat não suporta nenhum patche ao vivo de terceiros aplicado a um sistema suportado pela Red Hat.
8.6.1. Assinatura ao vivo do fluxo de remendos
Este procedimento descreve a instalação de um determinado pacote de remendos ao vivo. Ao fazer isso, você se inscreve no fluxo de correções ao vivo para um determinado kernel e assegura que você receba todas as futuras atualizações cumulativas de correções ao vivo para esse kernel.
Como os remendos ao vivo são cumulativos, não é possível selecionar quais remendos individuais são implantados para um determinado grão.
Pré-requisitos
- Permissões de raiz
Procedimento
Opcionalmente, verifique sua versão do kernel:
# uname -r 4.18.0-94.el8.x86_64Procure um pacote de remendos ao vivo que corresponda à versão de seu kernel:
# yum search $(uname -r)Instalar o pacote de remendos ao vivo:
# yum install "kpatch-patch = $(uname -r)"O comando acima instala e aplica os últimos patches cumulativos ao vivo somente para aquele kernel específico.
O pacote de remendos ao vivo contém um módulo de remendos, se a versão do pacote for 1-1 ou superior. Nesse caso, o kernel será automaticamente corrigido durante a instalação do pacote de correção ao vivo.
O módulo de patch do kernel também é instalado no diretório
/var/lib/kpatch/para ser carregado pelo gerente de sistema e serviçossystemddurante as futuras reinicializações.NotaSe ainda não houver nenhum remendo vivo disponível para o kernel dado, um pacote de remendo vivo vazio será instalado. Um pacote de remendos ao vivo vazio terá um pacote kpatch_version-kpatch_release de 0-0, por exemplo
kpatch-patch-4_18_0-94-0-0.el8.x86_64.rpm. A instalação do RPM vazio assina o sistema para todos os futuros live patches para o kernel dado.Opcionalmente, verificar se o miolo está remendado:
# kpatch list Loaded patch modules: kpatch_4_18_0_94_1_1 [enabled] Installed patch modules: kpatch_4_18_0_94_1_1 (4.18.0-94.el8.x86_64) …A saída mostra que o módulo de correção do kernel foi carregado no kernel, que agora está corrigido com as últimas correções do pacote
kpatch-patch-4_18_0-94-1-1.el8.x86_64.rpm.
Recursos adicionais
-
Para mais informações sobre o utilitário de linha de comando
kpatch, consulte a página do manualkpatch(1). - Consultar as seções relevantes do Configuring basic system settings para maiores informações sobre a instalação de pacotes de software no Red Hat Enterprise Linux 8.
8.7. Atualização dos módulos de correção do kernel
Como os módulos de correção do kernel são entregues e aplicados através de pacotes RPM, atualizar um módulo de correção do kernel cumulativo é como atualizar qualquer outro pacote RPM.
Pré-requisitos
- O sistema é subscrito ao vivo, como descrito em Seção 8.6.1, “Assinatura ao vivo do fluxo de remendos”.
Procedimento
Atualização para uma nova versão cumulativa para o kernel atual:
# yum update "kpatch-patch = $(uname -r)"O comando acima instala automaticamente e aplica quaisquer atualizações que estejam disponíveis para o kernel atualmente em execução. Incluindo quaisquer correções ao vivo cumulativas lançadas no futuro.
Alternativamente, atualizar todos os módulos de patch do kernel instalados:
# yum update "kpatch-patch\i1}"
Quando o sistema é reinicializado no mesmo kernel, o kernel é automaticamente remendado ao vivo novamente pelo serviço kpatch.service systemd.
Recursos adicionais
- Para maiores informações sobre atualização de pacotes de software, veja as seções relevantes de Configuring basic system settings no Red Hat Enterprise Linux 8.
8.8. Desabilitando a remenda ao vivo do kernel
Caso os administradores de sistemas encontrem alguns efeitos negativos imprevistos relacionados com a solução de correção ao vivo do núcleo do Red Hat Enterprise Linux, eles têm a opção de desativar o mecanismo. As seções seguintes descrevem as maneiras de desativar a solução de remendos ao vivo.
Atualmente, a Red Hat não suporta a reversão de patches ao vivo sem reiniciar seu sistema. Em caso de qualquer problema, entre em contato com nossa equipe de suporte.
8.8.1. Remoção do pacote de remendos ao vivo
O procedimento a seguir descreve como desativar a solução de correção ao vivo do kernel do Red Hat Enterprise Linux, removendo o pacote de correção ao vivo.
Pré-requisitos
- Permissões de raiz
- O pacote de remendos ao vivo é instalado.
Procedimento
Selecione o pacote de remendos ao vivo:
# yum list installed | grep kpatch-patch kpatch-patch-4_18_0-94.x86_64 1-1.el8 @@commandline …O exemplo de saída acima lista os pacotes de remendos ao vivo que você instalou.
Remover o pacote de remendos vivos:
# yum remove kpatch-patch-4_18_0-94.x86_64Quando um pacote de remendo vivo é removido, o kernel permanece remendado até a próxima reinicialização, mas o módulo de remendo do kernel é removido do disco. Após a próxima reinicialização, o kernel correspondente não será mais remendado.
- Reinicialize seu sistema.
Verificar se o pacote de remendos ao vivo foi removido:
# yum list installed | grep kpatch-patchO comando não exibe nenhuma saída se o pacote tiver sido removido com sucesso.
Opcionalmente, verifique se a solução de remendo ao vivo do kernel está desativada:
# kpatch list Loaded patch modules:O exemplo de saída mostra que o kernel não está remendado e a solução de remendo ao vivo não está ativa porque não há módulos de remendo que estão atualmente carregados.
Recursos adicionais
-
Para mais informações sobre o utilitário de linha de comando
kpatch, consulte a página do manualkpatch(1). - Para mais informações sobre como remover pacotes de software no RHEL 8, consulte as seções relevantes do Configuring basic system settings.
8.8.2. Desinstalando o módulo de patch do kernel
O procedimento a seguir descreve como evitar que a solução de correção ao vivo do kernel do Red Hat Enterprise Linux aplique um módulo de correção do kernel em boots subsequentes.
Pré-requisitos
- Permissões de raiz
- Um pacote de remendos ao vivo é instalado.
- Um módulo de patch de kernel é instalado e carregado.
Procedimento
Selecione um módulo de correção de kernel:
# kpatch list Loaded patch modules: kpatch_4_18_0_94_1_1 [enabled] Installed patch modules: kpatch_4_18_0_94_1_1 (4.18.0-94.el8.x86_64) …Desinstale o módulo de patch do kernel selecionado:
# kpatch uninstall kpatch_4_18_0_94_1_1 uninstalling kpatch_4_18_0_94_1_1 (4.18.0-94.el8.x86_64)Observe que o módulo de patch do kernel desinstalado ainda está carregado:
# kpatch list Loaded patch modules: kpatch_4_18_0_94_1_1 [enabled] Installed patch modules: <NO_RESULT>
Quando o módulo selecionado é desinstalado, o kernel permanece remendado até a próxima reinicialização, mas o módulo de remendo do kernel é removido do disco.
- Reinicialize seu sistema.
Opcionalmente, verifique se o módulo de correção do kernel foi desinstalado:
# kpatch list Loaded patch modules: …O exemplo de saída acima não mostra nenhum módulo de correção de kernel carregado ou instalado, portanto, o kernel não é corrigido e a solução de correção ao vivo do kernel não está ativa.
Recursos adicionais
-
Para mais informações sobre o utilitário de linha de comando
kpatch, consulte a página do manualkpatch(1).
8.8.3. Desabilitando o kpatch.service
O procedimento a seguir descreve como evitar que a solução de correção ao vivo do kernel do Red Hat Enterprise Linux aplique todos os módulos de correção do kernel globalmente em boots subsequentes.
Pré-requisitos
- Permissões de raiz
- Um pacote de remendos ao vivo é instalado.
- Um módulo de patch de kernel é instalado e carregado.
Procedimento
Verifique se
kpatch.serviceestá habilitado:# systemctl is-enabled kpatch.service enabledDesativar
kpatch.service:# systemctl disable kpatch.service Removed /etc/systemd/system/multi-user.target.wants/kpatch.service.Observe que o módulo de patch de kernel aplicado ainda está carregado:
# kpatch list Loaded patch modules: kpatch_4_18_0_94_1_1 [enabled] Installed patch modules: kpatch_4_18_0_94_1_1 (4.18.0-94.el8.x86_64)
- Reinicialize seu sistema.
Opcionalmente, verifique o status de
kpatch.service:# systemctl status kpatch.service ● kpatch.service - "Apply kpatch kernel patches" Loaded: loaded (/usr/lib/systemd/system/kpatch.service; disabled; vendor preset: disabled) Active: inactive (dead)O exemplo de saída atesta que
kpatch.servicefoi desativado e não está funcionando. Por isso, a solução de remendo ao vivo do kernel não está ativa.Verificar se o módulo de remendo do kernel foi descarregado:
# kpatch list Loaded patch modules: <NO_RESULT> Installed patch modules: kpatch_4_18_0_94_1_1 (4.18.0-94.el8.x86_64)
O exemplo de saída acima mostra que um módulo de correção de kernel ainda está instalado, mas o kernel não está corrigido.
Recursos adicionais
-
Para mais informações sobre o utilitário de linha de comando
kpatch, consulte a página do manualkpatch(1). -
Para mais informações sobre o gerenciador de sistemas e serviços
systemd, arquivos de configuração de unidades, suas localizações, assim como uma lista completa desystemdtipos de unidades, veja as seções relevantes em Configuring basic system settings.
Capítulo 9. Estabelecendo limites para aplicações
Como administrador de sistemas, use a funcionalidade do kernel dos grupos de controle para definir limites, priorizar ou isolar os recursos de hardware dos processos de modo que as aplicações em seu sistema sejam estáveis e não fiquem sem memória.
9.1. Entendendo os grupos de controle
Control groups é um recurso do kernel Linux que permite organizar processos em grupos hierarquicamente ordenados - cgroups. A hierarquia (árvore de grupos de controle) é definida fornecendo estrutura para cgroups sistema de arquivo virtual, montado por padrão no diretório /sys/fs/cgroup/. Ela é feita manualmente através da criação e remoção de subdiretórios em /sys/fs/cgroup/. Alternativamente, utilizando o sistema systemd e o gerente de serviços.
Os controladores de recursos (um componente do kernel) modificam então o comportamento dos processos em cgroups limitando, priorizando ou alocando recursos do sistema (tais como tempo de CPU, memória, largura de banda de rede ou várias combinações) desses processos.
O valor agregado de cgroups é a agregação de processos que permite a divisão de recursos de hardware entre aplicações e usuários. Assim, é possível obter um aumento na eficiência geral, estabilidade e segurança do ambiente dos usuários.
- Grupos de controle versão 1
Control groups version 1 (
cgroups-v1) fornece uma hierarquia de controladores por recurso. Isso significa que cada recurso, como CPU, memória, E/S, etc., tem sua própria hierarquia de grupo de controle. É possível combinar diferentes hierarquias de grupos de controle de uma forma que um controlador possa coordenar com outro na administração de seus respectivos recursos. Entretanto, os dois controladores podem pertencer a hierarquias de processo diferentes, o que não permite sua coordenação adequada.Os controladores
cgroups-v1foram desenvolvidos em um grande período de tempo e, como resultado, o comportamento e a nomenclatura de seus arquivos de controle não é uniforme.- Grupos de controle versão 2
Os problemas com a coordenação do controlador, decorrentes da flexibilidade da hierarquia, levaram ao desenvolvimento do site control groups version 2.
Control groups version 2 (
cgroups-v2) fornece uma hierarquia de grupo de controle única contra a qual todos os controladores de recursos são montados.O comportamento do arquivo de controle e a nomeação é consistente entre os diferentes controladores.
AtençãoA RHEL 8 fornece
cgroups-v2como uma previsão tecnológica com um número limitado de controladores de recursos. Para mais informações sobre os controladores de recursos relevantes, consulte o cgroups-v2 release note.
Esta subseção foi baseada em uma apresentação do Devconf.cz 2019.[1]
Recursos adicionais
-
Para mais informações sobre controladores de recursos, consulte a seção Seção 9.2, “O que são controladores de recursos do kernel” e as páginas do manual
cgroups(7). -
Para mais informações sobre as hierarquias
cgroupse as versõescgroups, consulte as páginas do manualcgroups(7). -
Para mais informações sobre
systemdecgroupscooperação, veja a seção Papel do sistemad nos grupos de controle.
9.2. O que são controladores de recursos do kernel
A funcionalidade dos grupos de controle é habilitada pelos controladores de recursos do kernel. A RHEL 8 suporta vários controladores para control groups version 1 (cgroups-v1) e control groups version 2 (cgroups-v2).
Um controlador de recursos, também chamado de subsistema de grupo de controle, é um subsistema de kernel que representa um único recurso, como tempo de CPU, memória, largura de banda de rede ou E/S de disco. O kernel Linux fornece uma gama de controladores de recursos que são montados automaticamente pelo sistema systemd e pelo gerenciador de serviços. Encontre uma lista dos controladores de recursos atualmente montados no arquivo /proc/cgroups.
Os seguintes controladores estão disponíveis para cgroups-v1:
-
blkio- pode estabelecer limites no acesso de entrada/saída de e para os dispositivos de bloco. -
cpu- pode ajustar os parâmetros do Agendador de Programação Completamente Justo (CFS) para as tarefas do grupo de controle. Ele é montado junto com o controladorcpuacctna mesma montagem. -
cpuacct- cria relatórios automáticos sobre os recursos da CPU utilizados por tarefas em um grupo de controle. É montado junto com o controladorcpuna mesma montagem. -
cpuset- pode ser usado para restringir as tarefas do grupo de controle para executar somente em um subconjunto específico de CPUs e para direcionar as tarefas para usar a memória somente em nós de memória especificados. -
devices- pode controlar o acesso a dispositivos para tarefas em um grupo de controle. -
freezer- pode ser usado para suspender ou retomar tarefas em um grupo de controle. -
memory- pode ser usado para estabelecer limites no uso de memória por tarefas em um grupo de controle e gera relatórios automáticos sobre os recursos de memória utilizados por essas tarefas. -
net_cls- tags pacotes de rede com um identificador de classe (classid) que permite ao controlador de tráfego Linux (o comandotc) identificar pacotes que se originam de uma determinada tarefa do grupo de controle. Um subsistema denet_cls, onet_filter(iptables), também pode usar esta tag para realizar ações em tais pacotes. Onet_filtermarca tomadas de rede com um identificador de firewall (fwid) que permite que o firewall Linux (através do comandoiptables) identifique pacotes originados de uma tarefa específica do grupo de controle. -
net_prio- estabelece a prioridade do tráfego na rede. -
pids- pode estabelecer limites para uma série de processos e seus filhos em um grupo de controle. -
perf_event- pode agrupar tarefas para monitoramento pelo utilitário de monitoramento e relatórios de desempenhoperf. -
rdma- pode estabelecer limites para os recursos específicos de Remote Direct Memory Access/InfiniBand em um grupo de controle. -
hugetlb- pode ser usado para limitar o uso de páginas de memória virtual de grande tamanho por tarefas em um grupo de controle.
Os seguintes controladores estão disponíveis para cgroups-v2:
-
io- Um acompanhamento parablkiodecgroups-v1. -
memory- Um acompanhamento paramemorydecgroups-v1. -
pids- O mesmo quepidsemcgroups-v1. -
rdma- O mesmo querdmaemcgroups-v1. -
cpu- Um acompanhamento paracpuecpuacctdecgroups-v1. -
cpuset- Suporta apenas a funcionalidade central (cpus{,.effective},mems{,.effective}) com uma nova funcionalidade de partição. -
perf_event- O suporte é inerente, nenhum arquivo de controle explícito. Você pode especificar umv2 cgroupcomo parâmetro para o comandoperfque irá traçar o perfil de todas as tarefas dentro dessecgroup.
Um controlador de recursos pode ser usado tanto em uma hierarquia cgroups-v1 quanto em uma hierarquia cgroups-v2, não simultaneamente em ambas.
Recursos adicionais
-
Para mais informações sobre controladores de recursos em geral, consulte a página do manual
cgroups(7). -
Para descrições detalhadas dos controladores de recursos específicos, consulte a documentação no diretório
/usr/share/doc/kernel-doc-<kernel_version>/Documentation/cgroups-v1/. -
Para mais informações sobre
cgroups-v2, consulte a página do manualcgroups(7).
9.3. Usando grupos de controle através de um sistema de arquivo virtual
Você pode usar control groups (cgroups) para estabelecer limites, priorizar ou controlar o acesso aos recursos de hardware para grupos de processos. Isto permite que você controle granularmente o uso de recursos de aplicações para utilizá-los de forma mais eficiente. As seções seguintes fornecem uma visão geral das tarefas relacionadas ao gerenciamento do cgroups tanto para a versão 1 como para a versão 2, utilizando um sistema de arquivo virtual.
9.3.1. Definição de limites de CPU para aplicações usando cgroups-v1
Às vezes uma aplicação consome muito tempo de CPU, o que pode ter um impacto negativo na saúde geral de seu ambiente. Use o sistema de arquivo virtual /sys/fs/ para configurar os limites da CPU para uma aplicação usando control groups version 1 (cgroups-v1).
Pré-requisitos
- Uma aplicação cujo consumo de CPU você deseja restringir.
Verifique se os controladores do
cgroups-v1foram montados:# mount -l | grep cgroup tmpfs on /sys/fs/cgroup type tmpfs (ro,nosuid,nodev,noexec,seclabel,mode=755) cgroup on /sys/fs/cgroup/systemd type cgroup (rw,nosuid,nodev,noexec,relatime,seclabel,xattr,release_agent=/usr/lib/systemd/systemd-cgroups-agent,name=systemd) cgroup on /sys/fs/cgroup/cpu,cpuacct type cgroup (rw,nosuid,nodev,noexec,relatime,seclabel,cpu,cpuacct) cgroup on /sys/fs/cgroup/perf_event type cgroup (rw,nosuid,nodev,noexec,relatime,seclabel,perf_event) cgroup on /sys/fs/cgroup/pids type cgroup (rw,nosuid,nodev,noexec,relatime,seclabel,pids) ...
Procedimento
Identificar o ID do processo (PID) da aplicação que você deseja restringir no consumo da CPU:
# top top - 11:34:09 up 11 min, 1 user, load average: 0.51, 0.27, 0.22 Tasks: 267 total, 3 running, 264 sleeping, 0 stopped, 0 zombie %Cpu(s): 49.0 us, 3.3 sy, 0.0 ni, 47.5 id, 0.0 wa, 0.2 hi, 0.0 si, 0.0 st MiB Mem : 1826.8 total, 303.4 free, 1046.8 used, 476.5 buff/cache MiB Swap: 1536.0 total, 1396.0 free, 140.0 used. 616.4 avail Mem PID USER PR NI VIRT RES SHR S %CPU %MEM TIME+ COMMAND 6955 root 20 0 228440 1752 1472 R 99.3 0.1 0:32.71 sha1sum 5760 jdoe 20 0 3603868 205188 64196 S 3.7 11.0 0:17.19 gnome-shell 6448 jdoe 20 0 743648 30640 19488 S 0.7 1.6 0:02.73 gnome-terminal- 1 root 20 0 245300 6568 4116 S 0.3 0.4 0:01.87 systemd 505 root 20 0 0 0 0 I 0.3 0.0 0:00.75 kworker/u4:4-events_unbound ...O exemplo de saída do programa
toprevela quePID 6955(aplicação ilustrativasha1sum) consome muitos recursos de CPU.Criar um subdiretório no diretório do controlador de recursos
cpu:# mkdir /sys/fs/cgroup/cpu/Example/O diretório acima representa um grupo de controle, onde você pode colocar processos específicos e aplicar certos limites de CPU aos processos. Ao mesmo tempo, alguns arquivos de interface
cgroups-v1ecpuarquivos específicos do controlador serão criados no diretório.Opcionalmente, inspecionar o grupo de controle recém-criado:
# ll /sys/fs/cgroup/cpu/Example/ -rw-r—r--. 1 root root 0 Mar 11 11:42 cgroup.clone_children -rw-r—r--. 1 root root 0 Mar 11 11:42 cgroup.procs -r—r—r--. 1 root root 0 Mar 11 11:42 cpuacct.stat -rw-r—r--. 1 root root 0 Mar 11 11:42 cpuacct.usage -r—r—r--. 1 root root 0 Mar 11 11:42 cpuacct.usage_all -r—r—r--. 1 root root 0 Mar 11 11:42 cpuacct.usage_percpu -r—r—r--. 1 root root 0 Mar 11 11:42 cpuacct.usage_percpu_sys -r—r—r--. 1 root root 0 Mar 11 11:42 cpuacct.usage_percpu_user -r—r—r--. 1 root root 0 Mar 11 11:42 cpuacct.usage_sys -r—r—r--. 1 root root 0 Mar 11 11:42 cpuacct.usage_user -rw-r—r--. 1 root root 0 Mar 11 11:42 cpu.cfs_period_us -rw-r—r--. 1 root root 0 Mar 11 11:42 cpu.cfs_quota_us -rw-r—r--. 1 root root 0 Mar 11 11:42 cpu.rt_period_us -rw-r—r--. 1 root root 0 Mar 11 11:42 cpu.rt_runtime_us -rw-r—r--. 1 root root 0 Mar 11 11:42 cpu.shares -r—r—r--. 1 root root 0 Mar 11 11:42 cpu.stat -rw-r—r--. 1 root root 0 Mar 11 11:42 notify_on_release -rw-r—r--. 1 root root 0 Mar 11 11:42 tasksO exemplo de saída mostra arquivos, tais como
cpuacct.usage,cpu.cfs._period_us, que representam configurações e/ou limites específicos, que podem ser definidos para processos no grupo de controleExample. Observe que os respectivos nomes de arquivos são prefixados com o nome do controlador do grupo de controle ao qual pertencem.Por padrão, o grupo de controle recém-criado herda o acesso a todos os recursos da CPU do sistema sem um limite.
Configurar os limites da CPU para o grupo de controle:
# echo "1000000" > /sys/fs/cgroup/cpu/Example/cpu.cfs_period_us # echo "200000" > /sys/fs/cgroup/cpu/Example/cpu.cfs_quota_us
O arquivo
cpu.cfs_period_usrepresenta um período de tempo em microssegundos (µs, aqui representado como "us") para a freqüência com que o acesso de um grupo de controle aos recursos da CPU deve ser realocado. O limite superior é de 1 segundo e o limite inferior é de 1000 microssegundos.O arquivo
cpu.cfs_quota_usrepresenta a quantidade total de tempo em microssegundos para o qual todos os processos em um grupo de controle podem ser executados coletivamente durante um período (como definido porcpu.cfs_period_us). Assim que os processos em um grupo de controle, durante um único período, esgotam todo o tempo especificado pela cota, eles são acelerados para o restante do período e não podem ser executados até o período seguinte. O limite inferior é de 1000 microssegundos.Os comandos do exemplo acima estabelecem os limites de tempo da CPU para que todos os processos coletivamente no grupo de controle
Examplepossam ser executados apenas por 0,2 segundos (definido porcpu.cfs_quota_us) a cada 1 segundo (definido porcpu.cfs_period_us).Opcionalmente, verificar os limites:
# cat /sys/fs/cgroup/cpu/Example/cpu.cfs_period_us /sys/fs/cgroup/cpu/Example/cpu.cfs_quota_us 1000000 200000Adicione o PID do aplicativo ao grupo de controle
Example:# echo "6955" > /sys/fs/cgroup/cpu/Example/cgroup.procs or # echo "6955" > /sys/fs/cgroup/cpu/Example/tasks
O comando anterior assegura que uma aplicação desejada se torne um membro do grupo de controle
Examplee, portanto, não exceda os limites de CPU configurados para o grupo de controleExample. O PID deve representar um processo existente no sistema. OPID 6955aqui foi atribuído ao processosha1sum /dev/zero &, utilizado para ilustrar o caso de uso do controladorcpu.Verificar se a aplicação é executada no grupo de controle especificado:
# cat /proc/6955/cgroup 12:cpuset:/ 11:hugetlb:/ 10:net_cls,net_prio:/ 9:memory:/user.slice/user-1000.slice/user@1000.service 8:devices:/user.slice 7:blkio:/ 6:freezer:/ 5:rdma:/ 4:pids:/user.slice/user-1000.slice/user@1000.service 3:perf_event:/ 2:cpu,cpuacct:/Example 1:name=systemd:/user.slice/user-1000.slice/user@1000.service/gnome-terminal-server.serviceO exemplo acima mostra que o processo da aplicação desejada é executado no grupo de controle
Example, que aplica limites de CPU ao processo da aplicação.Identificar o consumo atual da CPU de sua aplicação acelerada:
# top top - 12:28:42 up 1:06, 1 user, load average: 1.02, 1.02, 1.00 Tasks: 266 total, 6 running, 260 sleeping, 0 stopped, 0 zombie %Cpu(s): 11.0 us, 1.2 sy, 0.0 ni, 87.5 id, 0.0 wa, 0.2 hi, 0.0 si, 0.2 st MiB Mem : 1826.8 total, 287.1 free, 1054.4 used, 485.3 buff/cache MiB Swap: 1536.0 total, 1396.7 free, 139.2 used. 608.3 avail Mem PID USER PR NI VIRT RES SHR S %CPU %MEM TIME+ COMMAND 6955 root 20 0 228440 1752 1472 R 20.6 0.1 47:11.43 sha1sum 5760 jdoe 20 0 3604956 208832 65316 R 2.3 11.2 0:43.50 gnome-shell 6448 jdoe 20 0 743836 31736 19488 S 0.7 1.7 0:08.25 gnome-terminal- 505 root 20 0 0 0 0 I 0.3 0.0 0:03.39 kworker/u4:4-events_unbound 4217 root 20 0 74192 1612 1320 S 0.3 0.1 0:01.19 spice-vdagentd ...Observe que o consumo de CPU do
PID 6955diminuiu de 99% para 20%.
Recursos adicionais
- Para informações sobre o conceito de grupos de controle, ver Seção 9.1, “Entendendo os grupos de controle”.
-
Para mais informações sobre controladores de recursos, consulte a seção Seção 9.2, “O que são controladores de recursos do kernel” e a página do manual
cgroups(7). -
Para mais informações sobre o sistema de arquivos virtuais
/sys/fs/, consulte a página do manualsysfs(5).
9.3.2. Definição de limites de CPU para aplicações usando cgroups-v2
Às vezes uma aplicação utiliza muito tempo de CPU, o que pode ter um impacto negativo na saúde geral de seu ambiente. Use control groups version 2 (cgroups-v2) para configurar limites de CPU para a aplicação, e restringir seu consumo.
Pré-requisitos
- Uma aplicação cujo consumo de CPU você deseja restringir.
- Seção 9.1, “Entendendo os grupos de controle”
Procedimento
Evitar que
cgroups-v1seja montado automaticamente durante a inicialização do sistema:# grubby --update-kernel=/boot/vmlinuz-$(uname -r) --args="cgroup_no_v1=all"O comando adiciona um parâmetro de linha de comando do kernel à entrada de inicialização atual. O parâmetro
cgroup_no_v1=allimpede quecgroups-v1seja montado automaticamente.Alternativamente, use o parâmetro de linha de comando do kernel
systemd.unified_cgroup_hierarchy=1para montarcgroups-v2durante a inicialização do sistema por padrão.NotaA RHEL 8 apoia tanto
cgroups-v1comocgroups-v2. Entretanto,cgroups-v1é habilitado e montado por padrão durante o processo de inicialização.- Reinicie o sistema para que as mudanças entrem em vigor.
Opcionalmente, verifique se a funcionalidade
cgroups-v1foi desativada:# mount -l | grep cgroup tmpfs on /sys/fs/cgroup type tmpfs (ro,nosuid,nodev,noexec,seclabel,mode=755) cgroup on /sys/fs/cgroup/systemd type cgroup (rw,nosuid,nodev,noexec,relatime,seclabel,xattr,release_agent=/usr/lib/systemd/systemd-cgroups-agent,name=systemd)Se
cgroups-v1tiver sido desativado com sucesso, a saída não mostra nenhuma referência "tipo cgroup", exceto aquelas que pertencem asystemd.Monte
cgroups-v2em qualquer parte do sistema de arquivos:# mount -t cgroup2 none <MOUNT_POINT>Opcionalmente, verifique se a funcionalidade
cgroups-v2foi montada:# mount -l | grep cgroup2 none on /cgroups-v2 type cgroup2 (rw,relatime,seclabel)O exemplo de saída mostra que
cgroups-v2foi montado no diretório/cgroups-v2/.Opcionalmente, inspecionar o conteúdo do diretório
/cgroups-v2/:# ll /cgroups-v2/ -r—r—r--. 1 root root 0 Mar 13 11:57 cgroup.controllers -rw-r—r--. 1 root root 0 Mar 13 11:57 cgroup.max.depth -rw-r—r--. 1 root root 0 Mar 13 11:57 cgroup.max.descendants -rw-r—r--. 1 root root 0 Mar 13 11:57 cgroup.procs -r—r—r--. 1 root root 0 Mar 13 11:57 cgroup.stat -rw-r—r--. 1 root root 0 Mar 13 11:58 cgroup.subtree_control -rw-r—r--. 1 root root 0 Mar 13 11:57 cgroup.threads -rw-r—r--. 1 root root 0 Mar 13 11:57 cpu.pressure -r—r—r--. 1 root root 0 Mar 13 11:57 cpuset.cpus.effective -r—r—r--. 1 root root 0 Mar 13 11:57 cpuset.mems.effective -rw-r—r--. 1 root root 0 Mar 13 11:57 io.pressure -rw-r—r--. 1 root root 0 Mar 13 11:57 memory.pressureO diretório
/cgroups-v2/, também chamado de grupo de controle raiz, contém alguns arquivos de interface (começando porcgroup) e alguns arquivos específicos do controlador, comocpuset.cpus.effective.Identificar os IDs de processo (PIDs) das aplicações que você deseja restringir no consumo da CPU:
# top top - 15:39:52 up 3:45, 1 user, load average: 0.79, 0.20, 0.07 Tasks: 265 total, 3 running, 262 sleeping, 0 stopped, 0 zombie %Cpu(s): 74.3 us, 6.1 sy, 0.0 ni, 19.4 id, 0.0 wa, 0.2 hi, 0.0 si, 0.0 st MiB Mem : 1826.8 total, 243.8 free, 1102.1 used, 480.9 buff/cache MiB Swap: 1536.0 total, 1526.2 free, 9.8 used. 565.6 avail Mem PID USER PR NI VIRT RES SHR S %CPU %MEM TIME+ COMMAND 5473 root 20 0 228440 1740 1456 R 99.7 0.1 0:12.11 sha1sum 5439 root 20 0 222616 3420 3052 R 60.5 0.2 0:27.08 cpu_load_generator 2170 jdoe 20 0 3600716 209960 67548 S 0.3 11.2 1:18.50 gnome-shell 3051 root 20 0 274424 3976 3092 R 0.3 0.2 1:01.25 top 1 root 20 0 245448 10256 5448 S 0.0 0.5 0:02.52 systemd ...O exemplo de saída do programa
toprevela quePID 5473e5439(aplicação ilustrativasha1sumecpu_load_generator) consomem muitos recursos, ou seja, CPU. Ambos são exemplos de aplicações utilizadas para demonstrar o gerenciamento da funcionalidadecgroups-v2.Habilitar os controladores relacionados à CPU:
# echo "+cpu" > /cgroups-v2/cgroup.subtree_control # echo "+cpuset" > /cgroups-v2/cgroup.subtree_control
Os comandos anteriores habilitam os controladores
cpuecpusetpara os grupos de sub-controle imediatos do grupo de controle raiz/cgroups-v2/.Crie um subdiretório no diretório
/cgroups-v2/previamente criado:# mkdir /cgroups-v2/Example/O diretório
/cgroups-v2/Example/representa um grupo de sub-controle, onde você pode colocar processos específicos e aplicar vários limites de CPU aos processos. Além disso, a etapa anterior habilitou os controladorescpuecpusetpara este grupo de sub-controle.No momento da criação de
/cgroups-v2/Example/, algunscgroups-v2arquivos de interface ecpuecpusetarquivos específicos do controlador serão criados no diretório.Opcionalmente, inspecionar o grupo de controle recém-criado:
# ll /cgroups-v2/Example/ -r—r—r--. 1 root root 0 Mar 13 14:48 cgroup.controllers -r—r—r--. 1 root root 0 Mar 13 14:48 cgroup.events -rw-r—r--. 1 root root 0 Mar 13 14:48 cgroup.freeze -rw-r—r--. 1 root root 0 Mar 13 14:48 cgroup.max.depth -rw-r—r--. 1 root root 0 Mar 13 14:48 cgroup.max.descendants -rw-r—r--. 1 root root 0 Mar 13 14:48 cgroup.procs -r—r—r--. 1 root root 0 Mar 13 14:48 cgroup.stat -rw-r—r--. 1 root root 0 Mar 13 14:48 cgroup.subtree_control -rw-r—r--. 1 root root 0 Mar 13 14:48 cgroup.threads -rw-r—r--. 1 root root 0 Mar 13 14:48 cgroup.type -rw-r—r--. 1 root root 0 Mar 13 14:48 cpu.max -rw-r—r--. 1 root root 0 Mar 13 14:48 cpu.pressure -rw-r—r--. 1 root root 0 Mar 13 14:48 cpuset.cpus -r—r—r--. 1 root root 0 Mar 13 14:48 cpuset.cpus.effective -rw-r—r--. 1 root root 0 Mar 13 14:48 cpuset.cpus.partition -rw-r—r--. 1 root root 0 Mar 13 14:48 cpuset.mems -r—r—r--. 1 root root 0 Mar 13 14:48 cpuset.mems.effective -r—r—r--. 1 root root 0 Mar 13 14:48 cpu.stat -rw-r—r--. 1 root root 0 Mar 13 14:48 cpu.weight -rw-r—r--. 1 root root 0 Mar 13 14:48 cpu.weight.nice -rw-r—r--. 1 root root 0 Mar 13 14:48 io.pressure -rw-r—r--. 1 root root 0 Mar 13 14:48 memory.pressureO exemplo de saída mostra arquivos como
cpuset.cpusecpu.max. Os arquivos são específicos para os controladorescpusetecpuque você habilitou para os grupos de controle infantil direto da raiz (/cgroups-v2/) usando o arquivo/cgroups-v2/cgroup.subtree_control. Além disso, há arquivos de interface de controlecgroupgerais comocgroup.procsoucgroup.controllers, que são comuns a todos os grupos de controle, independentemente dos controladores habilitados.Por padrão, o recém-criado grupo de sub-controle herdou o acesso a todos os recursos da CPU do sistema sem um limite.
Certifique-se de que os processos que você deseja limitar competem pelo tempo de CPU na mesma CPU:
# echo "1" > /cgroups-v2/Example/cpuset.cpusO comando anterior assegura os processos que você colocou no grupo de sub-controle
Example, competindo na mesma CPU. Esta configuração é importante para que o controladorcpuseja ativado.ImportanteO controlador
cpusó é ativado se o grupo de sub-controle relevante tiver pelo menos 2 processos, que competem pelo tempo em uma única CPU.Configurar os limites da CPU do grupo de controle:
# echo "200000 1000000" > /cgroups-v2/Example/cpu.maxO primeiro valor é a quota de tempo permitida em microssegundos para a qual todos os processos coletivamente em um grupo de sub-controle podem ser executados durante um período (especificado pelo segundo valor). Durante um único período, quando os processos em um grupo de controle esgotam coletivamente todo o tempo especificado por esta cota, eles são acelerados durante o restante do período e não podem funcionar até o período seguinte.
O comando exemplo estabelece os limites de tempo da CPU para que todos os processos coletivamente no grupo de sub-controle
Examplepossam ser executados na CPU apenas por 0,2 segundos a cada 1 segundo.Opcionalmente, verificar os limites:
# cat /cgroups-v2/Example/cpu.max 200000 1000000Adicione os PIDs das aplicações ao grupo de sub-controle
Example:# echo "5473" > /cgroups-v2/Example/cgroup.procs # echo "5439" > /cgroups-v2/Example/cgroup.procs
Os comandos de exemplo asseguram que as aplicações desejadas se tornem membros do grupo de sub-controle
Examplee, portanto, não excedam os limites de CPU configurados para o grupo de sub-controleExample.Verificar se as aplicações são executadas no grupo de controle especificado:
# cat /proc/5473/cgroup /proc/5439/cgroup 1:name=systemd:/user.slice/user-1000.slice/user@1000.service/gnome-terminal-server.service 0::/Example 1:name=systemd:/user.slice/user-1000.slice/user@1000.service/gnome-terminal-server.service 0::/ExampleO exemplo de saída acima mostra que os processos das aplicações desejadas são executados no grupo de sub-controle
Example.Inspecione o consumo atual da CPU de suas aplicações aceleradas:
# top top - 15:56:27 up 4:02, 1 user, load average: 0.03, 0.41, 0.55 Tasks: 265 total, 4 running, 261 sleeping, 0 stopped, 0 zombie %Cpu(s): 9.6 us, 0.8 sy, 0.0 ni, 89.4 id, 0.0 wa, 0.2 hi, 0.0 si, 0.0 st MiB Mem : 1826.8 total, 243.4 free, 1102.1 used, 481.3 buff/cache MiB Swap: 1536.0 total, 1526.2 free, 9.8 used. 565.5 avail Mem PID USER PR NI VIRT RES SHR S %CPU %MEM TIME+ COMMAND 5439 root 20 0 222616 3420 3052 R 10.0 0.2 6:15.83 cpu_load_generator 5473 root 20 0 228440 1740 1456 R 10.0 0.1 9:20.65 sha1sum 2753 jdoe 20 0 743928 35328 20608 S 0.7 1.9 0:20.36 gnome-terminal- 2170 jdoe 20 0 3599688 208820 67552 S 0.3 11.2 1:33.06 gnome-shell 5934 root 20 0 274428 5064 4176 R 0.3 0.3 0:00.04 top ...Observe que o consumo de CPU para os sites
PID 5439ePID 5473diminuiu para 10%. O grupo de sub-controleExamplelimita seus processos a 20% do tempo da CPU coletivamente. Como existem 2 processos no grupo de controle, cada um pode utilizar 10% do tempo da CPU.
Recursos adicionais
- Para informações sobre o conceito de grupos de controle, ver Seção 9.1, “Entendendo os grupos de controle”.
-
Para mais informações sobre controladores de recursos, consulte a seção Seção 9.2, “O que são controladores de recursos do kernel” e a página do manual
cgroups(7). -
Para mais informações sobre o sistema de arquivos virtuais
/sys/fs/, consulte a página do manualsysfs(5).
9.4. Papel do sistemad em grupos de controle versão 1
O Red Hat Enterprise Linux 8 move as configurações de gerenciamento de recursos do nível de processo para o nível de aplicação, ligando o sistema de hierarquias cgroup com a árvore de unidades systemd. Portanto, você pode gerenciar os recursos do sistema com o comando systemctl, ou modificando os arquivos da unidade systemd.
Por padrão, o gerente de sistemas e serviços systemd faz uso do slice, das unidades scope e service para organizar e estruturar os processos nos grupos de controle. O comando systemctl permite modificar ainda mais esta estrutura através da criação do slices personalizado. Além disso, systemd monta automaticamente hierarquias para importantes controladores de recursos do kernel no diretório /sys/fs/cgroup/.
Três tipos de unidade systemd são usados para o controle de recursos:
Service - Um processo ou um grupo de processos, que
systemdcomeçou de acordo com um arquivo de configuração de unidade. Os serviços encapsulam os processos especificados para que eles possam ser iniciados e parados como um conjunto. Os serviços são nomeados da seguinte forma:<name>.serviceScope - Um grupo de processos criados externamente. Os escopos encapsulam processos que são iniciados e interrompidos pelos processos arbitrários através da função
fork()e depois registrados porsystemdem tempo de execução. Por exemplo, sessões de usuários, contêineres e máquinas virtuais são tratados como escopos. Os escopos são nomeados da seguinte forma:<name>.scopeSlice - Um grupo de unidades organizadas hierarquicamente. As fatias organizam uma hierarquia na qual são colocados os escopos e serviços. Os processos reais estão contidos em escopos ou em serviços. Cada nome de uma unidade de fatias corresponde ao caminho para um local na hierarquia. O traço ("-") funciona como um separador dos componentes do caminho para uma fatia da fatia da raiz de
-.slice. No exemplo a seguir:<parent-name>.sliceparent-name.sliceé uma subplaca deparent.slice, que é uma subplaca da fatia de raiz de-.slice.parent-name.slicepode ter sua própria subplaca chamadaparent-name-name2.slice, e assim por diante.
As unidades service, scope, e slice mapeiam diretamente os objetos da hierarquia do grupo de controle. Quando estas unidades são ativadas, elas mapeiam diretamente para os caminhos do grupo de controle construídos a partir dos nomes das unidades.
O seguinte é um exemplo abreviado de uma hierarquia de grupo de controle:
Control group /: -.slice ├─user.slice │ ├─user-42.slice │ │ ├─session-c1.scope │ │ │ ├─ 967 gdm-session-worker [pam/gdm-launch-environment] │ │ │ ├─1035 /usr/libexec/gdm-x-session gnome-session --autostart /usr/share/gdm/greeter/autostart │ │ │ ├─1054 /usr/libexec/Xorg vt1 -displayfd 3 -auth /run/user/42/gdm/Xauthority -background none -noreset -keeptty -verbose 3 │ │ │ ├─1212 /usr/libexec/gnome-session-binary --autostart /usr/share/gdm/greeter/autostart │ │ │ ├─1369 /usr/bin/gnome-shell │ │ │ ├─1732 ibus-daemon --xim --panel disable │ │ │ ├─1752 /usr/libexec/ibus-dconf │ │ │ ├─1762 /usr/libexec/ibus-x11 --kill-daemon │ │ │ ├─1912 /usr/libexec/gsd-xsettings │ │ │ ├─1917 /usr/libexec/gsd-a11y-settings │ │ │ ├─1920 /usr/libexec/gsd-clipboard … ├─init.scope │ └─1 /usr/lib/systemd/systemd --switched-root --system --deserialize 18 └─system.slice ├─rngd.service │ └─800 /sbin/rngd -f ├─systemd-udevd.service │ └─659 /usr/lib/systemd/systemd-udevd ├─chronyd.service │ └─823 /usr/sbin/chronyd ├─auditd.service │ ├─761 /sbin/auditd │ └─763 /usr/sbin/sedispatch ├─accounts-daemon.service │ └─876 /usr/libexec/accounts-daemon ├─example.service │ ├─ 929 /bin/bash /home/jdoe/example.sh │ └─4902 sleep 1 …
O exemplo acima mostra que os serviços e escopos contêm processos e são colocados em fatias que não contêm processos próprios.
Recursos adicionais
-
Para mais informações sobre
systemd, arquivos de unidades e uma lista completa desystemdtipos de unidades, veja as seções relevantes em Configuring basic system settings. -
Para mais informações sobre controladores de recursos, consulte a seção O que são controladores de recursos do kernel e as páginas do manual
systemd.resource-control(5),cgroups(7). -
Para mais informações sobre
fork(), consulte as páginas do manualfork(2).
9.5. Usando grupos de controle versão 1 com systemd
As seções seguintes fornecem uma visão geral das tarefas relacionadas à criação, modificação e remoção dos grupos de controle (cgroups). As utilidades fornecidas pelo sistema systemd e pelo gerente de serviços são a forma preferida da gerência cgroups e serão suportadas no futuro.
9.5.1. Criação de grupos de controle versão 1 com systemd
Você pode usar o sistema systemd e o gerente de serviços para criar grupos de controle transientes e persistentes (cgroups) para estabelecer limites, priorizar ou controlar o acesso aos recursos de hardware para grupos de processos.
9.5.1.1. Criação de grupos de controle transientes
A cgroups estabelece limites para os recursos consumidos por uma unidade (serviço ou escopo) durante seu tempo de execução.
Procedimento
Para criar um grupo de controle transitório, use o comando
systemd-runno seguinte formato:# systemd-run --unit=<name> --slice=<name>.slice <command>Este comando cria e inicia um serviço transitório ou uma unidade de escopo e executa um comando personalizado em tal unidade.
-
A opção
--unit=<name>dá um nome à unidade. Se--unitnão for especificado, o nome é gerado automaticamente. -
O
--slice=<name>.slicefaz de sua unidade de serviço ou escopo um membro de uma fatia especificada. Substitua<name>.slicecom o nome de uma fatia existente (como mostrado na saída desystemctl -t slice), ou criar uma nova fatia passando um nome único. Por padrão, os serviços e escopos são criados como membros dosystem.slice. Substitua
<command>com o comando que você deseja executar no serviço ou na unidade de escopo.A seguinte mensagem é exibida para confirmar que você criou e iniciou o serviço ou o escopo com sucesso:
# Funcionando como unidade <name>.service
-
A opção
Opcionalmente, manter a unidade funcionando após a conclusão de seus processos para coletar informações sobre o tempo de execução:
# systemd-run --unit=<name> --slice=<name>.slice --remain-after-exit <command>O comando cria e inicia uma unidade de serviço transitória e executa um comando personalizado em tal unidade. A opção
--remain-after-exitgarante que o serviço continue funcionando após a conclusão de seus processos.
Recursos adicionais
- Para mais informações sobre o conceito de grupos de controle, veja Seção 9.1, “Entendendo os grupos de controle”.
-
Para mais informações sobre o papel do
systemdnos grupos de controle, veja Seção 9.4, “Papel do sistemad em grupos de controle versão 1”. -
Para mais informações sobre
systemd, arquivos de configuração de unidades e suas localizações, e uma lista completa desystemdtipos de unidades, veja as seções relevantes em Configuring basic system settings. -
Para uma descrição detalhada de
systemd-run, incluindo outras opções e exemplos, consulte as páginas do manualsystemd-run(1).
9.5.1.2. Criação de grupos de controle persistentes
Para atribuir um grupo de controle persistente a um serviço, é necessário editar seu arquivo de configuração de unidade. A configuração é preservada após o reinício do sistema, para que possa ser usada para gerenciar serviços que são iniciados automaticamente.
Procedimento
Para criar um grupo de controle persistente, execute:
# systemctl enable <name>.serviceO comando acima cria automaticamente um arquivo de configuração de unidade no diretório
/usr/lib/systemd/system/e por padrão, ele atribui<name>.servicepara a unidadesystem.slice.
Recursos adicionais
- Para mais informações sobre o conceito de grupos de controle, veja Seção 9.1, “Entendendo os grupos de controle”.
-
Para mais informações sobre o papel do
systemdnos grupos de controle, veja Seção 9.4, “Papel do sistemad em grupos de controle versão 1”. -
Para mais informações sobre
systemd, arquivos de configuração de unidades e suas localizações, e uma lista completa desystemdtipos de unidades, veja as seções relevantes em Configuring basic system settings. -
Para uma descrição detalhada de
systemd-run, incluindo outras opções e exemplos, consulte as páginas do manualsystemd-run(1).
9.5.2. Modificação de grupos de controle versão 1 com systemd
Cada unidade persistente é supervisionada pelo gerente de sistema e serviços systemd, e tem um arquivo de configuração da unidade no diretório /usr/lib/systemd/system/. Para alterar as configurações de controle de recursos das unidades persistentes, modifique seu arquivo de configuração de unidade manualmente em um editor de texto ou a partir da interface de linha de comando.
9.5.2.1. Configuração das configurações de controle de recursos de memória na linha de comando
A execução de comandos na interface de linha de comando é uma das formas de estabelecer limites, priorizar ou controlar o acesso aos recursos de hardware para grupos de processos.
Procedimento
Para limitar o uso de memória de um serviço, execute o seguinte:
# systemctl set-property example.service MemoryLimit=1500KO comando atribui instantaneamente o limite de memória de 1.500 kilobytes aos processos executados em um grupo de controle ao qual o serviço
example.servicepertence. O parâmetroMemoryLimit, nesta variante de configuração, é definido no arquivo/etc/systemd/system.control/example.service.d/50-MemoryLimit.confe controla o valor do arquivo/sys/fs/cgroup/memory/system.slice/example.service/memory.limit_in_bytes.Opcionalmente, para limitar temporariamente o uso de memória de um serviço, executar:
# systemctl set-property --runtime example.service MemoryLimit=1500KO comando atribui instantaneamente o limite de memória ao serviço
example.service. O parâmetroMemoryLimité definido até a próxima reinicialização no arquivo/run/systemd/system.control/example.service.d/50-MemoryLimit.conf. Com uma reinicialização, todo o diretório/run/systemd/system.control/eMemoryLimitsão removidos.
O arquivo 50-MemoryLimit.conf armazena o limite de memória como um múltiplo de 4096 bytes - um tamanho de página de kernel específico para AMD64 e Intel 64. O número real de bytes depende de uma arquitetura de CPU.
Recursos adicionais
- Para mais informações sobre o conceito de grupos de controle, veja Seção 9.1, “Entendendo os grupos de controle”.
-
Para mais informações sobre controladores de recursos, consulte Seção 9.2, “O que são controladores de recursos do kernel” e
systemd.resource-control(5),cgroups(7)páginas do manual. -
Para mais informações sobre o papel do
systemdnos grupos de controle, veja Seção 9.4, “Papel do sistemad em grupos de controle versão 1”.
9.5.2.2. Configuração das configurações de controle de recursos de memória com arquivos de unidade
A modificação manual dos arquivos da unidade é uma das formas de estabelecer limites, priorizar ou controlar o acesso aos recursos de hardware para grupos de processos.
Procedimento
Para limitar o uso de memória de um serviço, modifique o arquivo
/usr/lib/systemd/system/example.servicecomo segue:… [Service] MemoryLimit=1500K …
A configuração acima coloca um limite ao consumo máximo de memória dos processos executados em um grupo de controle, do qual faz parte
example.service.NotaUse os sufixos K, M, G ou T para identificar Kilobyte, Megabyte, Gigabyte ou Terabyte como uma unidade de medida.
Recarregar todos os arquivos de configuração da unidade:
# systemctl daemon-reloadReinicie o serviço:
# systemctl restart example.service- Reinicie o sistema.
Opcionalmente, verifique se as mudanças entraram em vigor:
# cat /sys/fs/cgroup/memory/system.slice/example.service/memory.limit_in_bytes 1536000O exemplo mostra que o consumo de memória foi limitado em cerca de 1.500 Kilobytes.
NotaO arquivo
memory.limit_in_bytesarmazena o limite de memória como um múltiplo de 4096 bytes - um tamanho de página de kernel específico para AMD64 e Intel 64. O número real de bytes depende de uma arquitetura de CPU.
Recursos adicionais
- Para mais informações sobre o conceito de grupos de controle, veja Seção 9.1, “Entendendo os grupos de controle”.
-
Para mais informações sobre controladores de recursos, consulte Seção 9.2, “O que são controladores de recursos do kernel” e
systemd.resource-control(5),cgroups(7)páginas do manual. -
Para mais informações sobre
systemd, arquivos de configuração de unidades e suas localizações, bem como uma lista completa desystemdtipos de unidades, consulte as seções relevantes em Configuring basic system settings. -
Para mais informações sobre o papel do
systemdnos grupos de controle, veja Seção 9.4, “Papel do sistemad em grupos de controle versão 1”.
9.5.3. Remoção de grupos de controle versão 1 com systemd
Você pode usar o sistema systemd e o gerente de serviços para remover grupos de controle transientes e persistentes (cgroups) se você não precisar mais limitar, priorizar ou controlar o acesso aos recursos de hardware para grupos de processos.
9.5.3.1. Remoção de grupos de controle transientes
O cgroups transitório é liberado automaticamente quando todos os processos que uma unidade de serviço ou de escopo contém, terminam.
Procedimento
Para parar a unidade de serviço com todos os seus processos, execute:
# systemctl stop <name>.servicePara encerrar um ou mais processos da unidade, execute:
# systemctl kill <name>.service --kill-who=PID,… --signal=signalO comando acima usa a opção
--kill-whopara selecionar processo(s) do grupo de controle que você deseja encerrar. Para matar vários processos ao mesmo tempo, passe uma lista de PIDs separada por vírgula. A opção--signaldetermina o tipo de sinal POSIX a ser enviado para os processos especificados. O sinal padrão é SIGTERM.
Recursos adicionais
- Para mais informações sobre o conceito de grupos de controle, veja Seção 9.1, “Entendendo os grupos de controle”.
-
Para mais informações sobre controladores de recursos, consulte Seção 9.2, “O que são controladores de recursos do kernel” e
systemd.resource-control(5),cgroups(7)páginas do manual. -
Para mais informações sobre o papel do
systemdnos grupos de controle, veja Seção 9.4, “Papel do sistemad em grupos de controle versão 1”. -
Para mais informações sobre
systemd, arquivos de configuração de unidades e suas localizações, bem como uma lista completa desystemdtipos de unidades, consulte as seções relevantes em Configuring basic system settings.
9.5.3.2. Remoção de grupos de controle persistentes
Persistentes cgroups são liberados quando um serviço ou uma unidade de escopo é parada ou desativada e seu arquivo de configuração é excluído.
Procedimento
Parar a unidade de serviço:
# systemctl stop <name>.serviceDesativar a unidade de serviço:
# systemctl disable <name>.serviceRemover o arquivo de configuração da unidade relevante:
# rm /usr/lib/systemd/system/<name>.serviceRecarregar todos os arquivos de configuração da unidade para que as mudanças entrem em vigor:
# systemctl daemon-reload
Recursos adicionais
- Para mais informações sobre o conceito de grupos de controle, veja Seção 9.1, “Entendendo os grupos de controle”.
-
Para mais informações sobre controladores de recursos, consulte Seção 9.2, “O que são controladores de recursos do kernel” e
systemd.resource-control(5),cgroups(7)páginas do manual. -
Para mais informações sobre o papel do
systemdnos grupos de controle, veja Seção 9.4, “Papel do sistemad em grupos de controle versão 1”. -
Para mais informações sobre
systemd, arquivos de configuração de unidades e suas localizações, bem como uma lista completa desystemdtipos de unidades, consulte as seções relevantes em Configuring basic system settings. -
Para mais informações sobre os processos de matança com
systemd, consulte a página do manualsystemd.kill(5).
9.6. Obtenção de informações sobre grupos de controle versão 1
As seções seguintes descrevem como exibir várias informações sobre grupos de controle (cgroups):
-
Listagem das unidades
systemde visualização de seu status -
Visualizando a hierarquia
cgroups - Monitoramento do consumo de recursos em tempo real
9.6.1. Unidades do sistema de listagem
O procedimento a seguir descreve como utilizar o sistema systemd e o gerente de serviços para listar suas unidades.
Pré-requisitos
Procedimento
Para listar todas as unidades ativas no sistema, execute o comando
# systemctle o terminal retornará uma saída semelhante ao exemplo a seguir:# systemctl UNIT LOAD ACTIVE SUB DESCRIPTION … init.scope loaded active running System and Service Manager session-2.scope loaded active running Session 2 of user jdoe abrt-ccpp.service loaded active exited Install ABRT coredump hook abrt-oops.service loaded active running ABRT kernel log watcher abrt-vmcore.service loaded active exited Harvest vmcores for ABRT abrt-xorg.service loaded active running ABRT Xorg log watcher … -.slice loaded active active Root Slice machine.slice loaded active active Virtual Machine and Container Slice system-getty.slice loaded active active system-getty.slice system-lvm2\x2dpvscan.slice loaded active active system-lvm2\x2dpvscan.slice system-sshd\x2dkeygen.slice loaded active active system-sshd\x2dkeygen.slice system-systemd\x2dhibernate\x2dresume.slice loaded active active system-systemd\x2dhibernate\x2dresume> system-user\x2druntime\x2ddir.slice loaded active active system-user\x2druntime\x2ddir.slice system.slice loaded active active System Slice user-1000.slice loaded active active User Slice of UID 1000 user-42.slice loaded active active User Slice of UID 42 user.slice loaded active active User and Session Slice …-
UNIT- um nome de uma unidade que também reflete a posição da unidade em uma hierarquia de grupo de controle. As unidades relevantes para o controle de recursos são um slice, um scope, e um service. -
LOAD- indica se o arquivo de configuração da unidade foi carregado corretamente. Se o arquivo da unidade não foi carregado, o campo contém o estado error ao invés de loaded. Outros estados de carga da unidade são: stub , merged, e masked. -
ACTIVE- o estado de ativação da unidade de alto nível, que é uma generalização deSUB. -
SUB- o estado de ativação da unidade de baixo nível. O intervalo de valores possíveis depende do tipo de unidade. -
DESCRIPTION- a descrição do conteúdo e da funcionalidade da unidade.
-
Para listar as unidades inativas, execute:
# systemctl --allPara limitar a quantidade de informações na saída, execute:
# systemctl --type service,maskedA opção
--typerequer uma lista separada por vírgula dos tipos de unidades, como service e slice, ou estados de carga unitária, como loaded e masked.
Recursos adicionais
-
Para mais informações sobre
systemd, arquivos de unidades e uma lista completa desystemdtipos de unidades, veja as seções relevantes em Configuring basic system settings.
9.6.2. Visualizando uma hierarquia de grupo de controle versão 1
O seguinte procedimento descreve como exibir a hierarquia dos grupos de controle (cgroups) e os processos em execução em específico cgroups.
Pré-requisitos
Procedimento
Para exibir toda a hierarquia
cgroupsem seu sistema, execute# systemd-cgls:# systemd-cgls Control group /: -.slice ├─user.slice │ ├─user-42.slice │ │ ├─session-c1.scope │ │ │ ├─ 965 gdm-session-worker [pam/gdm-launch-environment] │ │ │ ├─1040 /usr/libexec/gdm-x-session gnome-session --autostart /usr/share/gdm/greeter/autostart … ├─init.scope │ └─1 /usr/lib/systemd/systemd --switched-root --system --deserialize 18 └─system.slice … ├─example.service │ ├─6882 /bin/bash /home/jdoe/example.sh │ └─6902 sleep 1 ├─systemd-journald.service └─629 /usr/lib/systemd/systemd-journald …O exemplo de saída retorna toda a hierarquia
cgroups, onde o nível mais alto é formado por slices.Para exibir a hierarquia
cgroupsfiltrada por um controlador de recursos, execute# systemd-cgls <resource_controller>:# systemd-cgls memory Controller memory; Control group /: ├─1 /usr/lib/systemd/systemd --switched-root --system --deserialize 18 ├─user.slice │ ├─user-42.slice │ │ ├─session-c1.scope │ │ │ ├─ 965 gdm-session-worker [pam/gdm-launch-environment] … └─system.slice | … ├─chronyd.service │ └─844 /usr/sbin/chronyd ├─example.service │ ├─8914 /bin/bash /home/jdoe/example.sh │ └─8916 sleep 1 …O exemplo de saída do comando acima lista os serviços que interagem com o controlador selecionado.
Para exibir informações detalhadas sobre uma determinada unidade e sua parte da hierarquia
cgroups, execute# systemctl status <system_unit>:# systemctl status example.service ● example.service - My example service Loaded: loaded (/usr/lib/systemd/system/example.service; enabled; vendor preset: disabled) Active: active (running) since Tue 2019-04-16 12:12:39 CEST; 3s ago Main PID: 17737 (bash) Tasks: 2 (limit: 11522) Memory: 496.0K (limit: 1.5M) CGroup: /system.slice/example.service ├─17737 /bin/bash /home/jdoe/example.sh └─17743 sleep 1 Apr 16 12:12:39 redhat systemd[1]: Started My example service. Apr 16 12:12:39 redhat bash[17737]: The current time is Tue Apr 16 12:12:39 CEST 2019 Apr 16 12:12:40 redhat bash[17737]: The current time is Tue Apr 16 12:12:40 CEST 2019
Recursos adicionais
-
Para mais informações sobre controladores de recursos, consulte a seção Seção 9.2, “O que são controladores de recursos do kernel” e
systemd.resource-control(5),cgroups(7)páginas do manual.
9.6.3. Visualizando os controladores de recursos
O procedimento a seguir descreve como aprender quais processos utilizam quais controladores de recursos.
Pré-requisitos
Procedimento
Para ver com quais controladores de recursos um processo interage, execute o
# cat proc/<PID>/cgroupcomando:# cat /proc/11269/cgroup 12:freezer:/ 11:cpuset:/ 10:devices:/system.slice 9:memory:/system.slice/example.service 8:pids:/system.slice/example.service 7:hugetlb:/ 6:rdma:/ 5:perf_event:/ 4:cpu,cpuacct:/ 3:net_cls,net_prio:/ 2:blkio:/ 1:name=systemd:/system.slice/example.serviceO exemplo de saída está relacionado a um processo de interesse. Neste caso, trata-se de um processo identificado por
PID 11269, que pertence à unidadeexample.service. Você pode determinar se o processo foi colocado em um grupo de controle correto, como definido pelas especificações do arquivo da unidadesystemd.NotaPor padrão, os itens e seus pedidos na lista de controladores de recursos são os mesmos para todas as unidades iniciadas por
systemd, uma vez que ele monta automaticamente todos os controladores de recursos padrão.
Recursos adicionais
-
Para mais informações sobre controladores de recursos em geral, consulte as páginas do manual
cgroups(7). -
Para uma descrição detalhada dos controladores de recursos específicos, consulte a documentação no diretório
/usr/share/doc/kernel-doc-<kernel_version>/Documentation/cgroups-v1/.
9.6.4. Monitoramento do consumo de recursos
O procedimento a seguir descreve como visualizar uma lista dos grupos de controle atualmente em funcionamento (cgroups) e seu consumo de recursos em tempo real.
Pré-requisitos
Procedimento
Para ver uma conta dinâmica de
cgroupsatualmente em execução, execute o comando# systemd-cgtop:# systemd-cgtop Control Group Tasks %CPU Memory Input/s Output/s / 607 29.8 1.5G - - /system.slice 125 - 428.7M - - /system.slice/ModemManager.service 3 - 8.6M - - /system.slice/NetworkManager.service 3 - 12.8M - - /system.slice/accounts-daemon.service 3 - 1.8M - - /system.slice/boot.mount - - 48.0K - - /system.slice/chronyd.service 1 - 2.0M - - /system.slice/cockpit.socket - - 1.3M - - /system.slice/colord.service 3 - 3.5M - - /system.slice/crond.service 1 - 1.8M - - /system.slice/cups.service 1 - 3.1M - - /system.slice/dev-hugepages.mount - - 244.0K - - /system.slice/dev-mapper-rhel\x2dswap.swap - - 912.0K - - /system.slice/dev-mqueue.mount - - 48.0K - - /system.slice/example.service 2 - 2.0M - - /system.slice/firewalld.service 2 - 28.8M - - ...O exemplo de saída exibe atualmente
cgroupsordenado pelo uso de seus recursos (CPU, memória, carga de E/S em disco). A lista é atualizada a cada 1 segundo, por padrão. Portanto, oferece uma visão dinâmica da utilização real dos recursos de cada grupo de controle.
Recursos adicionais
-
Para mais informações sobre o monitoramento dinâmico do uso de recursos, consulte as páginas do manual
systemd-cgtop(1).
9.7. O que são espaços de nomes
Namespaces são um dos métodos mais importantes para organizar e identificar objetos de software.
Um namespace envolve um recurso do sistema global (por exemplo, um ponto de montagem, um dispositivo de rede ou um nome de host) em uma abstração que faz parecer aos processos dentro do namespace que eles têm sua própria instância isolada do recurso global. Uma das tecnologias mais comuns que utilizam espaços de nomes são os recipientes.
As mudanças em um determinado recurso global são visíveis apenas para processos nesse espaço de nomes e não afetam o resto do sistema ou outros espaços de nomes.
Para inspecionar quais espaços de nome de um processo é membro, você pode verificar os links simbólicos no /proc/<PID>/ns/ diretório.
A tabela a seguir mostra os espaços de nomes e recursos suportados que eles isolam:
| Namespace | Isolados |
|---|---|
| Mount | Pontos de montagem |
| UTS | Nome do host e nome de domínio NIS |
| IPC | Sistema V IPC, filas de mensagens POSIX |
| PID | Identificação do processo |
| Network | Dispositivos de rede, pilhas, portos, etc |
| User | IDs de usuário e de grupo |
| Control groups | Diretório raiz do grupo de controle |
Recursos adicionais
-
Para mais informações sobre namespaces, consulte as páginas do manual
namespaces(7)ecgroup_namespaces(7). -
Para mais informações sobre
cgroups, veja Seção 9.1, “Entendendo os grupos de controle”.
Capítulo 10. Analisando o desempenho do sistema com a Coleção de Compiladores BPF
Como administrador de sistemas, use a biblioteca BPF Compiler Collection (BCC) para criar ferramentas para analisar o desempenho de seu sistema operacional Linux e coletar informações, que podem ser difíceis de obter através de outras interfaces.
10.1. Uma introdução ao BCC
BPF Compiler Collection (BCC) é uma biblioteca, que facilita a criação dos programas ampliados de Filtro de Pacotes Berkeley (eBPF). A principal utilidade dos programas eBPF é analisar o desempenho do sistema operacional e o desempenho da rede sem ter problemas de overhead ou de segurança.
BCC elimina a necessidade de os usuários conhecerem detalhes técnicos profundos do eBPF, e fornece muitos pontos de partida prontos para uso, tais como o pacote bcc-tools com programas eBPF pré-criados.
Os programas eBPF são acionados em eventos, tais como E/S de disco, conexões TCP e criações de processo. É improvável que os programas causem o colapso, loop ou tornem-se insensíveis por funcionarem em uma máquina virtual segura no kernel.
10.2. Instalando o pacote bcc-tools
Esta seção descreve como instalar o pacote bcc-tools, que também instala a biblioteca BPF Compiler Collection (BCC) como uma dependência.
Pré-requisitos
- Um ativo Red Hat Enterprise Linux subscription
-
Um enabled repository contendo o pacote
bcc-tools - Kernel atualizado
- Permissões de raiz.
Procedimento
Instale
bcc-tools:#yum install bcc-toolsAs ferramentas BCC estão instaladas no diretório
/usr/share/bcc/tools/.Opcionalmente, inspecionar as ferramentas:
#ll /usr/share/bcc/tools/... -rwxr-xr-x. 1 root root 4198 Dec 14 17:53 dcsnoop -rwxr-xr-x. 1 root root 3931 Dec 14 17:53 dcstat -rwxr-xr-x. 1 root root 20040 Dec 14 17:53 deadlock_detector -rw-r--r--. 1 root root 7105 Dec 14 17:53 deadlock_detector.c drwxr-xr-x. 3 root root 8192 Mar 11 10:28 doc -rwxr-xr-x. 1 root root 7588 Dec 14 17:53 execsnoop -rwxr-xr-x. 1 root root 6373 Dec 14 17:53 ext4dist -rwxr-xr-x. 1 root root 10401 Dec 14 17:53 ext4slower ...O diretório
docna lista acima contém documentação para cada ferramenta.
10.3. Utilização de ferramentas bcc selecionadas para análises de desempenho
Esta seção descreve como usar certos programas pré-criados da biblioteca da BPF Compiler Collection (BCC) para analisar de forma eficiente e segura o desempenho do sistema em cada evento. O conjunto de programas pré-criados na biblioteca do BCC pode servir como exemplos para a criação de programas adicionais.
Pré-requisitos
- Biblioteca BCC instalada
- Permissões de raiz
Usando o execsnoop para examinar os processos do sistema
Executar o programa
execsnoopem um terminal:# /usr/share/bcc/tools/execsnoopEm outro terminal executar, por exemplo:
$ ls /usr/share/bcc/tools/doc/O acima exposto cria um processo de curta duração do comando
ls.O terminal rodando
execsnoopmostra a saída semelhante ao seguinte:PCOMM PID PPID RET ARGS ls 8382 8287 0 /usr/bin/ls --color=auto /usr/share/bcc/tools/doc/ sed 8385 8383 0 /usr/bin/sed s/^ *[0-9]\+ *// ...
O programa
execsnoopimprime uma linha de saída para cada novo processo, o que consome recursos do sistema. Ele até detecta processos de programas que rodam muito em breve, tais comols, e a maioria das ferramentas de monitoramento não os registrariam.A saída
execsnoopexibe os seguintes campos:-
PCOMM - O nome do processo pai. (
ls) -
PID - A identificação do processo. (
8382) -
PPID - O ID do processo pai. (
8287) -
RET - O valor de retorno da chamada ao sistema
exec()(0), que carrega o código do programa em novos processos. - ARGS - A localização do programa iniciado com argumentos.
-
PCOMM - O nome do processo pai. (
Para ver mais detalhes, exemplos e opções para execsnoop, consulte o arquivo /usr/share/bcc/tools/doc/execsnoop_example.txt.
Para mais informações sobre exec(), consulte as páginas do manual exec(3).
Usando o opensnoop para rastrear quais arquivos um comando abre
Executar o programa
opensnoopem um terminal:# /usr/share/bcc/tools/opensnoop -n unameA saída de impressões acima para arquivos, que são abertos somente pelo processo do comando
uname.Em outro terminal executar:
$ unameO comando acima abre certos arquivos, que são capturados na próxima etapa.
O terminal rodando
opensnoopmostra a saída semelhante ao seguinte:PID COMM FD ERR PATH 8596 uname 3 0 /etc/ld.so.cache 8596 uname 3 0 /lib64/libc.so.6 8596 uname 3 0 /usr/lib/locale/locale-archive ...
O programa
opensnoopobserva a chamada do sistemaopen()em todo o sistema, e imprime uma linha de saída para cada arquivo queunametentou abrir pelo caminho.A saída
opensnoopexibe os seguintes campos:-
PID - A identificação do processo. (
8596) -
COMM - O nome do processo. (
uname) -
FD - O descritor de arquivo - um valor que
open()retorna para se referir ao arquivo aberto. (3) - ERR - Qualquer erro.
PATH - A localização dos arquivos que
open()tentou abrir.Se um comando tentar ler um arquivo inexistente, então a coluna
FDretorna-1e a colunaERRimprime um valor correspondente ao erro relevante. Como resultado,opensnooppode ajudá-lo a identificar uma aplicação que não se comporta corretamente.
-
PID - A identificação do processo. (
Para ver mais detalhes, exemplos e opções para opensnoop, consulte o arquivo /usr/share/bcc/tools/doc/opensnoop_example.txt.
Para mais informações sobre open(), consulte as páginas do manual open(2).
Utilização de biotop para examinar as operações de E/S no disco
Executar o programa
biotopem um terminal:# /usr/share/bcc/tools/biotop 30O comando permite monitorar os processos superiores, que realizam operações de E/S no disco. O argumento garante que o comando produzirá um resumo de 30 segundos.
NotaQuando nenhum argumento é fornecido, a tela de saída, por padrão, é atualizada a cada 1 segundo.
Em outro terminal executar, por exemplo :
# dd if=/dev/vda of=/dev/zeroO comando acima lê o conteúdo do dispositivo de disco rígido local e grava a saída para o arquivo
/dev/zero. Esta etapa gera certo tráfego de E/S para ilustrarbiotop.O terminal rodando
biotopmostra a saída semelhante ao seguinte:PID COMM D MAJ MIN DISK I/O Kbytes AVGms 9568 dd R 252 0 vda 16294 14440636.0 3.69 48 kswapd0 W 252 0 vda 1763 120696.0 1.65 7571 gnome-shell R 252 0 vda 834 83612.0 0.33 1891 gnome-shell R 252 0 vda 1379 19792.0 0.15 7515 Xorg R 252 0 vda 280 9940.0 0.28 7579 llvmpipe-1 R 252 0 vda 228 6928.0 0.19 9515 gnome-control-c R 252 0 vda 62 6444.0 0.43 8112 gnome-terminal- R 252 0 vda 67 2572.0 1.54 7807 gnome-software R 252 0 vda 31 2336.0 0.73 9578 awk R 252 0 vda 17 2228.0 0.66 7578 llvmpipe-0 R 252 0 vda 156 2204.0 0.07 9581 pgrep R 252 0 vda 58 1748.0 0.42 7531 InputThread R 252 0 vda 30 1200.0 0.48 7504 gdbus R 252 0 vda 3 1164.0 0.30 1983 llvmpipe-1 R 252 0 vda 39 724.0 0.08 1982 llvmpipe-0 R 252 0 vda 36 652.0 0.06 ...
A saída
biotopexibe os seguintes campos:-
PID - A identificação do processo. (
9568) -
COMM - O nome do processo. (
dd) -
DISK - O disco que realiza as operações lidas. (
vda) - I/O - O número de operações lidas realizadas. (16294)
- Kbytes - A quantidade de Kbytes alcançados pelas operações lidas. (14,440,636)
- AVGms - O tempo médio de E/S das operações lidas. (3.69)
-
PID - A identificação do processo. (
Para ver mais detalhes, exemplos e opções para biotop, consulte o arquivo /usr/share/bcc/tools/doc/biotop_example.txt.
Para mais informações sobre dd, consulte as páginas do manual dd(1).
Usando xfsslower para expor operações de sistema de arquivo inesperadamente lentas
Executar o programa
xfsslowerem um terminal:# /usr/share/bcc/tools/xfsslower 1O comando acima mede o tempo que o sistema de arquivos XFS gasta em operações de leitura, escrita, abertura ou sincronização (
fsync). O argumento1garante que o programa mostra apenas as operações que são mais lentas do que 1 ms.NotaQuando nenhum argumento é fornecido,
xfsslowerpor padrão exibe operações mais lentas do que 10 ms.Em outro terminal executar, por exemplo, o seguinte:
$ vim textO comando acima cria um arquivo de texto no editor
vimpara iniciar certa interação com o sistema de arquivos XFS.O terminal rodando
xfsslowermostra algo semelhante ao salvar o arquivo da etapa anterior:TIME COMM PID T BYTES OFF_KB LAT(ms) FILENAME 13:07:14 b'bash' 4754 R 256 0 7.11 b'vim' 13:07:14 b'vim' 4754 R 832 0 4.03 b'libgpm.so.2.1.0' 13:07:14 b'vim' 4754 R 32 20 1.04 b'libgpm.so.2.1.0' 13:07:14 b'vim' 4754 R 1982 0 2.30 b'vimrc' 13:07:14 b'vim' 4754 R 1393 0 2.52 b'getscriptPlugin.vim' 13:07:45 b'vim' 4754 S 0 0 6.71 b'text' 13:07:45 b'pool' 2588 R 16 0 5.58 b'text' ...
Cada linha acima representa uma operação no sistema de arquivo, que levou mais tempo do que um determinado limite.
xfssloweré bom em expor possíveis problemas no sistema de arquivo, que podem tomar a forma de operações inesperadamente lentas.A saída
xfsslowerexibe os seguintes campos:-
COMM - O nome do processo. (
b’bash') T - O tipo de operação. (
R)- Read
- Writo
- Sync
- OFF_KB - O arquivo compensado em KB. (0)
- FILENAME - O arquivo sendo lido, escrito, ou sincronizado.
-
COMM - O nome do processo. (
Para ver mais detalhes, exemplos e opções para xfsslower, consulte o arquivo /usr/share/bcc/tools/doc/xfsslower_example.txt.
Para mais informações sobre fsync, consulte as páginas do manual fsync(2).
Capítulo 11. Aumentar a segurança com o subsistema de integridade do kernel
Você pode aumentar a proteção de seu sistema utilizando componentes do subsistema de integridade do kernel. As seções seguintes introduzem os componentes relevantes e fornecem orientações sobre sua configuração.
11.1. O subsistema de integridade do kernel
O subsistema de integridade é uma parte do núcleo que é responsável pela manutenção da integridade geral dos dados do sistema. Este subsistema ajuda a manter o estado de um determinado sistema o mesmo desde o momento em que foi construído, evitando assim modificações indesejáveis em arquivos específicos do sistema por parte dos usuários.
O subsistema de integridade do núcleo é composto por dois componentes principais:
- Arquitetura de Medição de Integridade (IMA)
- Mede o conteúdo dos arquivos sempre que ele é executado ou aberto. Os usuários podem mudar este comportamento aplicando políticas personalizadas.
- Coloca os valores medidos dentro do espaço de memória do núcleo, evitando assim qualquer modificação por parte dos usuários do sistema.
- Permite que as partes locais e remotas verifiquem os valores medidos.
- Módulo de Verificação Estendida (EVM)
- Protege os atributos estendidos dos arquivos (também conhecidos como xattr) que estão relacionados à segurança do sistema, como as medidas IMA e os atributos SELinux, através da criptografia de seus valores correspondentes.
Tanto a IMA quanto a EVM também contêm numerosas extensões de recursos que trazem funcionalidade adicional. Por exemplo, a IMA:
- IMA-Avaliação
- Fornece validação local do conteúdo do arquivo atual em relação aos valores previamente armazenados no arquivo de medição dentro da memória do kernel. Esta extensão proíbe qualquer operação a ser realizada sobre um arquivo específico, caso a medida atual e a anterior não coincidam.
- Assinaturas Digitais EVM
- Permite que as assinaturas digitais sejam utilizadas através de chaves criptográficas armazenadas no chaveiro do kernel.
As extensões das características se complementam, mas é possível configurá-las e utilizá-las independentemente umas das outras.
O subsistema de integridade do kernel pode aproveitar o Módulo de Plataforma Confiável (TPM) para endurecer ainda mais a segurança do sistema. O TPM é uma especificação do Trusted Computing Group (TCG) para funções criptográficas importantes. Os TPMs são normalmente construídos como hardware dedicado que é anexado à placa-mãe da plataforma e evita ataques baseados em software, fornecendo funções criptográficas a partir de uma área protegida e à prova de adulteração do chip de hardware. Algumas das características do TPM são:
- Gerador de números aleatórios
- Gerador e armazenamento seguro para chaves criptográficas
- Gerador Hashing
- Atestado remoto
Recursos adicionais
- Para detalhes sobre o subsistema de integridade do kernel, veja o official upstream wiki page.
- Para mais informações sobre o TPM, consulte o Trusted Computing Group resources.
11.2. Arquitetura de medição de integridade
A Arquitetura de Medição de Integridade (IMA) é um componente do subsistema de integridade do kernel. A IMA tem como objetivo manter o conteúdo dos arquivos locais. Especificamente, a IMA mede, armazena e avalia os hashes dos arquivos antes que eles sejam acessados, o que impede a leitura e execução de dados não confiáveis. Desta forma, a IMA aumenta a segurança do sistema.
11.3. Módulo de verificação ampliado
O Módulo de Verificação Estendida (EVM) é um componente do subsistema de integridade do kernel, que monitora mudanças nos atributos estendidos dos arquivos (xattr). Muitas tecnologias orientadas à segurança, incluindo a Arquitetura de Medição de Integridade (IMA), armazenam informações de arquivos sensíveis, tais como hashes de conteúdo, nos atributos estendidos. O EVM cria outro hash a partir destes atributos estendidos e de uma chave especial, que é carregada no momento da inicialização. O hash resultante é validado toda vez que o atributo estendido é utilizado. Por exemplo, quando a IMA avalia o arquivo.
A RHEL 8 aceita a chave especial criptografada sob o chaveiro evm-key. A chave foi criada por um master key mantido nos chaveiros do kernel.
11.4. Chaves confiáveis e criptografadas
A seção seguinte apresenta chaves confiáveis e criptografadas como uma parte importante do aumento da segurança do sistema.
Trusted e encrypted keys são chaves simétricas de comprimento variável geradas pelo kernel que utilizam o serviço de chaveiro do kernel. O fato de este tipo de chaves nunca aparecer no espaço do usuário de forma não criptografada significa que sua integridade pode ser verificada, o que por sua vez significa que elas podem ser usadas, por exemplo, pelo módulo de verificação estendida (EVM) para verificar e confirmar a integridade de um sistema em execução. Os programas em nível de usuário só podem acessar as chaves sob a forma de criptografia blobs.
As chaves confiáveis precisam de um componente de hardware: o chip Trusted Platform Module (TPM), que é usado para criar e criptografar (selar) as chaves. O TPM sela as chaves usando uma chave RSA de 2048 bits chamada storage root key (SRK).
Para usar uma especificação TPM 1.2, habilite-a e ative-a através de um ajuste no firmware da máquina ou usando o comando tpm_setactive do pacote tpm-tools de utilidades. Também é necessário instalar a pilha de software TrouSers e executar o daemon tcsd para se comunicar com o TPM (hardware dedicado). O daemon tcsd faz parte da suíte TrouSers, que está disponível através do pacote trousers. O TPM 2.0, mais recente e retroativo, usa uma pilha de software diferente, onde os utilitários tpm2-tools ou ibm-tss fornecem acesso ao hardware dedicado.
Além disso, o usuário pode selar as chaves confiáveis com um conjunto específico dos valores TPM's platform configuration register (PCR). A PCR contém um conjunto de valores de gerenciamento de integridade que refletem o firmware, o carregador de inicialização e o sistema operacional. Isto significa que as chaves seladas por PCR só podem ser descriptografadas pelo TPM no mesmo sistema em que foram criptografadas. Entretanto, uma vez que uma chave confiável selada PCR é carregada (adicionada a um chaveiro), e assim seus valores PCR associados são verificados, ela pode ser atualizada com novos (ou futuros) valores PCR, de modo que um novo kernel, por exemplo, possa ser inicializado. Uma única chave também pode ser salva como múltiplos blobs, cada um com diferentes valores de PCR.
As chaves criptografadas não requerem um TPM, pois utilizam o kernel Advanced Encryption Standard (AES), o que as torna mais rápidas do que chaves confiáveis. As chaves criptografadas são criadas usando números aleatórios gerados pelo kernel e criptografadas por um master key quando são exportadas para blobs de espaço do usuário. A chave mestra é uma chave confiável ou uma chave do usuário. Se a chave mestra não for confiável, a chave criptografada é apenas tão segura quanto a chave do usuário usada para criptografá-la.
11.4.1. Trabalhando com chaves confiáveis
A seção seguinte descreve como criar, exportar, carregar ou atualizar chaves confiáveis com o utilitário keyctl para melhorar a segurança do sistema.
Pré-requisitos
-
Para a arquitetura ARM de 64 bits e IBM Z, o módulo do kernel
trustedprecisa ser carregado. Para mais informações sobre como carregar os módulos do kernel, veja Capítulo 3, Gerenciando módulos do núcleo. - O Módulo de Plataforma Confiável (TPM) precisa estar habilitado e ativo. Para mais informações sobre o TPM veja, O subsistema de integridade do kernel e chaves confiáveis e criptografadas.
Procedimento
Para criar uma chave de confiança usando um TPM, execute:
# keyctl add trusted <name> "new <key_length> [options]" <key_ring>Com base na sintaxe, construa um comando de exemplo como se segue:
# keyctl add trusted kmk "new 32" @u 642500861O comando cria uma chave de confiança chamada
kmkcom o comprimento de 32 bytes (256 bits) e a coloca no chaveiro do usuário (@u). As chaves podem ter um comprimento de 32 a 128 bytes (256 a 1024 bits).
Para listar a estrutura atual dos chaveiros do kernel:
# keyctl show Session Keyring -3 --alswrv 500 500 keyring: ses 97833714 --alswrv 500 -1 \ keyring: uid.1000 642500861 --alswrv 500 500 \ trusted: kmk
Para exportar a chave para um blob de espaço do usuário, execute:
# keyctl pipe 642500861 > kmk.blobO comando utiliza o subcomando
pipee o número de série dekmk.Para carregar a chave confiável do blob de espaço do usuário, use o sub-comando
addcom o blob como argumento:# keyctl add trusted kmk "load `cat kmk.blob`" @u 268728824Criar chaves criptografadas seguras com base na chave de confiança selada por TPM:
# keyctl add encrypted <name> "new [format] <key_type>:<primary_key_name> <keylength>" <key_ring>Com base na sintaxe, gerar uma chave criptografada utilizando a chave de confiança já criada:
# keyctl add encrypted encr-key "new trusted:kmk 32" @u 159771175O comando utiliza a chave de confiança selada TPM (
kmk), produzida na etapa anterior, como um primary key para a geração de chaves criptografadas.
Recursos adicionais
-
Para informações detalhadas sobre o uso de
keyctl, consulte a página do manualkeyctl(1). - Para mais informações sobre chaves confiáveis e criptografadas, veja Seção 11.4, “Chaves confiáveis e criptografadas”.
- Para mais informações sobre o serviço de chaveiro do kernel, veja a documentação do kernel a montante.
- Para mais informações sobre o TPM, ver Seção 11.1, “O subsistema de integridade do kernel”.
11.4.2. Trabalhando com chaves criptografadas
A seção seguinte descreve o gerenciamento de chaves criptografadas para melhorar a segurança do sistema em sistemas onde um Módulo de Plataforma Confiável (TPM) não está disponível.
Pré-requisitos
-
Para a arquitetura ARM de 64 bits e IBM Z, o módulo do kernel
encrypted-keysprecisa ser carregado. Para mais informações sobre como carregar os módulos do kernel, veja Capítulo 3, Gerenciando módulos do núcleo.
Procedimento
Use uma seqüência aleatória de números para gerar uma chave de usuário:
# keyctl add user kmk-user “dd if=/dev/urandom bs=1 count=32 2>/dev/null” @u 427069434O comando gera uma chave de usuário chamada
kmk-userque atua como um primary key e é usada para selar as chaves criptografadas reais.Gerar uma chave criptografada usando a chave primária da etapa anterior:
# keyctl add encrypted encr-key "new user:kmk-user 32" @u 1012412758Opcionalmente, liste todas as chaves no chaveiro do usuário especificado:
# keyctl list @u 2 keys in keyring: 427069434: --alswrv 1000 1000 user: kmk-user 1012412758: --alswrv 1000 1000 encrypted: encr-key
Tenha em mente que as chaves criptografadas que não são seladas por uma chave primária confiável são apenas tão seguras quanto a chave primária do usuário (chave de número aleatório) que foi usada para criptografá-las. Portanto, a chave primária do usuário deve ser carregada com a maior segurança possível e de preferência cedo durante o processo de inicialização.
Recursos adicionais
-
Para informações detalhadas sobre o uso de
keyctl, consulte a página do manualkeyctl(1). - Para mais informações sobre o serviço de chaveiro do kernel, veja a documentação do kernel a montante.
11.5. Possibilitando a arquitetura de medição de integridade e módulo de verificação ampliado
A arquitetura de medição de integridade (IMA) e o módulo de verificação estendida (EVM) pertencem ao subsistema de integridade do núcleo e aumentam a segurança do sistema de várias maneiras. A seção seguinte descreve como habilitar e configurar a IMA e EVM para melhorar a segurança do sistema operacional.
Pré-requisitos
Verifique se o sistema de arquivos
securityfsestá montado no diretório/sys/kernel/security/e se o diretório/sys/kernel/security/integrity/ima/existe.# mount … securityfs on /sys/kernel/security type securityfs (rw,nosuid,nodev,noexec,relatime) …Verifique se o gerente de serviços
systemdjá está remendado para apoiar a IMA e a EVM no momento da inicialização:# dmesg | grep -i -e EVM -e IMA [ 0.000000] Command line: BOOT_IMAGE=(hd0,msdos1)/vmlinuz-4.18.0-167.el8.x86_64 root=/dev/mapper/rhel-root ro crashkernel=auto resume=/dev/mapper/rhel-swap rd.lvm.lv=rhel/root rd.lvm.lv=rhel/swap rhgb quiet [ 0.000000] kvm-clock: cpu 0, msr 23601001, primary cpu clock [ 0.000000] Using crashkernel=auto, the size chosen is a best effort estimation. [ 0.000000] Kernel command line: BOOT_IMAGE=(hd0,msdos1)/vmlinuz-4.18.0-167.el8.x86_64 root=/dev/mapper/rhel-root ro crashkernel=auto resume=/dev/mapper/rhel-swap rd.lvm.lv=rhel/root rd.lvm.lv=rhel/swap rhgb quiet [ 0.911527] ima: No TPM chip found, activating TPM-bypass! [ 0.911538] ima: Allocated hash algorithm: sha1 [ 0.911580] evm: Initialising EVM extended attributes: [ 0.911581] evm: security.selinux [ 0.911581] evm: security.ima [ 0.911582] evm: security.capability [ 0.911582] evm: HMAC attrs: 0x1 [ 1.715151] systemd[1]: systemd 239 running in system mode. (+PAM +AUDIT +SELINUX +IMA -APPARMOR +SMACK +SYSVINIT +UTMP +LIBCRYPTSETUP +GCRYPT +GNUTLS +ACL +XZ +LZ4 +SECCOMP +BLKID +ELFUTILS +KMOD +IDN2 -IDN +PCRE2 default-hierarchy=legacy) [ 3.824198] fbcon: qxldrmfb (fb0) is primary device [ 4.673457] PM: Image not found (code -22) [ 6.549966] systemd[1]: systemd 239 running in system mode. (+PAM +AUDIT +SELINUX +IMA -APPARMOR +SMACK +SYSVINIT +UTMP +LIBCRYPTSETUP +GCRYPT +GNUTLS +ACL +XZ +LZ4 +SECCOMP +BLKID +ELFUTILS +KMOD +IDN2 -IDN +PCRE2 default-hierarchy=legacy)
Procedimento
Adicione os seguintes parâmetros de linha de comando do kernel:
# grubby --update-kernel=/boot/vmlinuz-$(uname -r) --args="ima_policy=appraise_tcb ima_appraise=fix evm=fix"O comando permite a IMA e EVM no modo fix para a entrada de inicialização atual e permite aos usuários reunir e atualizar as medidas da IMA.
O parâmetro de linha de comando do kernel
ima_policy=appraise_tcbgarante que o kernel utilize a política de medição padrão da Trusted Computing Base (TCB) e a etapa de avaliação. A parte de avaliação proíbe o acesso a arquivos, cujas medidas anteriores e atuais não correspondem.- Reiniciar para que as mudanças entrem em vigor.
Opcionalmente, verificar se os parâmetros foram adicionados à linha de comando do kernel:
# cat /proc/cmdline BOOT_IMAGE=(hd0,msdos1)/vmlinuz-4.18.0-167.el8.x86_64 root=/dev/mapper/rhel-root ro crashkernel=auto resume=/dev/mapper/rhel-swap rd.lvm.lv=rhel/root rd.lvm.lv=rhel/swap rhgb quiet ima_policy=appraise_tcb ima_appraise=fix evm=fixCriar uma chave mestra do núcleo para proteger a chave EVM:
# keyctl add user kmk dd if=/dev/urandom bs=1 count=32 2> /dev/null @u 748544121A chave-mestra do kernel (
kmk) é mantida inteiramente na memória de espaço do kernel. O valor de 32 bytes da chave-mestra do kernelkmké gerado a partir de bytes aleatórios do arquivo/dev/urandome colocado no chaveiro do usuário (@u). O número de série da chave está na segunda linha da saída anterior.Criar uma chave EVM criptografada com base na chave
kmk:# keyctl add encrypted evm-key "new user:kmk 64" @u 641780271O comando usa
kmkpara gerar e criptografar uma chave de usuário de 64 bytes (chamadaevm-key) e a coloca no chaveiro do usuário (@u). O número de série da chave está na segunda linha da saída anterior.ImportanteÉ necessário nomear a chave do usuário como evm-key porque esse é o nome que o subsistema EVM está esperando e com o qual está trabalhando.
Criar um diretório para chaves exportadas:
# mkdir -p /etc/keys/Procure a chave
kmke exporte seu valor para um arquivo:# keyctl pipe
keyctl search @u user kmk> /etc/keys/kmk *O comando coloca o valor não criptografado da chave-mestra do kernel (
kmk) em um arquivo de localização previamente definida (/etc/keys/).Procure a chave do usuário
evm-keye exporte seu valor para um arquivo:# keyctl pipe
keyctl search @u encrypted evm-key> /etc/keys/evm-keyO comando coloca o valor codificado do usuário
evm-keyem um arquivo de localização arbitrária. Oevm-keyfoi criptografado pela chave-mestra do kernel anteriormente.Opcionalmente, veja as chaves recém-criadas:
# keyctl show Session Keyring 974575405 --alswrv 0 0 keyring: ses 299489774 --alswrv 0 65534 \ keyring: uid.0 748544121 --alswrv 0 0 \ user: kmk 641780271 --alswrv 0 0 \_ encrypted: evm-key
Você deve ser capaz de ver um resultado semelhante.
Ativar o EVM:
# echo 1 > /sys/kernel/security/evmOpcionalmente, verificar se a EVM foi inicializada:
# dmesg | tail -1 […] evm: key initialized
Recursos adicionais
- Para mais informações sobre o subsistema de integridade do kernel, veja Seção 11.1, “O subsistema de integridade do kernel”.
- Para mais informações sobre a Arquitetura de Medição de Integridade, veja Seção 11.2, “Arquitetura de medição de integridade”.
- Para mais informações sobre o Módulo de Verificação Estendida, veja Seção 11.3, “Módulo de verificação ampliado”.
- Para mais informações sobre a criação de chaves criptografadas, veja Seção 11.4, “Chaves confiáveis e criptografadas”.
11.6. Coleta de hashes de arquivo com arquitetura de medição de integridade
O primeiro nível de operação da arquitetura de medição de integridade (IMA) é a fase measurement, que permite criar hashes de arquivos e armazená-los como atributos estendidos (xattrs) desses arquivos. A seção seguinte descreve como criar e inspecionar os hashes dos arquivos.
Pré-requisitos
- Habilitar arquitetura de medição de integridade (IMA) e módulo de verificação estendida (EVM), conforme descrito em Seção 11.5, “Possibilitando a arquitetura de medição de integridade e módulo de verificação ampliado”.
Verifique se os pacotes
ima-evm-utils,attr, ekeyutilsjá estão instalados:# yum install ima-evm-utils attr keyutils Updating Subscription Management repositories. This system is registered to Red Hat Subscription Management, but is not receiving updates. You can use subscription-manager to assign subscriptions. Last metadata expiration check: 0:58:22 ago on Fri 14 Feb 2020 09:58:23 AM CET. Package ima-evm-utils-1.1-5.el8.x86_64 is already installed. Package attr-2.4.48-3.el8.x86_64 is already installed. Package keyutils-1.5.10-7.el8.x86_64 is already installed. Dependencies resolved. Nothing to do. Complete!
Procedimento
Criar um arquivo de teste:
# echo <Test_text> > test_fileA IMA e a EVM garantem que ao arquivo de exemplo
test_filesejam atribuídos valores de hash, que são armazenados como seus atributos estendidos.Inspecione os atributos estendidos do arquivo:
# getfattr -m . -d test_file # file: test_file security.evm=0sAnDIy4VPA0HArpPO/EqiutnNyBql security.ima=0sAQOEDeuUnWzwwKYk+n66h/vby3eD security.selinux="unconfined_u:object_r:admin_home_t:s0"
O exemplo anterior mostra atributos estendidos relacionados ao SELinux e aos valores de hash da IMA e EVM. O EVM adiciona ativamente um atributo estendido
security.evme detecta qualquer adulteração offline em xattrs de outros arquivos comosecurity.imaque estão diretamente relacionados à integridade do conteúdo dos arquivos. O valor do camposecurity.evmestá em Hash-based Message Authentication Code (HMAC-SHA1), que foi gerado com a chave de usuárioevm-key.
Recursos adicionais
- Para maiores informações sobre conceitos gerais de segurança no Red Hat Enterprise Linux 8, veja as seções relevantes do Security hardening.
- Para informações sobre a Arquitetura de Medição de Integridade, veja Seção 11.2, “Arquitetura de medição de integridade”.
- Para informações sobre o Módulo de Verificação Estendida, veja Seção 11.3, “Módulo de verificação ampliado”.
Capítulo 12. Utilização de funções possíveis para configurar permanentemente os parâmetros do kernel
Como um usuário experiente com bom conhecimento do Red Hat Ansible Engine, você pode usar a função kernel_settings para configurar os parâmetros do kernel em múltiplos clientes ao mesmo tempo. Esta solução:
- Fornece uma interface amigável com ajuste de entrada eficiente.
- Mantém todos os parâmetros de kernel pretendidos em um só lugar.
Após executar a função kernel_settings a partir da máquina de controle, os parâmetros do núcleo são aplicados imediatamente aos sistemas gerenciados e persistem em todas as reinicializações.
12.1. Introdução ao papel das configurações do kernel
As funções do Sistema RHEL são uma coleção de funções e módulos da Plataforma de Automação Possível que fornecem uma interface de configuração consistente para gerenciar remotamente vários sistemas.
As funções do sistema RHEL foram introduzidas para configurações automatizadas do kernel usando a função do sistema kernel_settings. O pacote rhel-system-roles contém esta função do sistema, e também a documentação de referência.
Para aplicar os parâmetros do kernel em um ou mais sistemas de forma automatizada, use a função kernel_settings com uma ou mais de suas variáveis de papel de sua escolha em um playbook. Um playbook é uma lista de uma ou mais peças que são legíveis por humanos, e são escritas no formato YAML.
Você pode usar um arquivo de inventário para definir um conjunto de sistemas que você deseja que o Ansible Engine configure de acordo com o playbook.
Com a função kernel_settings você pode configurar:
-
Os parâmetros do kernel usando a variável de função
kernel_settings_sysctl -
Vários subsistemas de kernel, dispositivos de hardware e drivers de dispositivos usando a variável de função
kernel_settings_sysfs -
A afinidade da CPU para o gerente de serviços
systemde processa-a forquilha usando a variável de funçãokernel_settings_systemd_cpu_affinity -
O subsistema de memória do kernel hugepages transparentes usando as variáveis de função
kernel_settings_transparent_hugepagesekernel_settings_transparent_hugepages_defrag
Recursos adicionais
-
Para uma referência detalhada sobre as variáveis de papel
kernel_settingse para os exemplos de playbooks, instale o pacoterhel-system-roles, e veja os arquivosREADME.mdeREADME.htmlno diretório/usr/share/doc/rhel-system-roles/kernel_settings/. - Para mais informações sobre playbooks, consulte Trabalhando com playbooks na documentação Ansible.
- Para mais informações sobre como criar e usar inventários, veja Como construir seu inventário em Documentação possível.
12.2. Aplicação de parâmetros selecionados do kernel usando a função de configuração do kernel
Siga estas etapas para preparar e aplicar um livro de exercícios possível para configurar remotamente os parâmetros do kernel com efeito persistente em múltiplos sistemas operacionais gerenciados.
Pré-requisitos
-
Sua assinatura do Red Hat Ansible Engine está anexada ao sistema, também chamado control machine, a partir do qual você deseja executar o papel
kernel_settings. Veja o artigo Como faço o download e instalo o Red Hat Ansible Engine para mais informações. - O possível repositório do motor está habilitado na máquina de controle.
O Motor Possível é instalado na máquina de controle.
NotaVocê não precisa ter o Ansible Engine instalado nos sistemas, também chamado managed hosts, onde você deseja configurar os parâmetros do kernel.
-
O pacote
rhel-system-rolesestá instalado na máquina de controle. - Um inventário de hosts gerenciados está presente na máquina de controle e o Ansible Engine é capaz de se conectar a eles.
Procedimento
Opcionalmente, revisar o arquivo
inventorypara fins de ilustração:# cat /home/jdoe/<ansible_project_name>/inventory [testingservers] pdoe@192.168.122.98 fdoe@192.168.122.226 [db-servers] db1.example.com db2.example.com [webservers] web1.example.com web2.example.com 192.0.2.42O arquivo define o grupo
[testingservers]e outros grupos. Ele permite rodar o Ansible Engine de forma mais eficaz contra uma coleção específica de sistemas.Criar um arquivo de configuração para definir padrões e escalonamento de privilégios para operações de Motores Ansíveis.
Criar um novo arquivo YAML e abri-lo em um editor de texto, por exemplo:
# vi /home/jdoe/<ansible_project_name>/ansible.cfgInsira o seguinte conteúdo no arquivo:
[defaults] inventory = ./inventory [privilege_escalation] become = true become_method = sudo become_user = root become_ask_pass = true
A seção
[defaults]especifica um caminho para o arquivo do inventário de anfitriões gerenciados. A seção[privilege_escalation]define que os privilégios do usuário sejam transferidos pararootnos hosts gerenciados especificados. Isto é necessário para uma configuração bem sucedida dos parâmetros do kernel. Quando o Ansible playbook for executado, você será solicitado a fornecer a senha do usuário. O usuário muda automaticamente pararootpor meio desudoapós conectar-se a um host gerenciado.
Criar um caderno de atividades que utilize o papel
kernel_settings.Criar um novo arquivo YAML e abri-lo em um editor de texto, por exemplo:
# vi /home/jdoe/<ansible_project_name>/kernel_roles.ymlEste arquivo representa um playbook e normalmente contém uma lista ordenada de tarefas, também chamada plays, que são executadas contra hosts gerenciados específicos selecionados a partir de seu arquivo
inventory.Insira o seguinte conteúdo no arquivo:
--- - name: Configure kernel settings hosts: testingservers vars: kernel_settings_sysctl: - name: fs.file-max value: 400000 - name: kernel.threads-max value: 65536 kernel_settings_sysfs: - name: /sys/class/net/lo/mtu value: 65000 kernel_settings_transparent_hugepages: madvise roles: - linux-system-roles.kernel_settingsA chave
nameé opcional. Ela associa uma corda arbitrária com a peça como um rótulo e identifica para que serve a peça. A chavehostsna peça especifica os anfitriões contra os quais a peça é encenada. O valor ou valores para esta chave podem ser fornecidos como nomes individuais de anfitriões gerenciados ou como grupos de anfitriões, conforme definido no arquivoinventory.A seção
varsrepresenta uma lista de variáveis contendo nomes de parâmetros e valores de kernel selecionados para os quais eles têm que ser definidos.A chave
rolesespecifica qual papel do sistema irá configurar os parâmetros e valores mencionados na seçãovars.NotaVocê pode modificar os parâmetros do kernel e seus valores no playbook para atender às suas necessidades.
Opcionalmente, verifique se a sintaxe em sua peça está correta.
# ansible-playbook --syntax-check kernel-roles.yml playbook: kernel-roles.ymlEste exemplo mostra a verificação bem sucedida de um livro de brincadeiras.
Execute seu livro de brincadeiras.
# ansible-playbook kernel-roles.yml BECOME password: PLAY [Configure kernel settings] ... PLAY RECAP ** fdoe@192.168.122.226 : ok=10 changed=4 unreachable=0 failed=0 skipped=6 rescued=0 ignored=0 pdoe@192.168.122.98 : ok=10 changed=4 unreachable=0 failed=0 skipped=6 rescued=0 ignored=0
Antes do Ansible Engine executar seu playbook, você será solicitado a obter sua senha e para que um usuário em hosts gerenciados possa ser trocado para
root, o que é necessário para configurar os parâmetros do kernel.A seção recapitulativa mostra que a peça terminou com sucesso (
failed=0) para todos os anfitriões gerenciados, e que 4 parâmetros do kernel foram aplicados (changed=4).- Reinicie seus anfitriões gerenciados e verifique os parâmetros do núcleo afetado para verificar se as mudanças foram aplicadas e persistem em todas as reinicializações.
Recursos adicionais
- Para mais informações sobre as funções do Sistema RHEL, consulte Introdução às funções do Sistema RHEL.
-
Para mais informações sobre todas as variáveis atualmente suportadas em
kernel_settings, consulte os arquivosREADME.htmleREADME.mdno diretório/usr/share/doc/rhel-system-roles/kernel_settings/. - Para mais detalhes sobre Inventários Ansíveis, consulte Trabalhando com Inventário em Documentação Possível.
- Para obter mais detalhes sobre os arquivos de configuração de Ansible, consulte Configuring Ansible in Ansible documentation.
- Para mais detalhes sobre Playbooks Ansíveis, consulte Trabalhando com Playbooks na documentação Ansible.
- Para obter mais detalhes sobre Variáveis Ansíveis, consulte Utilização de Variáveis em Documentação Possível.
- Para mais detalhes sobre os papéis possíveis, consulte Papéis em documentação possível.