
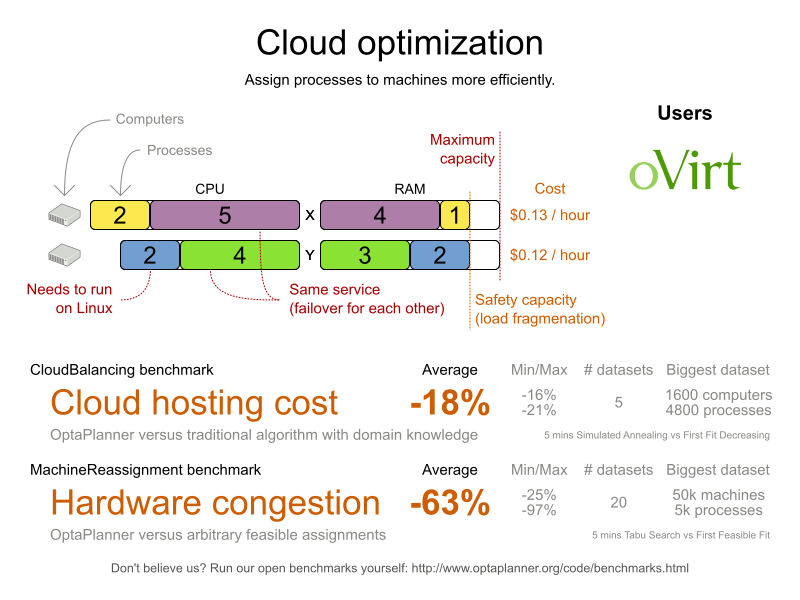
3.12. マシンの再割当て (Google ROADEF 2012)
各プロセスをマシンに割り当てます。全プロセスには、すでに元の (最適化されていない) 割り当てがあります。プロセスにはそれぞれ、各リソース (CPU、メモリーなど) が一定量必要です。これは、クラウドのバランスの例の応用です。
ハード制約:
- 最大容量: マシンに割り当てる各リソースはこの量を超えてはいけない。
- 競合: 同じサービスのプロセスは別のマシンで実行する必要がある。
- 分散: 同じサービスのプロセスは複数の場所に分散させる必要がある。
- 依存関係: 他のサービスに依存するサービスのプロセスは、そのサービスの近くで実行する必要がある。
- 一時的な使用: リソースによっては一時的なものがあり、元のマシンと、新たに割り当てられたマシンの両方の最大容量にカウントされる。
ソフト制約:
- 負荷: 各マシンの各リソースの安全容量を超えてはいけない。
- 負荷分散: 各マシンで利用可能なリソースを分散させて、今後の割り当てに対応できるように容量を空ける。
- プロセスの移動コスト: プロセスには移動コストが発生する。
- サービスの移動コスト: サービスには移動コストが発生する。
- 機械の移動コスト: マシン A からマシン B にプロセスを移動すると、A から B に固有の移動コストが別途発生する。
この問題は the Google ROADEF/EURO Challenge 2012 で定義されています。

図3.6 価値提案
問題の規模
model_a1_1 has 2 resources, 1 neighborhoods, 4 locations, 4 machines, 79 services, 100 processes and 1 balancePenalties with a search space of 10^60. model_a1_2 has 4 resources, 2 neighborhoods, 4 locations, 100 machines, 980 services, 1000 processes and 0 balancePenalties with a search space of 10^2000. model_a1_3 has 3 resources, 5 neighborhoods, 25 locations, 100 machines, 216 services, 1000 processes and 0 balancePenalties with a search space of 10^2000. model_a1_4 has 3 resources, 50 neighborhoods, 50 locations, 50 machines, 142 services, 1000 processes and 1 balancePenalties with a search space of 10^1698. model_a1_5 has 4 resources, 2 neighborhoods, 4 locations, 12 machines, 981 services, 1000 processes and 1 balancePenalties with a search space of 10^1079. model_a2_1 has 3 resources, 1 neighborhoods, 1 locations, 100 machines, 1000 services, 1000 processes and 0 balancePenalties with a search space of 10^2000. model_a2_2 has 12 resources, 5 neighborhoods, 25 locations, 100 machines, 170 services, 1000 processes and 0 balancePenalties with a search space of 10^2000. model_a2_3 has 12 resources, 5 neighborhoods, 25 locations, 100 machines, 129 services, 1000 processes and 0 balancePenalties with a search space of 10^2000. model_a2_4 has 12 resources, 5 neighborhoods, 25 locations, 50 machines, 180 services, 1000 processes and 1 balancePenalties with a search space of 10^1698. model_a2_5 has 12 resources, 5 neighborhoods, 25 locations, 50 machines, 153 services, 1000 processes and 0 balancePenalties with a search space of 10^1698. model_b_1 has 12 resources, 5 neighborhoods, 10 locations, 100 machines, 2512 services, 5000 processes and 0 balancePenalties with a search space of 10^10000. model_b_2 has 12 resources, 5 neighborhoods, 10 locations, 100 machines, 2462 services, 5000 processes and 1 balancePenalties with a search space of 10^10000. model_b_3 has 6 resources, 5 neighborhoods, 10 locations, 100 machines, 15025 services, 20000 processes and 0 balancePenalties with a search space of 10^40000. model_b_4 has 6 resources, 5 neighborhoods, 50 locations, 500 machines, 1732 services, 20000 processes and 1 balancePenalties with a search space of 10^53979. model_b_5 has 6 resources, 5 neighborhoods, 10 locations, 100 machines, 35082 services, 40000 processes and 0 balancePenalties with a search space of 10^80000. model_b_6 has 6 resources, 5 neighborhoods, 50 locations, 200 machines, 14680 services, 40000 processes and 1 balancePenalties with a search space of 10^92041. model_b_7 has 6 resources, 5 neighborhoods, 50 locations, 4000 machines, 15050 services, 40000 processes and 1 balancePenalties with a search space of 10^144082. model_b_8 has 3 resources, 5 neighborhoods, 10 locations, 100 machines, 45030 services, 50000 processes and 0 balancePenalties with a search space of 10^100000. model_b_9 has 3 resources, 5 neighborhoods, 100 locations, 1000 machines, 4609 services, 50000 processes and 1 balancePenalties with a search space of 10^150000. model_b_10 has 3 resources, 5 neighborhoods, 100 locations, 5000 machines, 4896 services, 50000 processes and 1 balancePenalties with a search space of 10^184948.
図3.7 ドメインモデル
