17.5. オーバークラウドノードのアップグレードワークフロー
各オーバークラウドノードでアップグレードを実施する場合、以下の要素を考慮して、アップグレードの各段階で実行する正しいコマンドを判断する必要があります。
コントローラーサービス
- ノードに Pacemaker サービスが含まれているか ? データベースの移行を開始し、Red Hat OpenStack 13 から 16.1 へのアップグレード時の移行を円滑に行うために一時コンテナーを起動するためには、まずブートストラップノードをアップグレードする必要があります。ブートストラップコントローラーノードのアップグレードプロセス中、新しい Pacemaker クラスターが作成され、新しい Red Hat OpenStack 16.1 コンテナーがノードで起動します。一方、残りのコントローラーノードは Red Hat OpenStack 13 で稼働を続けます。ブートストラップノードをアップグレードしたら、Pacemaker サービスが含まれるその他のノードをアップグレードし、ブートストラップノードで起動した新しい Pacemaker クラスターに各ノードが参加するようにしなければなりません。Pacemaker が含まれない split-service コントローラーノードをアップグレードするプロセスでは、これらの追加手順は必要ありません。
Compute サービス
ノードがコンピュートノードか ?ノードに Compute サービスが含まれる場合、そのノードから仮想マシンを移行して最大限の可用性を確保する必要があります。ここで言うコンピュートノードには、仮想マシンをホストするためのあらゆるノードが含まれます。この定義には、以下のコンピュートノード種別が含まれます。
- 通常のコンピュートノード
- ハイパーコンバージドインフラストラクチャー (HCI) を持つコンピュートノード
- Data Plane Development Kit (DPDK) または Single Root Input/Output Virtualization (SR-IOV) 等のネットワーク機能仮想化技術を使用するコンピュートノード
- リアルタイムコンピュートノード
Ceph Storage サービス
ノードに Ceph Storage サービスが含まれているか ?
dockerではなくpodmanを使用するために、ノード上のコンテナー化された Ceph Storage サービスのsystemdユニットファイルを変換する必要があります。以下のノード種別がこれに該当します。- Ceph Storage OSD ノード
- Ceph MON サービスが含まれるコントローラーノード
- Split-Controller Ceph MON ノード
- ハイパーコンバージドインフラストラクチャー (HCI) を持つコンピュートノード
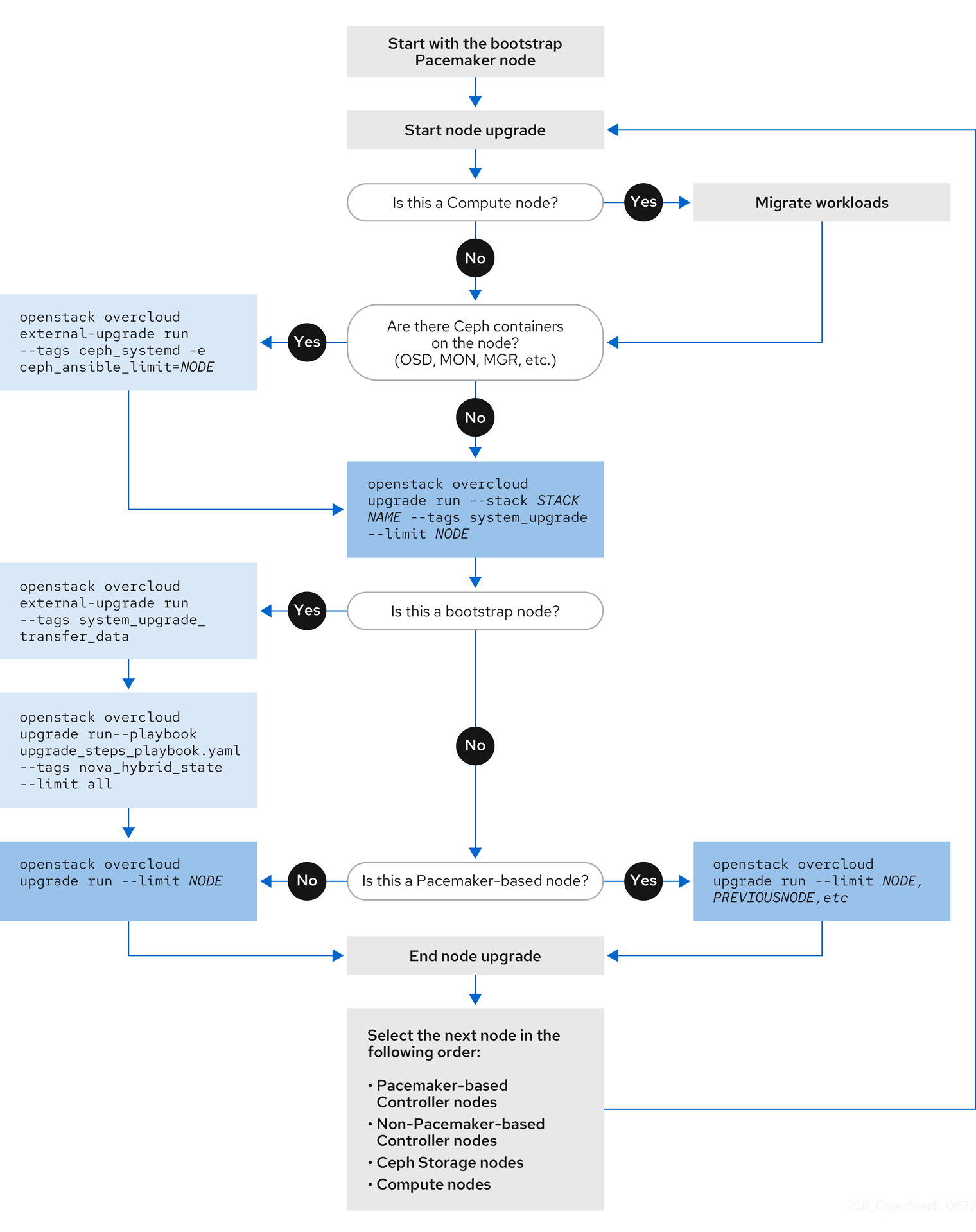
ワークフロー
以下のワークフロー図を使用して、特定ノードの正しい更新パスを特定します。