
Red Hat Training
A Red Hat training course is available for Red Hat Enterprise Linux
High Availability Add-On リファレンス
High Availability Add-On の設定および管理のためのリファレンスガイド
概要
第1章 Red Hat High Availability Add-On 設定および管理リファレンスの概要
1.1. 新機能と変更点
1.1.1. Red Hat Enterprise Linux 7.1 の新機能および変更された機能
- Red Hat Enterprise Linux 7.1 より、pcs acl コマンドを使用してローカルユーザーのパーミッションを設定し、アクセス制御リスト(ACL)を使用してクラスター設定への読み取り専用アクセスまたは読み書きアクセスを許可できます。ACL の詳細は、「ユーザーのパーミッション設定」 を参照してください。
- 「順序付けされたリソースセット」 および 「リソースのコロケーション」 が大幅に更新および明確化されました。
- 「クォーラムオプションの設定」 に、クォーラムの確立時にクラスターがすべてのノードを待たないようにする cluster quorum unblock 機能が記載されています。
- 「リソースの作成」 に、リソースグループの順序付けを設定するために使用できる pcs resource create コマンドの
beforeおよびafterパラメーターの説明が追加されました。 - Red Hat Enterprise Linux 7.1 リリースでは、クラスター設定を tarball にバックアップし、pcs config コマンドの
backupおよび restore オプションを使用して、バックアップからすべてのノードのクラスター設定ファイルを復元できます。この機能の詳細は 「クラスター設定のバックアップおよび復元」 を参照してください。 - 内容を明確にするため本書全体に小変更が加えられました。
1.1.2. Red Hat Enterprise Linux 7.2 の新機能および変更された機能
- pcs resource relocate run コマンドを使用して、現在のクラスターのステータス、制約、リソースの場所、およびその他の設定によって決定される優先ノードにリソースを移行できるようになりました。このコマンドの詳細は、「リソースの優先ノードへの移動」 を参照してください。
- 「モニタリングのリソースを使ったイベント通知」 外部プログラムを実行してクラスター通知の処理を判断するために
ClusterMonリソースを設定する方法をより深く説明するため、変更および拡張されました。 - 冗長な電源供給用のフェンスを設定する場合に各デバイスを 1 度のみ設定する必要があり、ノードのフェンシングには両方のデバイスが必要になることを指定する必要があります。冗長な電源供給にフェンスを設定する方法の詳細は、「冗長電源のフェンシング設定」 を参照してください。
- このドキュメントの 「クラスターノードの追加」 に、ノードを既存のクラスターに追加する手順が追加されました。
- 表7.1「簡単な場所の制約オプション」 の説明にあるように、新しい
resource-discoveryの場所制約オプションにより、Pacemaker が指定されたリソースのノードでリソース検出を実行すべきかどうかを指定できます。 - ドキュメント全体にわたり、記載内容の明確化を図り、若干の修正を加えました。
1.1.3. Red Hat Enterprise Linux 7.3 の新機能および変更された機能
- このバージョンでは、「pacemaker_remote サービス」 全体が書き直されました。
- アラートエージェントを使用して Pacemaker アラートを設定できます。アラートエージェントは、リソース設定と操作を処理するためにクラスター呼び出しのリソースエージェントと同様にクラスターが呼び出す外部プログラムです。Pacemaker アラートエージェントの説明は 「Pacemaker アラートエージェント (Red Hat Enterprise Linux 7.3 以降)」 を参照してください。
- このリリースでは新しいクォーラム管理コマンドがサポートされ、クォーラムの状態を表示し、
expected_votesパラメーターを変更できます。これらのコマンドの説明は 「クォーラム管理コマンド (Red Hat Enterprise Linux 7.3 以降)」 を参照してください。 - 「クォーラムオプションの変更 (Red Hat Enterprise Linux 7.3 以降)」 の説明に従って、pcs quorum update コマンドを使用してクラスターの一般的なクォーラムオプションを変更できるようになりました。
- クラスターのサードパーティー判別デバイスとして動作する個別のクォーラムデバイスを設定できます。この機能は主に、標準のクォーラムルールが許可するよりも多くのノード障害をクラスターで維持できるようにするために使用されます。この機能はテクニカルリビューとしてのみ提供されます。クォーラムデバイスの説明は 「クォーラムデバイス」 を参照してください。
- Red Hat Enterprise Linux 7.3 には、Booth クラスターチケットマネージャーを使用して複数のサイトにまたがる高可用性クラスターを設定する機能が提供されます。この機能はテクニカルリビューとしてのみ提供されます。Booth クラスターチケットマネージャーの説明は 14章Pacemaker を用いたマルチサイトクラスターの設定 を参照してください。
pacemaker_remoteサービスを実行している KVM ゲストノードを設定する場合、グループにゲストノードを含めることができます。これにより、ストレージデバイス、ファイルシステム、および VM をグループ化できます。KVM ゲストノードの設定に関する詳細は 「設定の概要: KVM ゲストノード」 を参照してください。
1.1.4. Red Hat Enterprise Linux 7.4 の新機能および変更された機能
- Red Hat Enterprise Linux 7.4 には、Booth クラスターチケットマネージャーを使用して複数のサイトにまたがる高可用性クラスターを設定する機能が完全に提供されます。Booth クラスターチケットマネージャーの説明は 14章Pacemaker を用いたマルチサイトクラスターの設定 を参照してください。
- Red Hat Enterprise Linux 7.4 は、個別のクォーラムを設定する機能に完全に対応しています。この機能は主に、標準のクォーラムルールが許可するよりも多くのノード障害をクラスターで維持できるようにするために使用されます。クォーラムデバイスの説明は 「クォーラムデバイス」 を参照してください。
- ノード名で適用した正規表現と、ノード属性とその値によってフェンシングトポロジーでノードを指定できるようになりました。フェンシングレベルの説明は、「フェンスレベルの設定」 を参照してください。
- Red Hat Enterprise Linux 7.4 は、
NodeUtilizationリソースエージェントをサポートします。これは、利用可能な CPU、ホストメモリーの可用性、およびハイパーバイザーメモリーの可用性のシステムパラメーターを検出し、これらのパラメーターを CIB に追加します。このリソースエージェントの詳細は、「NodeUtilization リソースエージェント (Red Hat Enterprise Linux 7.4 以降)」 を参照してください。 - Red Hat Enterprise Linux 7.4 では、クラスターノード add-guest コマンドおよび クラスターノード remove-guest コマンドは、cluster remote-node add および cluster remote-node remove コマンドを置き換えます。pcs cluster node add-guest コマンドはゲストノードの
authkeyをセットアップし、pcs cluster node add-remote コマンドはリモートノードのauthkeyを設定します。更新したゲストとリモートノード設定手順は、「リソースとしての仮想ドメインの設定」 を参照してください。 - Red Hat Enterprise Linux 7.4 は、
systemdresource-agents-depsターゲットに対応しています。これにより、「Pacemaker で管理されていないリソースの依存関係の起動順の設定 (Red Hat Enterprise Linux 7.4 以降)」 で説明しているように、クラスターにより管理されない依存関係を持つリソースを含むクラスターに適切な起動順序を設定できるようになります。 - マスター/スレーブクローンとしてリソースを作成するコマンドの形式は、このリリースで変更されています。マスター/スレーブクローンの作成の説明は、「多状態のリソース: 複数モードのリソース」 を参照してください。
1.1.5. Red Hat Enterprise Linux 7.5 の新機能および変更された機能
- Red Hat Enterprise Linux 7.5 では、
pcs_snmp_agentデーモンを使用して、SNMP でデータについて Pacemaker クラスターを照会できます。SNMP でのクラスター照会は、「SNMP での Pacemaker クラスターを照会 (Red Hat Enterprise Linux 7.5 以降)」 を参照してください。
1.1.6. Red Hat Enterprise Linux 7.8 の新機能および変更された機能
- Red Hat Enterprise Linux 7.8 以降では、ノードが正常にシャットダウンすると、ノードに接続されているリソースがノードにロックされ、シャットダウンしたノードがクラスターに再度参加するときに再び起動するまで、他の場所で起動できないように、Pacemaker を設定できます。これにより、ノードのリソースをクラスター内の他のノードにフェイルオーバーせずに、サービスの停止が許容できるメンテナンスウィンドウ中にノードの電源を切ることができます。ノードの正常なシャットダウン時に停止したままになるようにリソースを設定する方法は、「 クリーンノードのシャットダウンで停止するようにリソースを設定 (Red Hat Enterprise Linux 7.8 以降) 」 を参照してください。
1.2. Pacemaker 設定ツールのインストール
# yum install pcs pacemaker fence-agents-all
# yum install pcs pacemaker fence-agents-model
# rpm -q -a | grep fence
fence-agents-rhevm-4.0.2-3.el7.x86_64
fence-agents-ilo-mp-4.0.2-3.el7.x86_64
fence-agents-ipmilan-4.0.2-3.el7.x86_64
...
lvm2-cluster および gfs2-utils パッケージは ResilientStorage チャンネルに含まれます。必要に応じて次のコマンドでインストールを行ってください。
# yum install lvm2-cluster gfs2-utils1.3. ファイアウォールでクラスターコンポーネントを許可する iptables 設定
#firewall-cmd --permanent --add-service=high-availability#firewall-cmd --add-service=high-availability
表1.1 High Availability Add-On で有効にするポート
| ポート | 必要になる場合 |
|---|---|
|
TCP 2224
|
すべてのノードで必須( pcsd Web UI で必要で、ノード間通信に必要)
任意のノードの pcs が、それ自体も含め、クラスター内のすべてのノードと通信できるように、ポート 2224 を開くことが重要です。Booth クラスターチケットマネージャーまたはクォーラムデバイスを使用する場合は、Booth Arbiter、クォーラムデバイスなどのすべての関連ホストで、ポート 2224 を開く必要があります。
|
|
TCP 3121
|
クラスターに Pacemaker リモートノードがある場合に、すべてのノードで必須です。
完全なクラスターノード上の Pacemaker の
crmd デーモンは、ポート 3121 で Pacemaker リモートノードの pacemaker_remoted デーモンに接続します。クラスター通信に別のインターフェイスを使用する場合は、そのインターフェイスでポートを開くことのみが必要になります。少なくとも、ポートは、Pacemaker リモートノードの全クラスターノードに対して開いている必要があります。ユーザーは完全なノードとリモートノード間でホストを変換する可能性があるか、またはホストのネットワークを使用してコンテナー内でリモートノードを実行する可能性があるため、すべてのノードに対してポートを開くことは役に立ちます。ノード以外のホストにポートを開く必要はありません。
|
|
TCP 5403
| corosync-qnetd でクォーラムデバイスを使用する場合は、クォーラムデバイスホストで必須です。デフォルト値は、corosync-qnetd コマンドの -p オプションで変更できます。
|
|
UDP 5404
|
corosync がマルチキャスト UDP に設定されている場合には、
corosync ノードで必須です。
|
|
UDP 5405
|
すべての corosync ノードで必須(
corosyncで必要)
|
|
TCP 21064
|
DLM に必要なリソース(
clvm や GFS2など)がクラスターに含まれる場合に、すべてのノードで必須です。
|
|
TCP 9929、UDP 9929
|
Booth チケットマネージャーを使用してマルチサイトクラスターを確立するときに、すべてのクラスターノード、および同じノードのいずれかからの接続に対して Booth arbitrator ノードで開いている必要があります。
|
1.4. クラスターと Pacemaker の設定ファイル
corosync.conf および cib.xml です。
corosync.conf ファイルは、Pacemaker が構築されているクラスターマネージャーである corosync が使用するクラスターパラメーターを提供します。一般的に、corosync.conf を直接編集するのではなく、pcs または pcsd インターフェイスを使用します。ただし、このファイルを直接編集する必要のある状況も考えられます。corosync.conf ファイルの編集は、Editing the corosync.conf file in Red Hat Enterprise Linux 7 を参照してください。
cib.xml ファイルは、クラスターの設定、およびクラスターの全リソースの現在の状態を表す XML ファイルです。このファイルは Pacemaker のクラスター情報ベース (CIB) により使用されます。CIB の内容はクラスター全体で自動的に同期されます。cib.xml ファイルは直接編集せず、代わりに pcs または pcsd インターフェイスを使用してください。
1.5. クラスター設定の注意事項
- RHEL 7.7 以降、Red Hat はノード数が 32 個を超えるクラスターデプロイメントをサポートしていません。ただし、
pacemaker_remoteサービスを実行しているリモートノードでは、この制限を超えた拡張が可能です。pacemaker_remoteサービスの説明は 「pacemaker_remote サービス」 を参照してください。 - DHCP (Dynamic Host Configuration Protocol)を使用した
corosyncデーモンで使用されるネットワークインターフェイス上の IP アドレスの取得はサポートされていません。アドレスの更新中、DHCP クライアントは割り当てられたインターフェイスに対して定期的に IP アドレスを削除および再追加することができます。これにより、corosyncが接続障害を検出し、クラスターの他のノードからのフェンシングアクティビティーがハートビート接続にcorosyncを使用します。
1.6. Red Hat Enterprise Linux High Availability クラスターの更新
- ローリング更新 - サービスからノードを、一度に 1 つずつ削除し、そのソフトウェアを更新してから、そのノードをクラスターに戻します。これにより、各ノードの更新中も、クラスターがサービスの提供とリソースの管理を継続できます。
- クラスター全体の更新 - クラスター全体を停止し、更新をすべてのノードに適用してから、クラスターのバックアップを開始します。
1.7. RHEL クラスターでの VM のライブ移行についての問題
- 移行する仮想マシンで実行しているリソースやソフトウェアの停止または移動を行う前に準備を行う必要がある場合は、以下の手順を実行します。
- 管理リソースを VM から移動します。リソースの割り当てに関する特定の要件や条件がある場合は、正しいノードにリソースを配置するための新しい場所の制約を作成することを考慮してください。
- VM をスタンバイモードにして、サービスで考慮されていないことや、残りのリソースが別の場所に再配置され、停止されるようにします。
#
pcs cluster standby VM - 仮想マシンで以下のコマンドを実行して、仮想マシン上のクラスターソフトウェアを停止します。
#
pcs cluster stop - 仮想マシンのライブマイグレーションを実行します。
- 仮想マシンでクラスターサービスを起動します。
#
pcs cluster start - VM をスタンバイモードから解除します。
#
pcs cluster unstandby VM - VM をスタンバイモードにする前に一時的な場所の制約を作成した場合、これらの制約を調整または削除して、リソースが通常の優先場所に戻れるようにします。
第2章 pcsd Web UI
2.1. pcsd Web UI の設定
- 「Pacemaker 設定ツールのインストール」 の説明に従って Pacemaker 設定ツールをインストールします。
- クラスターの一部である各ノードで、passwd コマンドを使用して、各ノードで同じパスワードを使用してユーザー
haclusterのパスワードを設定します。 - 各ノードで pcsd デーモンを開始して有効にします。
#
systemctl start pcsd.service#systemctl enable pcsd.service - クラスターの 1 つのノードで、以下のコマンドを使用してクラスターを設定するノードを認証します。このコマンドを実行すると、
UsernameとPasswordの入力を求められます。Usernameにはhaclusterを指定します。#
pcs cluster auth node1 node2 ... nodeN - いずれかのシステムで、次の URL をブラウザーで開き、承認したノードの 1 つを指定します(
httpsプロトコルを使用することに注意してください)。これにより、pcsd Web UI のログイン画面が表示されます。https://nodename:2224
図2.1 クラスターの管理ページ

[D]
2.2. pcsd Web UI を用いたクラスターの作成
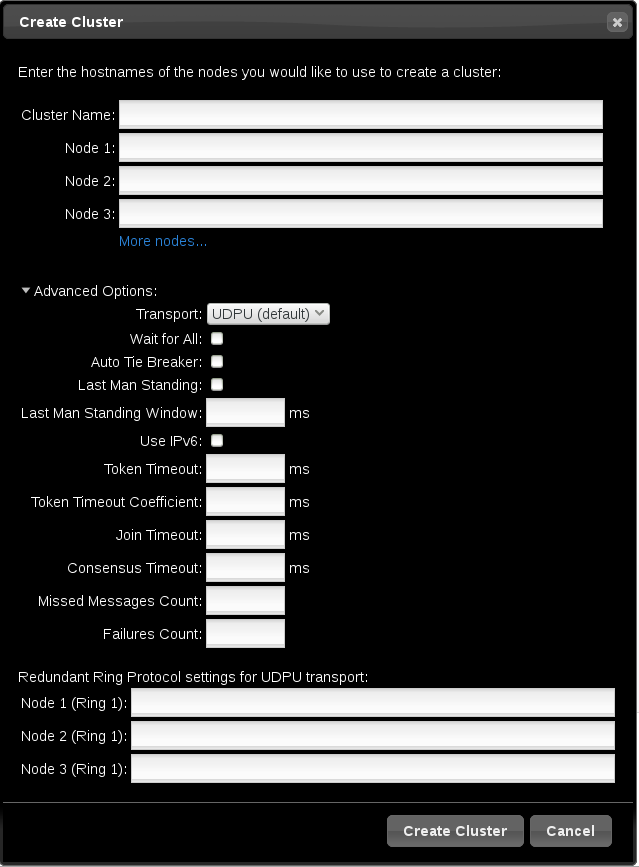
- クラスターを作成するには、Create New をクリックし、作成するクラスターとクラスターを設定するノードの名前を入力します。また、この画面では 「高度なクラスター設定オプション」 に記載されているクラスター通信のトランスポートメカニズムなどの高度なクラスターオプションを設定することもできます。クラスター情報を入力したら、 をクリックします。
- 既存のクラスターを Web UI に追加するには、Add Existing をクリックし、Web UI で管理するクラスターのノードのホスト名または IP アドレスを入力します。
ツールチップ 表示として表示できます。
2.2.1. 高度なクラスター設定オプション
図2.2 クラスターページの作成
[D]
2.2.2. クラスター管理パーミッションの設定
- Web UI を使用してクラスターを管理するためのパーミッション。ネットワーク経由でノードに接続する pcs コマンドを実行するパーミッションも付与されます。本セクションでは、Web UI でこのパーミッションを設定する方法を説明します。
- ACL を使用し、クラスター設定への読み取り専用アクセスまたは読み書きアクセスをローカルユーザーに許可するパーミッション。Web UI で ACL を設定する方法は、「ACL の設定」 を参照してください。
haclient にユーザーを追加することで、ユーザー hacluster 以外の特定のユーザーにパーミッションを付与し、Web UI でクラスターを管理し、ネットワーク経由でノードに接続する pcs コマンドを実行できます。次に、 ページの タブをクリックし、表示された画面でパーミッションを設定すると、グループ haclient の個別のメンバーにパーミッションセットを設定できます。この画面では、グループのパーミッションを設定することもできます。
- 読み取りパーミッション (クラスター設定の表示)
- 書き込みパーミッション (パーミッションおよび ACL を除くクラスター設定の変更)
- 付与パーミッション (クラスターパーミッションおよび ACL の変更)
- フルパーミッション (ノードの追加や削除などのクラスターへの無制限アクセス、およびキーや証明書へのアクセス)
2.3. クラスターコンポーネントの設定
- (で説明されている) 「クラスターノード」
- (を参照) 「クラスターリソース」
- (を参照) 「フェンスデバイス」
- (を参照) 「ACL の設定」
- (クラスタープロパティー)を参照してください。 「クラスターのプロパティー」
図2.3 クラスターコンポーネントのメニュー

[D]
2.3.1. クラスターノード
Configure Fencing を選択することで、「フェンスデバイス」 で説明されているように、このページで直接フェンスデバイスを設定することもできます。
2.3.2. クラスターリソース
2.3.3. フェンスデバイス
2.3.4. ACL の設定
ACL オプションを選択すると、ローカルユーザーのパーミッションを設定できる画面が表示され、アクセス制御リスト(ACL)を使用してクラスター設定への読み取り専用または読み書きアクセスが可能になります。
2.3.5. クラスターのプロパティー
Cluster Properties オプションを選択するとクラスタープロパティーが表示され、このプロパティーをデフォルト値から変更できます。Pacemaker クラスタープロパティーの詳細は 12章Pacemaker クラスターのプロパティー を参照してください。
2.4. 高可用性 pcsd Web UI の設定
pcsd Web UI を使用すると、クラスターのノードのいずれかに接続して、クラスター管理ページを表示できます。接続先のノードがダウンするか、使用できなくなった場合は、クラスターの別のノードを指定する URL でブラウザーを開くと、クラスターに再接続できます。ただし、pcsd Web UI 自体を高可用性向けに設定することもできます。この場合、新しい URL を入力することなく継続してクラスターを管理できます。
pcsd Web UI を設定するには、以下の手順を実行します。
/etc/sysconfig/pcsd設定ファイルでPCSD_SSL_CERT_SYNC_ENABLEDがtrueに設定されていることを確認します。これは、RHEL 7 のデフォルト値です。証明書の同期を有効にすると、pcsdはクラスター設定とノードの add コマンドのpcsd証明書を同期します。pcsdWeb UI への接続に使用するフローティング IP アドレスであるIPaddr2クラスターリソースを作成します。物理ノードに関連付けられている IP アドレスは使用できません。IPaddr2リソースの NIC デバイスが指定されていない場合は、そのノードに静的に割り当てられている IP アドレスの 1 つと同じネットワークにフローティング IP が存在している必要があります。存在していないと、Floating IP アドレスを割り当てる NIC デバイスが適切に検出されません。- pcsd で使用するカスタム SSL 証明書を作成し、
pcsd- カスタムの SSL 証明書を作成するには、ワイルドカード証明書を使用するか、SAN (Subject Alternative Name: サブジェクトの別名) 証明書の延長を使用できます。Red Hat 証明書システムに関する詳細は、Red Hat Certificate System Administration Guideを参照してください。
- pcs pcsd certkey コマンドを使用して
pcsdのカスタム証明書をインストールします。 - pcs
pcsdsync-certificates コマンドを使用して、pcsd 証明書をクラスター内のすべてのノードに同期します。
- クラスターリソースとして設定したフローティング IP アドレスを使用して、
pcsdWeb UI に接続します。
pcsd Web UI を設定しても、接続先のノードがダウンすると、再度ログインするよう求められます。
第3章 pcs コマンドラインインターフェイス
corosync.conf ファイルおよび cib.xml ファイルにインターフェイスを提供することで、corosync および Pacemaker を制御し、設定します。
pcs [-f file] [-h] [commands]...
3.1. pcs コマンド
clusterクラスターオプションおよびノードの設定を行います。pcs cluster コマンドの詳細は 4章クラスターの作成と管理 を参照してください。resourcestonithPacemaker との使用に備えてフェンスデバイスを設定します。pcs stonith コマンドの詳細は、5章フェンス機能: STONITH の設定 を参照してください。constraintリソースの制約を管理します。pcs constraint コマンドの詳細は、7章リソースの制約 を参照してください。プロパティーPacemaker のプロパティーを設定します。pcs property コマンドでプロパティーを設定する方法については 12章Pacemaker クラスターのプロパティー を参照してください。status現在のクラスターとリソースの状態を表示します。pcs status コマンドの詳細は 「状態の表示」 を参照してください。configユーザーが理解できる形式でクラスターの全設定を表示します。pcs config コマンドの詳細は 「全クラスター設定の表示」 を参照してください。
3.2. pcs の使用に関するヘルプ表示
-h オプションを使用すると pcs コマンドのパラメーターとその説明が表示されます。たとえば、以下のコマンドは pcs resource コマンドのパラメーターを表示します。出力の一部だけが表示されます。
# pcs resource -h
Usage: pcs resource [commands]...
Manage pacemaker resources
Commands:
show [resource id] [--all]
Show all currently configured resources or if a resource is specified
show the options for the configured resource. If --all is specified
resource options will be displayed
start <resource id>
Start resource specified by resource_id
...
3.3. raw クラスター設定の表示
3.4. 設定の変更をファイルに保存
-f オプションを使用して、アクティブな CIB に影響を与えずに、ファイルに設定変更を保存できます。
pcs cluster cib filename
testfile という名前のファイルに保存します。
# pcs cluster cib testfiletestfile ファイルにリソースを作成しますが、リソースを現在実行中のクラスター設定には追加しません。
# pcs -f testfile resource create VirtualIP ocf:heartbeat:IPaddr2 ip=192.168.0.120 cidr_netmask=24 op monitor interval=30stestfile の現在のコンテンツを CIB にプッシュできます。
# pcs cluster cib-push testfile3.5. 状態の表示
pcs status commands
resources、groups、cluster、nodes、または pcsd を指定すると、特定のクラスター コンポーネントのみの状態を表示します。
3.6. 全クラスター設定の表示
pcs config
3.7. 現在の pcs バージョンの表示
pcs --version
3.8. クラスター設定のバックアップおよび復元
pcs config backup filename
--local オプションを指定すると、このコマンドを実行するノードでのみクラスター設定ファイルが復元されます。ファイル名を指定しないと、標準入力が使用されます。
pcs config restore [--local] [filename]
第4章 クラスターの作成と管理
4.1. クラスターの作成
- クラスターの各ノードで pcsd を開始します。
- クラスターを設定するノードを認証します。
- クラスターノードの設定と同期を行います。
- クラスターノードでクラスターサービスを起動します。
4.1.1. pcsd デーモンの開始
pcsd サービスを起動し、システムの起動時に pcsd を有効にします。これらのコマンドはクラスターの各ノードで実行する必要があります。
#systemctl start pcsd.service#systemctl enable pcsd.service
4.1.2. クラスターノードの認証
pcs デーモンに対して pcs を認証します。
- すべてのノードで
pcs管理者のユーザー名はhaclusterである必要があります。haclusterユーザーのパスワードは、各ノードで同じにすることが推奨されます。 usernameまたはpasswordを指定しないと、コマンドの実行時にノードごとにこれらのパラメーターの入力を求められます。- ノードを指定しないと、以前に
pcscluster setup コマンドで指定したノードの pcs が認証されます。
pcs cluster auth [node] [...] [-u username] [-p password]
z1.example.com と z2.example.com の両方で設定されるクラスター内の両方のノードに対して、z1.example.com のユーザー hacluster を認証します。このコマンドは、クラスターノードのユーザー hacluster のパスワードを要求します。
root@z1 ~]# pcs cluster auth z1.example.com z2.example.com
Username: hacluster
Password:
z1.example.com: Authorized
z2.example.com: Authorized
.pcs/tokens ファイル(または /var/lib/pcsd/tokens )に保存されます。
4.1.3. クラスターノードの設定と起動
--startオプションを使用すると指定ノードでクラスターサービスが起動します。必要に応じて、別の pcs cluster start コマンドを使用してクラスターサービスを起動することもできます。pcs cluster setup --start コマンドを使用してクラスターを作成する場合、または pcs cluster start コマンドでクラスターサービスを開始する場合、クラスターが稼働するまでにわずかな遅延が生じる可能性があります。クラスターとその設定で後続のアクションを実行する前に、pcs cluster status コマンドを使用してクラスターが稼働していることを確認することが推奨されます。--localオプションを指定すると、ローカルノードでのみ変更が実行されます。
pcs cluster setup [--start] [--local] --name cluster_ name node1 [node2] [...]
--allオプションを使用するとすべてのノードでクラスターサービスを起動します。- ノードを指定しないとクラスターサービスはローカルのノードでしか起動されません。
pcs cluster start [--all] [node] [...]
4.2. クラスターのタイムアウト値の設定
表4.1 タイムアウトオプション
| オプション | 説明 |
|---|---|
--token timeout | トークンを受信しなかった後にトークンの損失が宣言されるまでの時間をミリ秒単位で設定します (デフォルトは 1000 ms です)。 |
--join timeout | join メッセージの待ち時間をミリ秒単位で設定します (デフォルトは 50 ms です)。 |
--consensus timeout | 新しいメンバーシップの設定を開始する前に合意が得られるまでの待ち時間をミリ秒単位で設定します (デフォルトは 1200 ms です)。 |
--miss_count_const count | 再送信が行われる前に、トークンの受信時に再送信のメッセージがチェックされる最大回数を設定します。デフォルトは 5 (5 つのメッセージ) です。 |
--fail_recv_const failures | 新しい設定の設定前に、受信しなければならないメッセージが発生する可能性がある場合、メッセージを受信せずにトークンをローテーションする回数を指定します (デフォルトの失敗数は 2500 です)。 |
new_cluster クラスターを作成し、トークンのタイムアウト値を 10000 ミリ秒(10 秒)に設定し、join タイムアウト値を 100 ミリ秒に設定します。
# pcs cluster setup --name new_cluster nodeA nodeB --token 10000 --join 1004.3. 冗長リングプロトコル (RRP) の設定
my_rrp_clusterM という名前のクラスターを設定します。ノード A には nodeA -0 と nodeA- 1 の 2 つのインターフェイスがあります。ノード B には、nodeB -0 と nodeB- 1 の 2 つのインターフェイスがあります。RRP を使用してこれらのノードをクラスターとして設定するには、以下のコマンドを実行します。
# pcs cluster setup --name my_rrp_cluster nodeA-0,nodeA-1 nodeB-0,nodeB-1 udp トランスポートを使用するクラスターで RRP を設定する方法は、pcs cluster setup コマンドのヘルプ画面を参照してください。
4.4. クラスターノードの管理
4.4.1. クラスターサービスの停止
--all オプションを指定すると全ノードのクラスターサービスが停止され、ノードを指定しないとローカルノードでのみクラスターサービスが停止します。
pcs cluster stop [--all] [node] [...]
pcs cluster kill
4.4.2. クラスターサービスの有効化および無効化
--allオプションを使用すると、全ノードでクラスターサービスが有効になります。- ノードを指定しないと、ローカルノードでのみクラスターサービスが有効になります。
pcs cluster enable [--all] [node] [...]
--allオプションを使用すると、全ノードのクラスターサービスが無効になります。- ノードを指定しないと、ローカルノードでのみクラスターサービスが無効になります。
pcs cluster disable [--all] [node] [...]
4.4.3. クラスターノードの追加
clusternode-01.example.com、clusternode-02.example.com、および clusternode-03.example.com です。新しいノードは newnode.example.com になります。
- クラスターパッケージをインストールします。クラスターが SBD、Booth チケットマネージャー、またはクォーラムデバイスを使用する場合、新しいノードにそれぞれのパッケージ(
sbd、ブートサイト、)も手動でインストールする必要があります。corosync-qdevice[root@newnode ~]#
yum install -y pcs fence-agents-all - firewalld デーモンを実行している場合は、以下のコマンドを実行して Red Hat High Availability Add-On で必要なポートを有効にします。
#
firewall-cmd --permanent --add-service=high-availability#firewall-cmd --add-service=high-availability - ユーザー ID
haclusterのパスワードを設定します。クラスターの各ノードで、同じパスワードを使用することが推奨されます。[root@newnode ~]#
passwd haclusterChanging password for user hacluster. New password: Retype new password: passwd: all authentication tokens updated successfully. - 以下のコマンドを実行して
pcsdサービスを開始し、システムの起動時にpcsdを有効にします。#
systemctl start pcsd.service#systemctl enable pcsd.service
- 新しいクラスターノードで
haclusterユーザーを認証します。[root@clusternode-01 ~]#
pcs cluster auth newnode.example.comUsername: hacluster Password: newnode.example.com: Authorized - 新しいノードを既存のクラスターに追加します。また、このコマンドは
corosync.confクラスター設定ファイルをクラスター内のすべてのノード(追加する新しいノードを含む)に同期します。[root@clusternode-01 ~]#
pcs cluster node add newnode.example.com
- 新しいノードで、クラスターサービスを開始して有効にします。
[root@newnode ~]#
pcs cluster startStarting Cluster... [root@newnode ~]#pcs cluster enable - 新しいクラスターノードに対して、フェンシングデバイスを設定してテストします。フェンスデバイスの設定は 5章フェンス機能: STONITH の設定 を参照してください。
4.4.4. クラスターノードの削除
corosync.conf からそのノードを削除します。クラスターに関するすべての情報をクラスターノード全体で削除し、クラスターを完全に破棄する方法については、「クラスター設定の削除」 を参照してください。
pcs cluster node remove node
4.4.5. スタンバイモード
--all を指定すると、このコマンドはすべてのノードをスタンバイモードにします。
pcs cluster standby node | --all
--all を指定すると、このコマンドはすべてのノードをスタンバイモードから外します。
pcs cluster unstandby node | --all
4.5. ユーザーのパーミッション設定
hacluster 以外の特定のユーザーに、クラスターを管理するパーミッションを付与できます。個々のユーザーに付与できるパーミッションには、以下の 2 つのセットがあります。
- 「ネットワーク上でのノードアクセスのパーミッション設定」 で説明しているように、個々のユーザーが Web UI からクラスターを管理でき、ネットワークからノードに接続できる pcs コマンドを実行可能なパーミッション。ネットワーク経由でノードに接続するコマンドには、クラスターを設定するコマンド、またはクラスターからノードを追加または削除するためのコマンドが含まれます。
- 「ACL を使用したローカルパーミッションの設定」 で説明しているように、クラスター設定への読み込み専用または書き込み専用アクセスをローカルユーザーに許可するパーミッション。ネットワーク経由で接続する必要のないコマンドには、リソースの作成や制約の設定など、クラスター設定を編集するコマンドが含まれます。
4.5.1. ネットワーク上でのノードアクセスのパーミッション設定
haclient に追加します。「クラスター管理パーミッションの設定」 で説明しているように、Web UI を使用することで、これらのユーザーにパーミッションを付与することができます。
4.5.2. ACL を使用したローカルパーミッションの設定
haclient グループのメンバーユーザーは、クラスター設定への完全なローカル読み取り/書き込みアクセスを持ちます。
- pcs acl role create... コマンドを実行して、その ロール のパーミッションを定義するロールを作成します。
- pcs acl user create コマンドで作成したロールをユーザーに割り当てます。
rouser という名前のローカルユーザーに、クラスター設定に対する読み取り専用アクセスを提供します。
- この手順では、
rouserユーザーがローカルシステムに存在し、rouserユーザーがhaclientグループのメンバーである必要があります。#
adduser rouser#usermod -a -G haclient rouser enable-aclクラスタープロパティーで Pacemaker ACL を有効にします。#
pcs property set enable-acl=true --force- cib に対して読み取り専用権限を持つ
read-onlyという名前のロールを作成します。#
pcs acl role create read-only description="Read access to cluster" read xpath /cib - pcs ACL システムで
rouserユーザーを作成し、そのユーザーに読み取り専用ロールを割り当てます。#
pcs acl user create rouser read-only - 現在の ACL を表示します。
#
pcs aclUser: rouser Roles: read-only Role: read-only Description: Read access to cluster Permission: read xpath /cib (read-only-read)
wuser という名前のローカルユーザーにクラスター設定の書き込みアクセスを提供します。
- この手順では、
wuserユーザーがローカルシステムに存在し、wuserユーザーがhaclientグループのメンバーである必要があります。#
adduser wuser#usermod -a -G haclient wuser enable-aclクラスタープロパティーで Pacemaker ACL を有効にします。#
pcs property set enable-acl=true --force- cib に対して書き込みパーミッションを持つ
write-accessという名前のロールを作成します。#
pcs acl role create write-access description="Full access" write xpath /cib - pcs ACL システムで
wuserユーザーを作成し、そのユーザーにwrite-accessロールを割り当てます。#
pcs acl user create wuser write-access - 現在の ACL を表示します。
#
pcs aclUser: rouser Roles: read-only User: wuser Roles: write-access Role: read-only Description: Read access to cluster Permission: read xpath /cib (read-only-read) Role: write-access Description: Full Access Permission: write xpath /cib (write-access-write)
4.6. クラスター設定の削除
pcs cluster destroy
4.7. クラスターの状態表示
pcs status
pcs cluster status
pcs status resources
4.8. クラスターメンテナンス
- クラスターの別のノードでサービスが継続的に実行している状態で、クラスター内のノードを停止する必要がある場合は、そのクラスターノードをスタンバイモードにすることができます。スタンバイノードのノードは、リソースをホストすることができなくなります。ノードで現在アクティブなリソースは、別のノードに移行するか、(他のノードがそのリソースを実行できない場合は) 停止します。スタンバイモードの詳細は、「スタンバイモード」 を参照してください。
- リソースを停止せずに、現在実行しているノードから個別のリソースを移行する必要がある場合は、pcs resource move コマンドを使用してリソースを別のノードに移行できます。pcs resource move コマンドの詳細は、「リソースを手作業で移動する」 を参照してください。pcs resource move コマンドを実行すると、現在実行しているノードでリソースが実行されないように、制約がリソースに追加されます。リソースを戻す準備ができたら、pcs resource clear または pcs constraint delete コマンドを実行して制約を削除できます。ただし、このコマンドを実行しても、リソースが必ずしも元のノードに戻る訳ではありません。その時点でリソースが実行できる場所は、リソースを最初に設定した方法によって異なるためです。「現在のノードからリソースを移動」 で説明しているように、pcs resource relocate run コマンドを使用すると、リソースを指定のノードに移動できます。
- 実行中のリソースを完全に停止し、クラスターが再び起動しないようにする必要がある場合は、pcs resource disable コマンドを使用できます。pcs resource disable コマンドの詳細は、「クラスターリソースの有効化、無効化、および禁止」 を参照してください。
- Pacemaker がリソースに対するアクションを実行するのを防ぐ必要がある場合(たとえば、リソースに対するメンテナンスの実行中に復元アクションを無効にする必要がある場合や、
/etc/sysconfig/pacemaker設定をリロードする必要がある場合)、「管理リソース」 の説明にあるように pcs resource unmanage コマンドを使用します。Pacemaker Remote 接続リソースは、非管理モードにしないでください。 - クラスターを、サービスが開始または停止されない状態にする必要がある場合は、
maintenance-modeクラスタープロパティーを設定できます。クラスターをメンテナンスモードにすると、すべてのリソースが自動的に非管理モードになります。クラスターのプロパティーの詳細は 表12.1「クラスターのプロパティー」 を参照してください。 - Pacemaker リモートノードでメンテナンスを実行する必要がある場合、「システムアップグレードおよび pacemaker_remote」 で説明しているように、リモートノードリソースを無効にすることで、ノードをクラスターから削除できます。
第5章 フェンス機能: STONITH の設定
5.1. STONITH (フェンス) エージェント
pcs stonith list [filter]
5.2. フェンスデバイスの一般的なプロパティー
- フェンスデバイスを無効にするには、pcs stonith disable stonith_id コマンドを実行します。これにより、ノードがそのデバイスを使用できないようにすることができます。
- 特定のノードがフェンスデバイスを使用できないようにするには、pcs constraint location ... avoids コマンドを使用して、フェンシングリソースの場所制約を設定できます。
stonith-enabled=falseを設定すると、フェンシングがすべて無効になります。ただし、実稼働環境でフェンシングを無効にすることは適していないため、フェンシングが無効になっている場合は、Red Hat ではクラスターがサポートされないことに注意してください。
表5.1 フェンスデバイスの一般的なプロパティー
| フィールド | タイプ | デフォルト | 説明 |
|---|---|---|---|
pcmk_host_map | 文字列 | ホスト名を、ホスト名に対応していないデバイスのポート番号へマッピングします。たとえば、node1:1 ;node2:2, 3 の場合は、node1 にはポート 1 を使用し、node2 にはポート 2 と 3 を使用するようにクラスターに指示します。 | |
pcmk_host_list | 文字列 | このデバイスによって制御されるマシンのリスト( pcmk_host_check=static-list以外オプション)。 | |
pcmk_host_check | 文字列 | dynamic-list | デバイスで制御するマシンを指定します。許可される値: dynamic-list (デバイスのクエリー)、static-list ( pcmk_host_list 属性の確認)、none (すべてのデバイスがすべてのマシンをフェンスできると仮定) |
5.3. デバイス固有のフェンスオプションの表示
pcs stonith describe stonith_agent
# pcs stonith describe fence_apc
Stonith options for: fence_apc
ipaddr (required): IP Address or Hostname
login (required): Login Name
passwd: Login password or passphrase
passwd_script: Script to retrieve password
cmd_prompt: Force command prompt
secure: SSH connection
port (required): Physical plug number or name of virtual machine
identity_file: Identity file for ssh
switch: Physical switch number on device
inet4_only: Forces agent to use IPv4 addresses only
inet6_only: Forces agent to use IPv6 addresses only
ipport: TCP port to use for connection with device
action (required): Fencing Action
verbose: Verbose mode
debug: Write debug information to given file
version: Display version information and exit
help: Display help and exit
separator: Separator for CSV created by operation list
power_timeout: Test X seconds for status change after ON/OFF
shell_timeout: Wait X seconds for cmd prompt after issuing command
login_timeout: Wait X seconds for cmd prompt after login
power_wait: Wait X seconds after issuing ON/OFF
delay: Wait X seconds before fencing is started
retry_on: Count of attempts to retry power on
method オプションを提供するフェンスエージェントでは cycle の値がサポートされないため、データの破損が発生する可能性があるため、この値は指定できません。
5.4. フェンスデバイスの作成
pcs stonith create stonith_id stonith_device_type [stonith_device_options]
# pcs stonith create MyStonith fence_virt pcmk_host_list=f1 op monitor interval=30s - フェンスデバイスの中には、フェンスできるノードを自動的に判断できるものがあります。
- フェンスデバイスの作成時に
pcmk_host_listパラメーターを使用すると、フェンスデバイスで制御されるすべてのマシンを指定できます。 - フェンスデバイスによっては、フェンスデバイスが理解する仕様へのホスト名のマッピングが必要となるものがあります。フェンスデバイスの作成時に、
pcmk_host_mapパラメーターを使用してホスト名をマッピングできます。
5.5. フェンスデバイスの表示
--full オプションを指定すると、設定した stonith オプションがすべて表示されます。
pcs stonith show [stonith_id] [--full]
5.6. フェンスデバイスの修正と削除
pcs stonith update stonith_id [stonith_device_options]
pcs stonith delete stonith_id
5.7. フェンスデバイスが接続されているノードの管理
--off を指定すると、stonith への off API 呼び出しが使用され、ノードを再起動する代わりにオフになります。
pcs stonith fence node [--off]
pcs stonith confirm node
5.8. その他のフェンス設定オプション
表5.2 フェンスデバイスの高度なプロパティー
| フィールド | タイプ | デフォルト | 説明 |
|---|---|---|---|
pcmk_host_argument | 文字列 | port | port の代替パラメーターです。デバイスによっては、標準の port パラメーターに対応していない場合や、そのデバイス固有のパラメーターも提供している場合があります。このパラメーターを使用して、フェンスするマシンを示すデバイス固有の代替パラメーターを指定します。クラスターが追加パラメーターを提供しないようにする場合は、none 値を使用します。 |
pcmk_reboot_action | 文字列 | reboot | 再起動 の代わりに実行する別のコマンド。標準的なコマンドに対応していないデバイスや、別のコマンドを提供しているデバイスがあります。このパラメーターを使用して、再起動を実行するデバイス固有の代替コマンドを指定します。 |
pcmk_reboot_timeout | 時間 | 60s | stonith-timeout の代わりに、再起動アクションに使用するタイムアウトを指定します。再起動が完了するまでに通常より長い時間を要するデバイスもあれば、通常より短い時間で完了するデバイスもあります。このパラメーターを使用して、再起動にデバイス固有のタイムアウトを指定します。 |
pcmk_reboot_retries | 整数 | 2 | タイムアウト期間内に、reboot コマンドを再試行する回数の上限です。複数の接続に対応していないデバイスもあります。デバイスが別のタスクでビジー状態になると操作が失敗する場合があるため、タイムアウトに達していなければ、Pacemaker が操作を自動的に再試行します。Pacemaker による再起動の動作の再試行回数を変更する場合に使用します。 |
pcmk_off_action | 文字列 | off | オフ の代わりに実行する代替コマンド。標準的なコマンドに対応していないデバイスや、別のコマンドを提供しているデバイスがあります。このような場合は、このパラメーターを使用して、オフ操作を実行するデバイス固有のコマンドを指定します。 |
pcmk_off_timeout | 時間 | 60s | stonith-timeout の代わりに、オフアクションに使用する別のタイムアウトを指定します。デバイスによって、この操作が完了するのにかかる時間が、通常と大きく異なる場合があります。このパラメーターを使用して、オフ操作にデバイス固有のタイムアウトを指定します。 |
pcmk_off_retries | 整数 | 2 | タイムアウト期間内に、off コマンドを再試行する回数の上限です。複数の接続に対応していないデバイスもあります。デバイスが別のタスクでビジー状態になると操作が失敗する場合があるため、タイムアウトに達していなければ、Pacemaker が操作を自動的に再試行します。Pacemaker によるオフ動作の再試行回数を変更する場合に使用します。 |
pcmk_list_action | 文字列 | list | list の代わりに実行する別のコマンド。標準的なコマンドに対応していないデバイスや、別のコマンドを提供しているデバイスがあります。このような場合は、このパラメーターを使用して、list 操作を実行するデバイス固有のコマンドを指定します。 |
pcmk_list_timeout | 時間 | 60s | stonith-timeout の代わりに、list 操作に使用する別のタイムアウトを指定します。デバイスによって、この操作が完了するのにかかる時間が、通常と大きく異なる場合があります。このパラメーターを使用して、list 操作にデバイス固有のタイムアウトを指定します。 |
pcmk_list_retries | 整数 | 2 | タイムアウト期間内に、list コマンドを再試行する回数の上限です。複数の接続に対応していないデバイスもあります。デバイスが別のタスクでビジー状態になると操作が失敗する場合があるため、タイムアウトに達していなければ、Pacemaker が操作を自動的に再試行します。Pacemaker による list 動作の再試行回数を変更する場合に使用します。 |
pcmk_monitor_action | 文字列 | monitor | monitor の代わりに実行する代替コマンド。標準的なコマンドに対応していないデバイスや、別のコマンドを提供しているデバイスがあります。このような場合は、このパラメーターを使用して、監視操作を実行するデバイス固有のコマンドを指定します。 |
pcmk_monitor_timeout | 時間 | 60s | stonith-timeout の代わりに、監視アクションに使用する別のタイムアウトを指定します。デバイスによって、この操作が完了するのにかかる時間が、通常と大きく異なる場合があります。このパラメーターを使用して、監視操作にデバイス固有のタイムアウトを指定します。 |
pcmk_monitor_retries | 整数 | 2 | タイムアウト期間内に、monitor コマンドを再試行する回数の上限です。複数の接続に対応していないデバイスもあります。デバイスが別のタスクでビジー状態になると操作が失敗する場合があるため、タイムアウトに達していなければ、Pacemaker が操作を自動的に再試行します。Pacemaker による監視操作の再試行回数を変更する場合に使用します。 |
pcmk_status_action | 文字列 | status | status の代わりに実行する代替コマンド。標準的なコマンドに対応していないデバイスや、別のコマンドを提供しているデバイスがあります。このような場合は、このパラメーターを使用して、status 操作を実行するデバイス固有のコマンドを指定します。 |
pcmk_status_timeout | 時間 | 60s | stonith-timeout の代わりに、ステータス動作に使用する別のタイムアウトを指定します。デバイスによって、この操作が完了するのにかかる時間が、通常と大きく異なる場合があります。このパラメーターを使用して、status 操作にデバイス固有のタイムアウトを指定します。 |
pcmk_status_retries | 整数 | 2 | タイムアウト期間内に、status コマンドを再試行する回数の上限です。複数の接続に対応していないデバイスもあります。デバイスが別のタスクでビジー状態になると操作が失敗する場合があるため、タイムアウトに達していなければ、Pacemaker が操作を自動的に再試行します。Pacemaker による status 動作の再試行回数を変更する場合に使用します。 |
pcmk_delay_base | 時間 | 0s |
stonith 操作のベース遅延を有効にし、ベース遅延の値を指定します。ノードの数が偶数になるクラスターでは、遅延を設定すると、均等の分割時に同時にノードが互いにフェンシングするのを回避できます。ランダムな遅延は、すべてのノードに同じフェンスデバイスが使用されている場合に役に立つことがあります。また、静的遅延を変更すると、各ノードで異なるデバイスが使用される場合に各フェンシングデバイスで役に立つことがあります。全体の遅延は、合計が最大遅延を下回るように、ランダムな遅延値に静的遅延を加算します。
pcmk_delay_base を設定し、pcmk_delay_max を設定しない場合は、遅延にランダムなコンポーネントがなく、pcmk_delay_base の値になります。
個々のフェンスエージェントには delay パラメーターが実装されています。これは、
pcmk_delay_* プロパティーで設定された遅延とは依存しません。この遅延の両方が設定されている場合は、その両方が一緒に追加されるため、通常は併用されません。
|
pcmk_delay_max | 時間 | 0s |
stonith 動作のランダムな遅延を有効にし、ランダムな遅延の最大値を指定します。ノードの数が偶数になるクラスターでは、遅延を設定すると、均等の分割時に同時にノードが互いにフェンシングするのを回避できます。ランダムな遅延は、すべてのノードに同じフェンスデバイスが使用されている場合に役に立つことがあります。また、静的遅延を変更すると、各ノードで異なるデバイスが使用される場合に各フェンシングデバイスで役に立つことがあります。全体の遅延は、合計が最大遅延を下回るように、このランダムな遅延値に静的遅延を加算します。
pcmk_delay_max を設定し、pcmk_delay_base を設定しない場合は、静的コンポーネントが遅延に含まれません。
個々のフェンスエージェントには delay パラメーターが実装されています。これは、
pcmk_delay_* プロパティーで設定された遅延とは依存しません。この遅延の両方が設定されている場合は、その両方が一緒に追加されるため、通常は併用されません。
|
pcmk_action_limit | 整数 | 1 | このデバイスで並行して実行できる操作の上限です。最初に、クラスタープロパティーの concurrent-fencing=true を設定する必要があります。値を -1 にすると無制限になります。 |
pcmk_on_action | 文字列 | on | 高度な使用のみ: on の代わりに実行する代替コマンド。標準的なコマンドに対応していないデバイスや、別のコマンドを提供しているデバイスがあります。このパラメーターを使用して、on アクションを実装するデバイス固有のコマンドを指定します。 |
pcmk_on_timeout | 時間 | 60s | 高度な使用のみ: stonith-timeout の代わりに、on 操作に使用する別のタイムアウトを指定します。デバイスによって、この操作が完了するのにかかる時間が、通常と大きく異なる場合があります。このパラメーターを使用して、on 操作にデバイス固有のタイムアウトを指定します。 |
pcmk_on_retries | 整数 | 2 | 高度な使用のみ:タイムアウト期間内に、on コマンドを再試行する最大回数。複数の接続に対応していないデバイスもあります。デバイスが別のタスクでビジー状態になると操作が失敗する場合があるため、タイムアウトに達していなければ、Pacemaker が操作を自動的に再試行します。Pacemaker による on 動作の再試行回数を変更する場合に使用します。 |
fence-reaction クラスタープロパティーを設定すると、クラスターノードが独自のフェンシングの通知を受信した場合にどのように反応するかを決定できます。クラスターノードは、フェンシングの設定が間違っている場合に独自のフェンシングの通知を受信するか、ファブリックフェンシングがクラスター通信を遮断しない状態である可能性があります。このプロパティーのデフォルト値は stop (Pacemaker をすぐに停止して停止し続ける)ですが、この値に最も安全な選択肢は panic で、ローカルノードをすぐに再起動しようとします。停止動作を希望する場合は、おそらくファブリックフェンシングと併用する場合は、明示的に指定することが推奨されます。
5.9. フェンスレベルの設定
- レベルは、1 から昇順で試行されていきます。
- デバイスに障害が発生すると、現在のレベルの処理が終了します。同レベルのデバイスには試行されず、次のレベルが試行されます。
- すべてのデバイスのフェンシングが正常に完了すると、そのレベルが継承され、他のレベルは試行されなくなります。
- いずれかのレベルで成功するか、すべてのレベルが試行され失敗すると、操作は終了します。
pcs stonith level add level node devices
pcs stonith level
rh7- 2 にフェンスデバイスが my_ilo と呼ばれる ilo フェンスデバイスと、my_apc という apc フェンスデバイスが設定されています。このコマンドはフェンスレベルを設定し、デバイス my_ilo に障害が発生し、ノードがフェンスできない場合に、Pacemaker がデバイス my_apc の使用を試みるようにします。この例では、レベル設定後の pcs stonith level コマンドの出力も示しています。
#pcs stonith level add 1 rh7-2 my_ilo#pcs stonith level add 2 rh7-2 my_apc#pcs stonith levelNode: rh7-2 Level 1 - my_ilo Level 2 - my_apc
pcs stonith level remove level [node_id] [stonith_id] ... [stonith_id]
pcs stonith level clear [node|stonith_id(s)]
# pcs stonith level clear dev_a,dev_bpcs stonith level verify
node1、node2、およびnode3 を、フェンスデバイス apc1 およびapc2 を使用するように、ノードnode4、node5、およびnode6 を設定して、フェンスデバイス apc3 およびapc4 を使用します。
pcs stonith level add 1 "regexp%node[1-3]" apc1,apc2 pcs stonith level add 1 "regexp%node[4-6]" apc3,apc4
pcs node attribute node1 rack=1 pcs node attribute node2 rack=1 pcs node attribute node3 rack=1 pcs node attribute node4 rack=2 pcs node attribute node5 rack=2 pcs node attribute node6 rack=2 pcs stonith level add 1 attrib%rack=1 apc1,apc2 pcs stonith level add 1 attrib%rack=2 apc3,apc4
5.10. 冗長電源のフェンシング設定
#pcs stonith create apc1 fence_apc_snmp ipaddr=apc1.example.com login=user passwd='7a4D#1j!pz864' pcmk_host_map="node1.example.com:1;node2.example.com:2"#pcs stonith create apc2 fence_apc_snmp ipaddr=apc2.example.com login=user passwd='7a4D#1j!pz864' pcmk_host_map="node1.example.com:1;node2.example.com:2"#pcs stonith level add 1 node1.example.com apc1,apc2#pcs stonith level add 1 node2.example.com apc1,apc2
5.11. 統合フェンスデバイスで使用する ACPI の設定
- ACPI Soft-Off を無効にする場合は、BIOS 設定を instant-off、またはこれに類似する設定に変更することが推奨されます。これにより、「BIOS で ACPI Soft-Off を無効化」 で説明しているように、ノードは遅延なくオフになります。
- 「logind.conf ファイルで ACPI Soft-Off の無効化」 の説明に従って、
HandlePowerKey=ignoreを/etc/systemd/logind.confファイルに設定し、ノードがフェンシングされるとすぐにオフになることを確認します。これが、ACPI Soft-Off を無効にする 1 つ目の代替方法です。 acpi=offで説明されているように、カーネル起動コマンドラインに 「GRUB 2 ファイルでの ACPI の完全な無効化」 を追加します。これは、ACPI Soft-Off を無効にする 2 つ目の代替方法です。この方法の使用が推奨される場合、または 1 つ目の代替方法が利用できない場合に使用してください。重要この方法は、ACPI を完全に無効にします。コンピューターの中には、ACPI が完全が無効になってるとシステムが正しく起動しないものもあります。お使いのクラスターに適した方法が他にない場合に 限り、この方法を使用してください。
5.11.1. BIOS で ACPI Soft-Off を無効化
- ノードを再起動して、BIOS CMOS セットアップユーティリティー プログラムを起動します。
- 管理メニュー)に移動します。
- メニューで、 (またはそれと同等の機能)を に設定します(または、遅延なく電源ボタンでノードをオフにする同等の設定)。例5.1「BIOS CMOS セットアップユーティリティー: を に設定します。」 が に設定された メニューを表示します。注記に相当するものは、コンピューターごとに異なる場合があります。ただし、この手順の目的は、電源ボタンを使用して遅延なしにコンピューターをオフにするように BIOS を設定することです。
- BIOS CMOS セットアップユーティリティー プログラムを終了し、BIOS 設定を保存します。
- ノードがフェンシングされるとすぐにオフになることを確認します。フェンスデバイスのテストの詳細は 「フェンスデバイスのテスト」 を参照してください。
例5.1 BIOS CMOS セットアップユーティリティー: を に設定します。
+---------------------------------------------|-------------------+ | ACPI Function [Enabled] | Item Help | | ACPI Suspend Type [S1(POS)] |-------------------| | x Run VGABIOS if S3 Resume Auto | Menu Level * | | Suspend Mode [Disabled] | | | HDD Power Down [Disabled] | | | Soft-Off by PWR-BTTN [Instant-Off | | | CPU THRM-Throttling [50.0%] | | | Wake-Up by PCI card [Enabled] | | | Power On by Ring [Enabled] | | | Wake Up On LAN [Enabled] | | | x USB KB Wake-Up From S3 Disabled | | | Resume by Alarm [Disabled] | | | x Date(of Month) Alarm 0 | | | x Time(hh:mm:ss) Alarm 0 : 0 : | | | POWER ON Function [BUTTON ONLY | | | x KB Power ON Password Enter | | | x Hot Key Power ON Ctrl-F1 | | | | | | | | +---------------------------------------------|-------------------+
5.11.2. logind.conf ファイルで ACPI Soft-Off の無効化
/etc/systemd/logind.conf ファイルで電源キーの処理を無効にするには、以下の手順を行います。
/etc/systemd/logind.confファイルで以下の設定を定義します。HandlePowerKey=ignore
systemd設定をリロードします。#
systemctl daemon-reload- ノードがフェンシングされるとすぐにオフになることを確認します。フェンスデバイスのテストの詳細は 「フェンスデバイスのテスト」 を参照してください。
5.11.3. GRUB 2 ファイルでの ACPI の完全な無効化
acpi=off を追加すると、ACPI Soft-Off を無効にできます。
- 以下のように
--argsオプションを grubby ツールの--update-kernelオプションと組み合わせて使用し、各クラスターノードのgrub.cfgファイルを変更します。#
grubby --args=acpi=off --update-kernel=ALLGRUB 2 の概要は、 システム管理者のガイド のGRUB 2 での作業を参照してください。 - ノードを再起動します。
- ノードがフェンシングされるとすぐにオフになることを確認します。フェンスデバイスのテストの詳細は 「フェンスデバイスのテスト」 を参照してください。
5.12. フェンスデバイスのテスト
- デバイスへの接続に使用する ssh、telnet、HTTP などのリモートプロトコルを使用して、手動でログインしてフェンスデバイスをテストしたり、出力される内容を確認します。たとえば、IPMI 対応デバイスのフェンシングを設定する場合は、ipmitool を使用してリモートでログインしてみてください。手動でログインする際に使用するオプションに注意してください。これらのオプションは、フェンスエージェントを使用する際に必要になる場合があります。フェンスデバイスにログインできない場合は、そのデバイスが ping 可能であること、ファイアウォール設定フェンスデバイスへのアクセスを妨げていないこと、フェンスエージェントでリモートアクセスが有効になっていること、認証情報が正しいことなどを確認します。
- フェンスエージェントスクリプトを使用して、フェンスエージェントを手動で実行します。フェンスエージェントを実行するのに、クラスターサービスが実行している必要はないため、デバイスをクラスターに設定する前にこのステップを完了できます。これにより、先に進む前に、フェンスデバイスが適切に応答することを確認できます。注記本セクションの例では、iLO デバイスの fence_ilo フェンスエージェントスクリプトを使用します。実際に使用するフェンスエージェントと、そのエージェントを呼び出すコマンドは、お使いのサーバーハードウェアによって異なります。指定するオプションを確認するには、フェンスエージェントの man ページを参照してください。通常は、フェンスデバイスのログイン、パスワードなどの情報と、その他のフェンスデバイスに関する情報を把握しておく必要があります。以下の例は、
-o statusパラメーターを指定して fence_ilo フェンスエージェントスクリプトを実行する場合に使用する形式になります。ノードの再起動を試行する前にデバイスをテストして、動作させることができます。このコマンドを実行する際に、iLO デバイスの電源をオン/オフにするパーミッションを持つ iLO ユーザーの名前およびパスワードを指定します。#
fence_ilo -a ipaddress -l username -p password -o status以下の例は、-o rebootパラメーターを指定して fence_ilo フェンスエージェントスクリプトを実行するために使用する形式になります。このコマンドをノードで実行すると、フェンスエージェントを設定した別のノードが再起動します。#
fence_ilo -a ipaddress -l username -p password -o rebootフェンスエージェントがステータス、オフ、オン、または再起動の動作を適切に実行しない場合は、ハードウェア、フェンスデバイスの設定、およびコマンドの構文を確認する必要があります。さらに、デバッグ出力を有効にした状態で、フェンスエージェントスクリプトを実行できます。デバッグ出力は、一部のフェンスエージェントで、フェンスデバイスにログインする際に、フェンスエージェントスクリプトに問題が発生しているイベントシーケンスの場所を確認するのに役に立ちます。#
fence_ilo -a ipaddress -l username -p password -o status -D /tmp/$(hostname)-fence_agent.debug発生した障害を診断する際に、フェンスデバイスに手動でログインする際に指定したオプションが、フェンスエージェントスクリプトでフェンスエージェントに渡した内容と同一であることを確認する必要があります。フェンスエージェントが暗号化された接続をサポートする場合は、証明書の検証の失敗によりエラーが表示され、ホストを信頼するか、フェンスエージェントのssl-insecureパラメーターを使用する必要があります。同様に、ターゲットデバイスで SSL/TLS を無効にした場合は、フェンスエージェントに SSL パラメーターを設定する際に、これを考慮しないといけない場合があります。注記テスト中のフェンスエージェントが fence_drac、fence_ilo、またはその他のシステム管理デバイスのフェンスエージェントで、引き続き失敗する場合は、フォールバックして fence_ipmilan を試行します。ほとんどのシステム管理カードは IPMI リモートログインに対応しており、フェンシングエージェントとしては fence_ipmilan だけに対応しています。 - フェンスデバイスを、手動で機能したオプションと同じオプションでクラスターに設定し、クラスターが起動したら、以下の例のように、任意のノードから pcs stonith fence コマンドを使用してフェンシングをテストします(または異なるノードから複数回実行します)。pcs stonith fence コマンドは、CIB からクラスター設定を読み取り、フェンスアクションを実行するように設定されたときにフェンスエージェントを呼び出します。これにより、クラスター設定が正確であることが確認できます。
#
pcs stonith fence node_namepcs stonith fence コマンドが正しく機能した場合、フェンスイベントの発生時にクラスターのフェンシング設定が機能します。このコマンドが失敗すると、クラスター管理が取得した設定でフェンスデバイスを起動することができません。以下の問題を確認し、必要に応じてクラスター設定を更新します。- フェンス設定を確認します。たとえば、ホストマップを使用したことがある場合は、指定したホスト名を使用して、システムがノードを見つけられるようにする必要があります。
- デバイスのパスワードおよびユーザー名に、bash シェルが誤って解釈する可能性がある特殊文字が含まれるかどうかを確認します。パスワードとユーザー名を引用符で囲んで入力すると、この問題に対処できます。
- pcs stonith コマンドで IP アドレスまたはホスト名を使用してデバイスに接続できるかどうかを確認します。たとえば、stonith コマンドでホスト名を指定し、IP アドレスを使用して行ったテストは有効ではありません。
- お使いのフェンスデバイスが使用するプロトコルにアクセスできる場合は、そのプロトコルを使用してデバイスへの接続を試行します。たとえば、多くのエージェントが ssh または telnet を使用します。デバイスへの接続は、デバイスの設定時に指定した認証情報を使用して試行する必要があります。これにより、有効なプロンプトを取得し、そのデバイスにログインできるかどうかを確認できます。
すべてのパラメーターが適切であることが確認できたものの、フェンスデバイスには接続できない時に、フェンスデバイスでログ機能が使用できる場合は、ログを確認できます。これにより、ユーザーが接続したかどうかと、ユーザーが実行したコマンドが表示されます。また、/var/log/messagesファイルで stonith やエラーを検索することもできます。これにより、転送しているものの、エージェントによっては追加情報が提供される場合があります。 - フェンスデバイステストに成功し、クラスターが稼働したら、実際の障害をテストします。このテストでは、クラスターで、トークンの損失を生じさせる動作を実行します。
- ネットワークを停止します。ネットワークの利用方法は、設定により異なります。ただし、多くの場合は、ネットワークケーブルまたは電源ケーブルをホストから物理的に抜くことができます。注記ネットワークや電源ケーブルを物理的に切断せずに、ローカルホストのネットワークインターフェイスを無効にすることは、フェンシングのテストとしては推奨されません。実際に発生する障害を正確にシミュレートしていないためです。
- ローカルのファイアウォールを使用して、corosync の受信トラフィックおよび送信トラフィックをブロックします。以下の例では corosync をブロックします。ここでは、デフォルトの corosync ポートが使用され、
firewalldがローカルファイアウォールとして使用し、corosync が使用するネットワークインターフェイスがデフォルトのファイアウォールゾーンにあることを前提とします。#
firewall-cmd --direct --add-rule ipv4 filter OUTPUT 2 -p udp --dport=5405 -j DROP#firewall-cmd --add-rich-rule='rule family="ipv4" port port="5405" protocol="udp" drop' - クラッシュをシミュレートし、マシンを
sysrq-triggerでパニックにします。ただし、カーネルパニックを発生させると、データが損失する可能性があることに注意してください。クラッシュする前に、クラスターリソースを無効にすることが推奨されます。#
echo c > /proc/sysrq-trigger
第6章 クラスターリソースの設定
6.1. リソースの作成
pcs resource create resource_id [standard:[provider:]]type [resource_options] [op operation_action operation_options [operation_action operation options]...] [meta meta_options...] [clone [clone_options] | master [master_options] | --group group_name [--before resource_id | --after resource_id] | [bundle bundle_id] [--disabled] [--wait[=n]]
--group オプションを指定すると、名前付きのリソースグループにリソースが追加されます。グループが存在しない場合は作成され、そのグループにリソースが追加されます。リソースグループの詳細は 「リソースグループ」 を参照してください。
--before および --after オプションは、リソースグループに含まれるリソースを基準にして、追加するリソースの位置を指定します。
--disabled オプションは、リソースが自動的に起動しないことを示しています。
ocf、プロバイダー heartbeat、およびタイプ IPaddr2 という名前の VirtualIP という名前のリソースを作成します。このリソースのフローティングアドレスは 192.168.0.120 で、システムはリソースが 30 秒毎に実行されるかどうかをチェックします。
# pcs resource create VirtualIP ocf:heartbeat:IPaddr2 ip=192.168.0.120 cidr_netmask=24 op monitor interval=30socf の標準および ハートビート のプロバイダーに設定されます。
# pcs resource create VirtualIP IPaddr2 ip=192.168.0.120 cidr_netmask=24 op monitor interval=30spcs resource delete resource_id
VirtualIPの既存のリソースを削除します。
# pcs resource delete VirtualIP- pcs resource create コマンドのフィールド resource_id、standard、provider、および type フィールドの詳細は、「リソースのプロパティー」 を参照してください。
- リソースごとにパラメーターを指定する方法は 「リソース固有のパラメーター」 を参照してください。
- リソースの動作をクラスターが決定する場合に使用するリソースのメタオプションを定義する方法は 「リソースのメタオプション」 を参照してください。
- リソースで行う動作を定義する方法は 「リソースの動作」 を参照してください。
cloneオプションを指定すると、クローンリソースが作成されます。masterオプションを指定すると、クローンリソースが作成されます。リソースのクローンや、複数モードのリソースに関する詳細は 9章高度な設定 を参照してください。
6.2. リソースのプロパティー
表6.1 リソースのプロパティー
表6.2 リソースプロパティーを表示させるコマンド
| pcs 表示コマンド | 出力 |
|---|---|
| pcs resource list | 利用できる全リソースのリストを表示 |
| pcs resource standards | 利用できるリソースエージェントの標準を表示 |
| pcs resource providers | 利用できるリソースエージェントのプロバイダーを表示 |
| pcs resource list string | 利用できるリソースを指定文字列でフィルターしたリストを表示。仕様名、プロバイダー名、タイプ名などでフィルターを指定して、リソースを表示できます。 |
6.3. リソース固有のパラメーター
# pcs resource describe standard:provider:type|typeLVM のリソースに設定できるパラメーターを表示します。
# pcs resource describe LVM
Resource options for: LVM
volgrpname (required): The name of volume group.
exclusive: If set, the volume group will be activated exclusively.
partial_activation: If set, the volume group will be activated even
only partial of the physical volumes available. It helps to set to
true, when you are using mirroring logical volumes.
6.4. リソースのメタオプション
表6.3 リソースのメタオプション
| フィールド | デフォルト | 説明 |
|---|---|---|
priority
| 0
| |
target-role
| Started
|
クラスターが維持するリソースのステータスです。使用できる値は以下のようになります。
* Stopped - リソースの強制停止
* Started - リソースの起動を許可 (多状態リソースの場合マスターには昇格されません)
|
is-managed
| true
| |
resource-stickiness
|
0
| |
requires
|
Calculated
|
リソースを起動できる条件を示します。
以下の条件を除き、デフォルトでは
フェンシング に設定されます。以下の値が使用できます。
*
nothing - クラスターは常にリソースを起動できます。
*
quorum - クラスターは、設定されているノードの過半数がアクティブな場合にのみこのリソースを起動できます。stonith-enabled が false の場合、またはリソースの standard が stonith の場合は、この値になります。
*
fencing -設定されているノードの過半数がアクティブで 障害が発生しているノードや不明なノードの電源がすべてオフになっている場合にのみ、クラスターはこのリソースを起動できます。
|
migration-threshold
| INFINITY
|
指定したリソースが任意のノードで失敗した回数です。この回数を超えると、そのノードには、このリソースのホストとして不適格とするマークが付けられます。値 0 は、この機能が無効になっていることを示します(ノードは不適格としてマークされません)。一方、クラスターは
INFINITY (デフォルト)が非常に大きいものの、有限数として扱います。このオプションは、失敗した操作に on-fail=restart (デフォルト)があり、クラスタープロパティー start-failure-is-fatal が false の場合にのみ有効になります。migration-threshold オプションの設定の詳細は、「障害発生によるリソースの移動」 を参照してください。start-failure-is-fatal オプションの詳細は、表12.1「クラスターのプロパティー」 を参照してください。
|
failure-timeout
| 0 (無効)
| migration-threshold オプションと併用すると、障害が発生しなかったかのように動作し、障害が発生したノードにリソースを戻せるまで待機する秒数を示します。時間ベースのアクションと同様に、cluster-recheck-interval クラスターパラメーターの値よりも頻繁にチェックされる保証はありません。failure-timeout オプションの詳細は、「障害発生によるリソースの移動」 を参照してください。
|
multiple-active
| stop_start
|
リソースが複数のノードでアクティブであることが検出された場合に、クラスターが実行する動作です。使用できる値は以下のようになります。
*
block - リソースを unmanaged としてマークします。
*
stop_only - アクティブなインスタンスをすべて停止してそのままにします。
*
stop_start - すべてのアクティブなインスタンスを停止し、1 つの場所のみでリソースを起動します。
|
pcs resource defaults options
resource-stickiness のデフォルト値を 100 にリセットします。
# pcs resource defaults resource-stickiness=100resource-stickiness のデフォルト値を 100 にリセットした後のこのコマンドの出力を示しています。
# pcs resource defaults
resource-stickiness:100
pcs resource create コマンドの形式です。
pcs resource create resource_id standard:provider:type|type [resource options] [meta meta_options...]
resource-stickiness の値を 50 にしてリソースを作成します。
# pcs resource create VirtualIP ocf:heartbeat:IPaddr2 ip=192.168.0.120 cidr_netmask=24 meta resource-stickiness=50pcs resource meta resource_id | group_id | clone_id | master_id meta_options
dummy_resource という名前の既存のリソースがあります。このコマンドは、failure-timeout メタオプションを 20 秒に設定し、同じノードで 20 秒で再起動を試行できるようにします。
# pcs resource meta dummy_resource failure-timeout=20s failure-timeout=20s が設定されているか確認するためにリソースの値を表示できます。
# pcs resource show dummy_resource
Resource: dummy_resource (class=ocf provider=heartbeat type=Dummy)
Meta Attrs: failure-timeout=20s
Operations: start interval=0s timeout=20 (dummy_resource-start-timeout-20)
stop interval=0s timeout=20 (dummy_resource-stop-timeout-20)
monitor interval=10 timeout=20 (dummy_resource-monitor-interval-10)
6.5. リソースグループ
pcs resource group add group_name resource_id [resource_id] ... [resource_id] [--before resource_id | --after resource_id]
--before オプションおよび --after オプションを使用して、追加するリソースの位置を、そのグループにすでに含まれるリソースを基準にして指定できます。
pcs resource create resource_id standard:provider:type|type [resource_options] [op operation_action operation_options] --group group_name
pcs resource group remove group_name resource_id...
pcs resource group list
IPaddr と Email が含まれるリソースグループ shortcut を作成します。
# pcs resource group add shortcut IPaddr Email- リソースは、指定した順序で起動します(この例では、最初に
IPaddr、次にEmail)。 - リソースは、指定した順序と逆の順序で停止します。(
電子メールを最初に、次にIPaddr)。
IPaddrを実行できない場合は、電子メールはできません。Emailを実行できなくても、IPaddrには影響を及ぼしません。
6.5.1. グループオプション
priority、target-role、is-managed オプションを継承します。リソースオプションの詳細は、表6.3「リソースのメタオプション」 を参照してください。
6.5.2. グループの Stickiness (粘着性)
resource-stickiness が 100 で、グループに 7 つのメンバーがあり、そのうちの 5 つがアクティブな場合、グループ全体でスコアが 500 の現在の場所が優先されます。
6.6. リソースの動作
表6.4 動作のプロパティー
6.6.1. リソース操作の設定
pcs resource create resource_id standard:provider:type|type [resource_options] [op operation_action operation_options [operation_type operation_options]...]
IPaddr2 リソースを作成します。新しいリソースは、eth2 で IP アドレス 192.168.0.99、ネットマスクが 24 の VirtualIP と呼ばれます。監視操作は、30 秒ごとに実施されます。
# pcs resource create VirtualIP ocf:heartbeat:IPaddr2 ip=192.168.0.99 cidr_netmask=24 nic=eth2 op monitor interval=30spcs resource op add resource_id operation_action [operation_properties]
pcs resource op remove resource_id operation_name operation_properties
VirtualIP を作成できます。
# pcs resource create VirtualIP ocf:heartbeat:IPaddr2 ip=192.168.0.99 cidr_netmask=24 nic=eth2
Operations: start interval=0s timeout=20s (VirtualIP-start-timeout-20s)
stop interval=0s timeout=20s (VirtualIP-stop-timeout-20s)
monitor interval=10s timeout=20s (VirtualIP-monitor-interval-10s)
#pcs resource update VirtualIP op stop interval=0s timeout=40s#pcs resource show VirtualIPResource: VirtualIP (class=ocf provider=heartbeat type=IPaddr2) Attributes: ip=192.168.0.99 cidr_netmask=24 nic=eth2 Operations: start interval=0s timeout=20s (VirtualIP-start-timeout-20s) monitor interval=10s timeout=20s (VirtualIP-monitor-interval-10s) stop interval=0s timeout=40s (VirtualIP-name-stop-interval-0s-timeout-40s)
6.6.2. グローバルリソース操作のデフォルトの設定
pcs resource op defaults [options]
timeout 値のグローバルデフォルトを 240 秒に設定します。
# pcs resource op defaults timeout=240sタイムアウト 値 240 秒で設定されたクラスターのデフォルトの監視操作値を表示します。
# pcs resource op defaults
timeout: 240s
timeout オプションを定義します。グローバル操作のタイムアウト値を有効にするには、timeout オプションを明示的に指定せずにクラスターリソースを作成するか、以下のコマンドのように、クラスターリソースを更新して timeout オプションを削除する必要があります。
# pcs resource update VirtualIP op monitor interval=10sタイムアウト 値を 240 秒に設定し、クラスターリソース VirtualIP を更新して monitor 操作のタイムアウト値を削除すると、リソース VirtualIP には、start、stop、および monitor の操作のタイムアウト値がそれぞれ 20s、40s、および 240s になります。タイムアウト操作のグローバルデフォルト値は、ここでは monitor 操作にのみ適用されます。ここでは、前のコマンドでデフォルトの timeout オプションが削除されました。
# pcs resource show VirtualIP
Resource: VirtualIP (class=ocf provider=heartbeat type=IPaddr2)
Attributes: ip=192.168.0.99 cidr_netmask=24 nic=eth2
Operations: start interval=0s timeout=20s (VirtualIP-start-timeout-20s)
monitor interval=10s (VirtualIP-monitor-interval-10s)
stop interval=0s timeout=40s (VirtualIP-name-stop-interval-0s-timeout-40s)
6.7. 設定されているリソースの表示
pcs resource show
VirtualIP という名前のリソースと WebSite という名前のリソースで設定されていると、pcs resource show コマンドを実行すると以下の出力が得られます。
# pcs resource show
VirtualIP (ocf::heartbeat:IPaddr2): Started
WebSite (ocf::heartbeat:apache): Started
pcs resource show resource_id
VirtualIP 用にパラメーターを表示します。
# pcs resource show VirtualIP
Resource: VirtualIP (type=IPaddr2 class=ocf provider=heartbeat)
Attributes: ip=192.168.0.120 cidr_netmask=24
Operations: monitor interval=30s
6.8. リソースパラメーターの変更
pcs resource update resource_id [resource_options]
VirtualIP リソースに設定したパラメーターの初期値、ip パラメーターの値を変更するコマンド、update コマンドの後の値を示しています。
#pcs resource show VirtualIPResource: VirtualIP (type=IPaddr2 class=ocf provider=heartbeat) Attributes: ip=192.168.0.120 cidr_netmask=24 Operations: monitor interval=30s #pcs resource update VirtualIP ip=192.169.0.120#pcs resource show VirtualIPResource: VirtualIP (type=IPaddr2 class=ocf provider=heartbeat) Attributes: ip=192.169.0.120 cidr_netmask=24 Operations: monitor interval=30s
6.9. 複数のモニタリング動作
OCF_CHECK_LEVEL=n オプションを追加します。
IPaddr2 リソースを設定すると、デフォルトで 10 秒間隔でタイムアウト値が 20 秒の監視操作が作成されます。
# pcs resource create VirtualIP ocf:heartbeat:IPaddr2 ip=192.168.0.99 cidr_netmask=24 nic=eth2
# pcs resource op add VirtualIP monitor interval=60s OCF_CHECK_LEVEL=106.10. クラスターリソースの有効化と無効化
resource_id で指定されるリソースを有効にします。
pcs resource enable resource_idresource_id で指定されるリソースを無効にします。
pcs resource disable resource_id6.11. クラスターリソースのクリーンアップ
failcount をリセットし、リソースの操作履歴を取得し、現在の状態を再検出するようにクラスターに指示します。
pcs resource cleanup resource_id
failcountをリセットします。
pcs resource refresh
pcs resource refresh --full
第7章 リソースの制約
場所の制約 - リソースを実行できるノードを指定する場所の制約です。場所の制約については 「場所の制約」 で説明しています。順序の制約:順序制約により、リソースが実行される順序が決まります。順序の制約については 「順序の制約」 で説明しています。コロケーションの制約 - 他のリソースに対して相対的にリソースの配置先を決定します。コロケーションの制約については 「リソースのコロケーション」 で説明しています。
7.1. 場所の制約
resource-stickiness 値の影響を受けます。これは、リソースが現在実行しているノードに留まることをどの程度優先するかを決定します。resource-stickiness 値の設定に関する詳細は、「現在のノードを優先させるリソースの設定」 を参照してください。
7.1.1. 基本的な場所の制約
score 値を使用して、制約の相対的な優先度を指定できます。
pcs constraint location rsc prefers node[=score] [node[=score]] ...
pcs constraint location rsc avoids node[=score] [node[=score]] ...
表7.1 簡単な場所の制約オプション
| フィールド | 説明 |
|---|---|
rsc
|
リソース名
|
node
|
ノード名
|
score
|
リソースを特定ノードで優先的に実行するか、または実行を回避するかを示す正の整数値。
INFINITY は、リソースの場所制約のデフォルトの スコア 値です。
pcs contraint location rsc prefers コマンドで score の値の INFINITY を指定すると、そのノードが利用可能な場合は、リソースがそのノードで優先的に実行します。ただし、そのノードが利用できない場合に、別のノードでそのリソースを実行しないようにする訳ではありません。
pcs contraint location rsc avoids コマンドの score に INFINITY を指定すると、他のノードが利用できない場合でも、そのリソースはそのノードでは実行されないことを示します。これは、-INFINITY のスコアで pcs constraint location add コマンドを設定するのと同じです。
|
Webserver リソースが node1 ノードを優先するように指定する場所の制約を作成します。
# pcs constraint location Webserver prefers node1dummy0 から dummy9 までのリソースが node1 を優先するように指定する場所の制約を作成します。
# pcs constraint location 'regexp%dummy[0-9]' prefers node1
# pcs constraint location 'regexp%dummy[[:digit:]]' prefers node17.1.2. 高度な場所の制約
resource-discovery オプションを使用して、指定したリソースに対して Pacemaker がこのノードでリソース検出を実行するかどうかの優先順位を指定できます。物理的にリソースが稼働可能なノードのサブセットでリソース検出を制限すると、ノードが大量に存在する場合にパフォーマンスを大幅に改善できます。pacemaker_remote を使用してノード数を数百のノード数に拡張する場合は、このオプションを考慮する必要があります。
resource-discovery オプションを指定するための形式を示しています。id は制約 id であることに注意してください。rsc、node、score の意味は 表7.1「簡単な場所の制約オプション」 で説明しています。このコマンドでは、基本的な場所の制約に対応します。score を正の値にすると、リソースが特定のノードで優先的に実行するように設定されます。score を負の値にすると、リソースがノードを回避するように設定されます。基本的な場所の制約と同様に、制約にリソースの正規表現を使用することもできます。
pcs constraint location add id rsc node score [resource-discovery=option]
resource-discovery オプションに指定できる値を説明しています。
表7.2 リソース検出の値
| 値 | 説明 |
|---|---|
always
|
このノードに指定したリソースで、リソース検出を常に実行します。これは、リソースの場所の制約のデフォルトの
resource-discovery 値です。
|
never
|
このノードで指定ししたリソースでのリソース検出は実行しません。
|
exclusive
|
指定したリソース(および
exclusiveとしてマークされている他のノード)でのみ、リソース検出を実行します。異なるノード間で同じリソースの exclusive 検出を使用する複数の場所制約により、resource-discovery が排他的なノードのサブセットが作成されます。リソースが 1 つ以上のノードの exclusive 検出用にマークされている場合、そのリソースは、そのノードのサブセット内にのみ配置できます。
|
resource-discovery オプションを never または exclusive に設定すると、クラスターが認識しなくても、該当する場所でリソースがアクティブになる可能性があることに注意してください。これにより、サービスがクラスター制御外( systemd または管理者など)以外で起動すると、複数の場所でリソースがアクティブになる可能性があります。これは、クラスターの一部がダウンしたりスプリットブレインが発生しているときに resource-discovery プロパティーが変更された場合や、そのノードでリソースがアクティブになっている間に resource-discovery プロパティーがリソースおよびノードのリソースに対して変更された場合にも発生する可能性があります。そのため、ノードの数が 9 以上で、特定の場所しかリソースを実行できない場合 (必要なソフトウェアが他の場所にインストールされていない場合など) に限り、このオプションは適しています。
7.1.3. ルールを使用したリソースの場所の確定
score を省略すると、デフォルトで INFINITY に設定されます。resource-discovery を省略すると、デフォルトで always に設定されます。resource-discovery オプションの詳細は、「高度な場所の制約」 を参照してください。基本的な場所の制約と同様に、制約にリソースの正規表現を使用することもできます。
score の値を正または負の値にすることができます。正の値は "prefers" を示し、負の値は "avoids" を示します。
pcs constraint location rsc rule [resource-discovery=option] [role=master|slave] [score=score | score-attribute=attribute] expression
defined|not_defined attributeattribute lt|gt|lte|gte|eq|ne [string|integer|version] valuedate gt|lt date日付範囲内の 日付date in-range date to duration duration_options ...date-spec date_spec_options式 および|or 式(expression)
# pcs constraint location Webserver rule score=INFINITY date-spec years=2018
# pcs constraint location Webserver rule score=INFINITY date-spec hours="9-16" weekdays="1-5"
# pcs constraint location Webserver rule date-spec weekdays=5 monthdays=13 moon=47.1.4. 場所の制約ストラテジー
- オプトインクラスター - デフォルトでは、すべてのリソースを、どのノードでも実行できません。そして、特定のリソースに対してノードを選択的に許可できるようにクラスターを設定します。オプトインクラスターの設定方法は 「オプトインクラスターの設定」 で説明しています。
- オプトアウトクラスター - デフォルトでは、すべてのリソースをどのノードでも実行できるクラスターを設定してから、リソースを特定のノードで実行しないように、場所の制約を作成します。オプトアウトクラスターの設定方法は 「オプトアウトクラスターの設定」 で説明しています。これは、デフォルトの Pacemaker ストラテジーです。
7.1.4.1. オプトインクラスターの設定
symmetric-cluster を false に設定し、デフォルトでは、いずれの場所でもリソースが実行されないようにします。
# pcs property set symmetric-cluster=falseWebserver リソースでは example-1 ノードが優先され、Database リソースでは example-2 ノードが優先され、優先ノードに障害が発生した場合は両方のリソースが example-3 ノードにフェイルオーバーできるようにします。オプトインクラスターに場所の制約を設定する場合は、スコアをゼロに設定すると、リソースに対してノードの優先や回避を指定せずに、リソースをノードで実行できます。
#pcs constraint location Webserver prefers example-1=200#pcs constraint location Webserver prefers example-3=0#pcs constraint location Database prefers example-2=200#pcs constraint location Database prefers example-3=0
7.1.4.2. オプトアウトクラスターの設定
symmetric-cluster クラスタープロパティーを true に設定して、デフォルトですべてのリソースがどこでも実行できるようにします。
# pcs property set symmetric-cluster=trueexample-3 ノードにフェイルオーバーできます。
#pcs constraint location Webserver prefers example-1=200#pcs constraint location Webserver avoids example-2=INFINITY#pcs constraint location Database avoids example-1=INFINITY#pcs constraint location Database prefers example-2=200
7.1.5. 現在のノードを優先させるリソースの設定
resource-stickiness 値があります。resource-stickiness 値は、現在実行しているノード上にリソースが残す量を決定します。Pacemaker は、他の設定(場所の制約の score 値など)とともに resource-stickiness 値を考慮して、リソースを別のノードに移動するか、そのまま残すかを決定します。
resource-stickiness の値が 0 の状態でリソースが作成されます。resource-stickiness が 0 に設定され、場所の制約がない Pacemaker のデフォルト動作では、クラスターノード間で均等に分散されるようにリソースを移動します。この設定では、正常なリソースの移動頻度が想定よりも増える可能性があります。この動作を防ぐには、デフォルトの resource-stickiness 値を 1 に設定します。このデフォルトはクラスター内のすべてのリソースに適用されます。この小さい値は、作成する他の制約で簡単に上書きできますが、Pacemaker がクラスター全体で正常なリソースを不必要に移動しないようにするには十分です。
# pcs resource defaults resource-stickiness=1resource-stickiness 値が設定されている場合、リソースは新たに追加されたノードに移動されません。この時点でリソースバランシングが必要な場合は、resource-stickiness の値を一時的に 0 に設定できます。
7.2. 順序の制約
pcs constraint order [action] resource_id then [action] resource_id [options]
表7.3 順序の制約のプロパティー
| フィールド | 説明 |
|---|---|
|
resource_id
|
動作を行うリソースの名前。
|
|
action
|
リソースで実行する動作。action プロパティーでは、以下の値が使用できます。
*
start - リソースを開始します。
*
stop - リソースを停止します。
*
promote - リソースをスレーブリソースからマスターリソースにプロモートします。
*
demote - マスターリソースからスレーブリソースにリソースをデモートします。
アクションを指定しないと、デフォルトのアクションは
start になります。マスターリソースとスレーブリソースについての詳細は 「多状態のリソース: 複数モードのリソース」 を参照してください。
|
kind オプション
|
制約の実施方法。
kind オプションでは、以下の値を使用できます。
*
オプション - 両方のリソースが指定されたアクションを実行する場合にのみ適用されます。オプションの順序は 「勧告的な順序付け」 を参照してください。
*
必須 - 常に(デフォルト値)1 番目に指定したリソースが停止している場合や起動できない場合は、2 番目に指定したリソースが停止します。必須の順序の詳細は、「強制的な順序付け」 を参照してください。
*
シリアル化 - 一連のリソースに対して、2 つの停止/開始アクションが同時に実行されないようにします。
|
対称 オプション
|
7.2.1. 強制的な順序付け
kind オプションのデフォルト値です。デフォルト値のままにしておくと 1 番目に指定しているリソースの状態が変化した場合、2 番目に指定したリソー スが必ず反応するようになります。
- 1 番目に指定している実行中のリソースを停止すると、2 番目に指定しているリソースも停止されます (実行している場合)。
- 1 番目に指定している実行中のリソースが実行しておらず起動できない場合には、指定したリソースは (実行していれば) 停止します。
- 2 番目に指定しているリソースの実行中に 1 番目に指定しているリソースが再起動されると、2 番目に指定しているリソースが停止され再起動されます。
7.2.2. 勧告的な順序付け
kind=Optional オプションを指定すると、制約は任意と見なされ、両方のリソースが指定のアクションを実行する場合のみ適用されます。1 番目に指定しているリソースの状態を変更しても、2 番目に指定しているリソースには影響しません。
VirtualIP および dummy_resource という名前のリソースのアドバイザリーの順序制約を設定します。
# pcs constraint order VirtualIP then dummy_resource kind=Optional 7.2.3. 順序付けされたリソースセット
- リソースを順番に起動するように設定する必要があるものの、リソースは必ずしも同じ場所に配置しない場合
- リソース C の前にリソース A または B のいずれかが起動する必要があるものの、A と B の間には関係が設定されていない場合
- リソース C およびリソース D の前にリソース A およびリソース B の両方が起動している必要があるものの、A と B、または C と D の間には関係が設定されていない場合
sequential。trueまたはfalseに設定して、リソースセットを相互に相対的に並べる必要があるかどうかを指定します。sequentialをfalseに設定すると、セットのメンバーが互いに相対的に順序付けされることなく、順序の制約内の他のセットとの関連で順序付けることができます。そのため、このオプションは、制約に複数のセットが登録されている場合に限り有効です。それ以外の場合は、制約を設定しても効果がありません。require-all: 続行する前にセット内のすべてのリソースがアクティブである必要があるかどうかを指定します。trueまたはfalseに設定できます。require-allをfalseに設定すると、次のセットに進む前に、セット内の 1 つのリソースのみを起動する必要があります。require-allをfalseに設定しても、シーケンシャルがfalseに設定されている順序なしのセットと併用されない限り、効果はありません。
setoptions パラメーターの後に、リソースのセットに対する以下の制約オプションを設定できます。
id: 定義する制約の名前を指定します。score: 制約の優先度を示します。このオプションの詳細は 表7.4「コロケーション制約のプロパティー」 を参照してください。
pcs constraint order set resource1 resource2 [resourceN]... [options] [set resourceX resourceY ... [options]] [setoptions [constraint_options]]
D1、D2、および D3 という名前の 3 つのリソースがある場合、次のコマンドはそれらを順序付けされたリソースセットとして設定します。
# pcs constraint order set D1 D2 D37.2.4. 順序の制約からリソースを削除
pcs constraint order remove resource1 [resourceN]...
7.3. リソースのコロケーション
pcs constraint colocation add [master|slave] source_resource with [master|slave] target_resource [score] [options]
表7.4 コロケーション制約のプロパティー
| フィールド | 説明 |
|---|---|
|
source_resource
|
コロケーションソース。制約の条件を満たさない場合、クラスターではこのリソースの実行を許可しないことを決定する可能性があります。
|
|
target_resource
|
コロケーションターゲット。クラスターは、このリソースの配置先を決定してから、ソースリソースの配置先を決定します。
|
|
score
|
正の値を指定するとリソースが同じノードで実行します。負の値を指定すると同じノードで実行しなくなります。デフォルト値である +
INFINITY を指定すると、source_resource は target_resource と同じノードで実行する必要があることを示します。-INFINITY の値は、source_resource を target_resource と同じノードで実行してはならないことを示します。
|
7.3.1. 強制的な配置
+INFINITY または -INFINITY であるたびに発生します。制約条件が満たされないと source_resource の実行が許可されません。score=INFINITY の場合、これには、target_resource がアクティブではないケースが含まれます。
myresource1 を、常に myresource2 と同じマシンで実行する必要がある場合は、次の制約を追加します。
# pcs constraint colocation add myresource1 with myresource2 score=INFINITYINFINITY が使用されるため、(何らかの理由で) myresource2 がどのクラスターノードでも実行できない場合、myresource1 の実行は許可されません。
myresource1 が myresource2 と同じマシンで実行できないクラスターを設定することもできます。この場合は、score=-INFINITYを使用します。
# pcs constraint colocation add myresource1 with myresource2 score=-INFINITY-INFINITY を指定することで、制約はバインドされます。したがって、実行したい場所が残っている場所が myresource2 である場合、myresource1 はどこにも実行できません。
7.3.2. 勧告的な配置
-INFINITY より大きく、INFINITY より小さい場合、クラスターはユーザーの希望に対応しようとしますが、クラスターリソースの一部を停止するという選択肢がある場合には無視できます。勧告的なコロケーション制約と設定の他の要素を組み合わせると、強制的であるように動作させることができます。
7.3.3. 複数リソースのコロケート
- リソースのセットにコロケーションを設定する必要があるものの、リソースが必ずしも順番に起動する必要がない場合
- リソース A または B のいずれかに対してコロケーションを設定する必要があるリソース C が起動したものの、A と B の間に関係が設定されていない場合。
- リソース C およびリソース D を、リソース A およびリソース B の両方に対してコロケーションを設定する必要があるものの、A と B の間、または C と D の間に関係が設定されていない場合
sequential。セットのメンバーが相互にコロケーションする必要があるかどうかを示すtrueまたはfalseに設定できます。sequentialをfalseに設定すると、このセットのどのメンバーがアクティブであるかに関係なく、このセットのメンバーを制約の後半に一覧表示されている別のセットと同じ場所に配置できます。そのため、このオプションは制約でこのセットの後に他のセットが指定されている場合に限り有効です。他のセットが指定されていない場合は、制約の効果がありません。
setoptions パラメーターの後に、リソースのセットに対する以下の制約オプションを設定できます。
kind: 制約の実行方法を示します。このオプションの詳細は 表7.3「順序の制約のプロパティー」 を参照してください。symmetrical: リソースを停止する順序を示します。デフォルトの true に設定されていると逆順でリソースの停止を行ないます。デフォルト値:trueid: 定義する制約の名前を指定します。
pcs constraint colocation set resource1 resource2 [resourceN]... [options] [set resourceX resourceY ... [options]] [setoptions [constraint_options]]
7.3.4. コロケーション制約の削除
pcs constraint colocation remove source_resource target_resource
7.4. 制約の表示
pcs constraint list|show
resourcesを指定すると、リソースごとに場所の制約が表示されます。これはデフォルトの動作です。nodesを指定すると、ノードごとに場所の制約が表示されます。- 特定のリソースまたはノードを指定すると、そのリソースまたはノードの情報のみが表示されます。
pcs constraint location [show resources|nodes [specific nodes|resources]] [--full]
--full オプションを指定すると、制約の内部 ID が表示されます。
pcs constraint order show [--full]
--full オプションを指定すると、制約の内部 ID が表示されます。
pcs constraint colocation show [--full]
pcs constraint ref resource ...
第8章 クラスターリソースの管理
8.1. リソースを手作業で移動する
- ノードがメンテナンスで、そのノードで実行中の全リソースを別のノードに移行する必要がある
- 個別に指定したリソースを移行する必要がある
- 「現在のノードからリソースを移動」 の説明のように、pcs resource move コマンドを使用して現在稼働しているノードからリソースを移動します。
- pcs resource relocate run コマンドを使用して、現在のクラスターのステータス、制約、リソースの場所、およびその他の設定によって決定される優先ノードにリソースを移動します。このコマンドの詳細は、「リソースの優先ノードへの移動」 を参照してください。
8.1.1. 現在のノードからリソースを移動
destination_node を指定します。
pcs resource move resource_id [destination_node] [--master] [lifetime=lifetime]
--master パラメーターを指定すると、制約の範囲がマスターロールに限定され、resource_id ではなく master_id を指定する必要があります。
pcs resource move コマンドに lifetime パラメーターを設定すると、制約が続く期間を指定できます。ISO 8601 で定義されている形式に従って ライフタイム パラメーターの単位を指定します。この場合、単位は Y (例:年)、M (月用)、W (週)、D (日)、H (時(分)、および S (分)など)として指定する必要があります。
lifetime パラメーターが 5M の場合、間隔は 5 カ月で、有効 期間が PT5M の場合は、間隔が 5 分になります。
lifetime パラメーターは、cluster -recheck-interval クラスター プロパティーで定義される間隔でチェックされます。デフォルト値は 15 分です。このパラメーターをより頻繁に確認する必要がある場合は、次のコマンドを実行して、この値をリセットできます。
pcs property set cluster-recheck-interval=value
pcs resource move コマンドに --wait[=n] パラメーターを設定し、移行先ノードでリソースが起動するのを待機する秒数を指定できます。この間に、リソースが起動した場合に 0 が返され、リソースが起動していない場合は 1 が返されます。n の値を指定しないと、デフォルトのリソースのタイムアウト値が使用されます。
resource1 リソースを example-node2 ノードに移動し、1 時間 30 分は元のノードに戻らないようにします。
pcs resource move resource1 example-node2 lifetime=PT1H30M
resource1 リソースを example-node2 ノードに移動し、30 分間実行していたノードに戻らないようにします。
pcs resource move resource1 example-node2 lifetime=PT30M
8.1.2. リソースの優先ノードへの移動
pcs resource relocate run [resource1] [resource2] ...
8.2. 障害発生によるリソースの移動
migration-threshold オプションを設定することで、定義した回数失敗した後にリソースが新しいノードに移動されるように設定できます。このしきい値に一度到達すると、このノードでは、以下が行われるまで、障害が発生したリソースを実行できなくなります。
- 管理者は pcs resource failcount コマンドを使用して、リソースの
failcountを手動でリセットします。 - リソースの
failure-timeout値に到達します。
migration-threshold の値は、デフォルトで INFINITY に設定されています。INFINITY は非常に大きいものとして内部的に定義されますが、有限数です。値が 0 の場合は、migration-threshold 機能が無効になります。
migration-threshold を設定するのと同じことは、リソースが状態を失うことなく別の場所に移動する、移行用のリソースを設定するのと同じです。
dummy_resource という名前のリソースに移行しきい値 10 を追加します。これは、10 回の失敗後にリソースが新しいノードに移動することを示しています。
# pcs resource meta dummy_resource migration-threshold=10
# pcs resource defaults migration-threshold=10start-failure-is-fatal が true (デフォルト)に設定されている場合、起動の失敗により failcount が INFINITY に設定され、リソースが常に即座に移動するようになります。start-failure-is-fatal オプションの詳細は、表12.1「クラスターのプロパティー」 を参照してください。
8.3. 接続状態変更によるリソースの移動
pingリソースをクラスターに追加します。pingリソースは、同じ名前のシステムユーティリティーを使用して、マシン(DNS ホスト名または IPv4/IPv6 アドレスで指定された)のリストにアクセスでき、その結果を使用してpingdと呼ばれるノード属性を維持しているかどうかをテストします。- 接続が失われたときに別のノードにリソースを移動させる、リソース場所制約を設定します。
ping リソースに設定できるプロパティーを示します。
表8.1 ping リソースのプロパティー
| フィールド | 説明 |
|---|---|
dampen
| |
multiplier
| |
host_list
|
gateway.example.com への接続を検証する ping リソースを作成します。実際には、ネットワークゲートウェイやルーターへの接続を検証します。リソースがすべてのクラスターノードで実行されるように、ping リソースをクローンとして設定します。
# pcs resource create ping ocf:pacemaker:ping dampen=5s multiplier=1000 host_list=gateway.example.com cloneWebserver という名前の既存のリソースに場所の制約ルールを設定します。これにより、Webserver リソースが現在実行しているホストが gateway.example.com に ping できない場合に、Webserver リソースを gateway.example.com に ping できるホストに移動します。
# pcs constraint location Webserver rule score=-INFINITY pingd lt 1 or not_defined pingd8.4. クラスターリソースの有効化、無効化、および禁止
--wait オプションを指定すると、pcs はリソースが停止するまで n 秒間待機し、リソースが停止している場合は 0 を返し、リソースが停止しなかった場合は 1 を返します。n を指定しないと、デフォルトの 60 分に設定されます。
pcs resource disable resource_id [--wait[=n]]
--wait オプションを指定すると、pcs はリソースが開始するまで最長で n 秒間待機し、リソースが起動した場合は 0、リソースが開始されなかった場合は 1 を返します。n を指定しないと、デフォルトの 60 分に設定されます。
pcs resource enable resource_id [--wait[=n]]
pcs resource ban resource_id [node] [--master] [lifetime=lifetime] [--wait[=n]]
--master パラメーターを指定すると、制約の範囲がマスターロールに制限され、resource_id ではなく master_id を指定する必要があります。
pcs resource ban コマンドに lifetime パラメーターを設定すると、制約が続く期間を指定できます。lifetime パラメーターの単位や、lifetime パラメーターがチェックされる間隔を指定する方法については、「リソースを手作業で移動する」 を参照してください。
pcs resource ban コマンドに --wait[=n] パラメーターを設定し、移行先ノードでリソースが起動するのを待機する秒数を指定できます。この間に、リソースが起動した場合に 0 が返され、リソースが起動していない場合は 1 が返されます。n の値を指定しないと、デフォルトのリソースのタイムアウト値が使用されます。
pcs resource debug-start resource_id
8.5. モニター操作の無効化
enabled="false" を操作の定義に追加します。監視操作を再度有効にするには、操作の定義に enabled="true" を設定します。
#pcs resource update resourceXZY op monitor enabled=false#pcs resource update resourceXZY op monitor enabled=true
# pcs resource update resourceXZY op monitor timeout=600 enabled=true8.6. 管理リソース
unmanaged モードに設定できます。このモードでは、リソースは設定に残りますが Pacemaker はリソースを管理しません。
unmanaged モードに設定します。
pcs resource unmanage resource1 [resource2] ...
管理 モードに設定します。
pcs resource manage resource1 [resource2] ...
managed または unmanaged モードに設定し、含まれているリソースを個別に管理できます。
第9章 高度な設定
9.1. リソースのクローン
ext4 などの非クラスター化ファイルシステムをマウントする Filesystem リソースのクローンは作成しないでください。ext4 パーティションはクラスターを認識しないため、このファイルシステムは同時に複数のノードから発生する読み取り/書き込み操作には適していません。
9.1.1. クローンリソースの作成と削除
pcs resource create resource_id standard:provider:type|type [resource options] \ clone [meta clone_options]
resource_id-clone になります。
pcs resource clone resource_id | group_name [clone_options]...
resource_id-clone または group_name-clone になります。
-clone を付けた名前になります。次のコマンドは、webfarm という名前のタイプ apache のリソースと、 webfarm -clone という名前のそのリソースのクローンを作成します。
# pcs resource create webfarm apache cloneinterleave=true オプションを設定する必要があります。これにより、依存されているクローンが同じノードで停止または開始した時に、依存しているクローンのコピーを停止または開始できるようになります。このオプションを設定しない場合は、次のようになります。クローンリソース B がクローンリソース A に依存していると、ノードがクラスターから離れてから戻ってきてから、そのノードでリソース A が起動すると、リソース B の全コピーが、全ノードで再起動します。これは、依存するクローンリソースに interleave オプションが設定されていない場合、そのリソースのすべてのインスタンスは、そのリソースの実行中のインスタンスに依存するためです。
pcs resource unclone resource_id | group_name
表9.1 リソースのクローンオプション
| フィールド | 説明 |
|---|---|
priority, target-role, is-managed
|
表6.3「リソースのメタオプション」 に従って、クローンされたリソースから継承されるオプション。
|
clone-max
| |
clone-node-max
| |
notify
| |
globally-unique
|
クローンの各コピーで異なる機能を実行させるかどうか。使用できる値は
false、trueです。
このオプションの値が
false の場合、これらのリソースは実行中のすべての場所で同じように動作するため、マシンごとにアクティブなクローンのコピーは 1 つだけです。
このオプションの値が
true の場合、あるマシンで実行しているクローンのコピーは、そのインスタンスが別のノードで実行されているか、同じノード上で実行されているかに関係なく、別のインスタンスと同等ではありません。clone-node-max の値が 1 より大きい場合、デフォルト値は true です。そうでない場合は、デフォルト値は false です。
|
ordered
| |
interleave
| |
clone-min
|
値を指定すると、
interleave オプションが true に設定されていても、元のクローンの後に順序付けされたクローンは、元のクローンで指定された数のインスタンスが実行されるまで起動できません。
|
9.1.2. 制約のクローン作成
clone-max には、クラスター内のノードの合計数より小さい値に設定できます。この場合は、リソースの場所の制約を使用して、クラスターが優先的にコピーを割り当てるノードを指定できます。クローンの ID を使用する点以外、制約は通常のリソースの場合と全く変わらずクローンに記述されます。
webfarm-clone を node1 に優先的に割り当てる場所の制約を作成します。
# pcs constraint location webfarm-clone prefers node1interleave クローンオプションがデフォルトの false のままであるため、起動する必要がある webfarm-clone のすべてのインスタンスが完了するまで、webfarm-stats のインスタンスは起動しません。webfarm-clone のコピーを開始できない場合にのみ、webfarm-stats がアクティブではなくなります。さらに、webfarm-clone は、webfarm-stats が停止するのを待ってから、それ自体を停止します。
# pcs constraint order start webfarm-clone then webfarm-statswebfarm-stats が webfarm-clone のアクティブなコピーと同じノードで実行されるようにします。
# pcs constraint colocation add webfarm-stats with webfarm-clone9.1.3. 粘着性のクローン作成
resource-stickiness の値を指定しないと、クローンは 1 の値を使用します。値を小さくすることで他のリソースのスコア計算への阻害を最小限に抑えながら、Pacemaker によるクラスター内の不要なコピーの移動を阻止することができます。
9.2. 多状態のリソース: 複数モードのリソース
Master および Slave )のいずれかにすることができます。モードの名前には特別な意味はありませんが、インスタンスの起動時に Slave 状態で起動する必要があるという制限があります。
pcs resource create resource_id standard:provider:type|type [resource options] master [master_options]
resource_id-master になります。
pcs resource create resource_id standard:provider:type|type [resource options] --master [meta master_options]
resource_id-master または group_name-master になります。
pcs resource master master/slave_name resource_id|group_name [master_options]
表9.2 多状態リソースのプロパティー
| フィールド | 説明 |
|---|---|
id
|
多状態リソースに付ける名前
|
priority、target-role、is-managed
|
表6.3「リソースのメタオプション」を参照してください。
|
clone-max、clone-node-max、notify、globally-unique、ordered、interleave
|
表9.1「リソースのクローンオプション」を参照してください。
|
master-max
| |
master-node-max
|
9.2.1. 多状態リソースの監視
ms_resource のマスターリソースに 11 秒の間隔の監視操作を設定します。この監視操作は、10 秒間隔で行われるデフォルトの監視操作とは別に追加されます。
# pcs resource op add ms_resource interval=11s role=Master9.2.2. 多状態制約
pcs constraint colocation add [master|slave] source_resource with [master|slave] target_resource [score] [options]
promote で、リソースがスレーブからマスターへプロモートされることを意味します。さらに、リソースを 降格 アクションで指定できます。これは、リソースがマスターからスレーブに降格されることを示します。
pcs constraint order [action] resource_id then [action] resource_id [options]
9.2.3. 多状態の粘着性 (Stickiness)
9.3. リソースとしての仮想ドメインの設定
VirtualDomain をリソースタイプとして指定して、libvirt 仮想化フレームワークが管理する仮想ドメインをクラスターリソースとして設定できます。
- 仮想ドメインは、クラスターリソースとして設定する前に停止する必要があります。
- 仮想ドメインをクラスターリソースにすると、クラスターツールを使用しない限り、起動、停止、または移行を行うことができません。
- クラスターリソースとして設定した仮想ドメインを、ホストの起動時に起動するように設定することはできません。
- すべてのノードは、それぞれの管理される仮想ドメインの必要な設定ファイルおよびストレージデバイスにアクセスできる必要があります。
VirtualDomain リソースに設定できるリソースオプションを説明します。
表9.3 仮想ドメインリソースのリソースオプション
| フィールド | デフォルト | 説明 |
|---|---|---|
config
| |
(必須)この仮想ドメインの
libvirt 設定ファイルへの絶対パス。
|
hypervisor
|
システムに依存
|
接続先のハイパーバイザーの URI。virsh --quiet uri コマンドを実行すると、システムのデフォルト URI を確認できます。
|
force_stop
| 0
|
停止時にドメインを常に強制的にシャットダウン (破棄) します。デフォルト動作では、正常なシャットダウンの試行に失敗した後でのみ、強制シャットダウンを実行します。これは、仮想ドメイン(または仮想化バックエンド)が正常なシャットダウンに対応していない場合にのみ
true に設定する必要があります。
|
migration_transport
|
システムに依存
|
移行中にリモートハイパーバイザーに接続するのに使用されるトランスポート。このパラメーターを省略すると、リソースは
libvirt のデフォルトトランスポートを使用して、リモートハイパーバイザーに接続します。
|
migration_network_suffix
| |
専用の移行ネットワークを使用します。移行 URI は、このパラメーターの値をノード名の末尾に追加することにより設定されます。ノード名が完全修飾ドメイン名 (FQDN) の場合は、FQDN の最初のピリオド (.) の直前に接尾辞を挿入します。この設定されたホスト名がローカルで解決可能であり、関連する IP アドレスが優先ネットワークを介して到達可能であることを確認してください。
|
monitor_scripts
| |
仮想ドメイン内でサービスの監視を追加で実行する場合は、監視するスクリプトのリストとともに、このパラメーターを追加します。注記: 監視スクリプトを使用する場合、
start および migrate_from の操作は、すべての監視スクリプトが正常に完了した場合にのみ完了します。この遅延に対応できるように、この操作のタイムアウトを必ず設定してください。
|
autoset_utilization_cpu
| true
| true に設定すると、エージェントは virsh から domainU のvCPU数を検出し、モニターの実行時にリソースの CPU 使用率に置きます。
|
autoset_utilization_hv_memory
| true
|
true に設定すると、エージェントは
virsh から Max memory 数を検出し、モニターの実行時にソースの hv_memory 使用率にします。
|
migrateport
|
ランダムハイポート
|
このポートは
qemu の移行 URI で使用されます。これを設定しないと、ポートにはランダムハイポートが使用されます。
|
snapshot
| |
仮想マシンイメージが保存されるスナップショットディレクトリーへのパス。このパラメーターが設定されている場合、仮想マシンの RAM 状態は、停止時にスナップショットディレクトリーのファイルに保存されます。起動時にドメインのステータスファイルが存在すると、ドメインは、最後に停止する直前の状態に復元されます。このオプションは、
force_stop オプションと互換性がありません。
|
VirtualDomain リソースオプションに加えて、allow-migrate メタデータオプションを設定して、リソースの別のノードへのライブマイグレーションを可能にします。このオプションを true に設定すると、状態を失うことなくリソースを移行できます。このオプションがデフォルトの状態である false に設定されている場合、仮想ドメインは最初のノードでシャットダウンされ、2 番目のノードから別のノードに移行するときに 2 番目のノードで再起動されます。
VirtualDomain リソースを作成します。
- 仮想マシンを管理するために
VirtualDomainリソースエージェントを作成する場合、Pacemaker では、ディスクのファイルに仮想マシンの xml 設定ファイルをダンプする必要があります。たとえば、guest1という名前の仮想マシンを作成した場合は、ホストのどこかのファイルに xml をダンプします。任意のファイル名を使用できますが、この例では/etc/pacemaker/guest1.xmlを使用します。#
virsh dumpxml guest1 > /etc/pacemaker/guest1.xml - ゲストノードが実行している場合はシャットダウンします。Pacemaker は、クラスターで設定されているノードを起動します。
- pcs resource create コマンドを使用して、
VirtualDomanリソースを設定します。たとえば、以下のコマンドは、VMという名前のVirtualDomainリソースを設定します。allow-migrateオプションはtrueに設定されているため、pcs resource move VM nodeXコマンドはライブ移行として実行されます。# pcs resource create VM VirtualDomain config=.../vm.xml \ migration_transport=ssh meta allow-migrate=true
9.4. pacemaker_remote サービス
pacemaker_remote サービスを使用すると、corosync を実行していないノードをクラスターに統合し、クラスターが実際のクラスターノードであるかのようにリソースを管理できます。
pacemaker_remote サービスが提供する機能には以下が含まれます。
pacemaker_remoteサービスを使用すると、RHEL 7.7 の Red Hat サポート制限である 32 ノードを超えた拡張が可能になります。pacemaker_remoteサービスを使用すると、仮想環境をクラスターリソースとして管理したり、仮想環境内の個別のサービスをクラスターリソースとして管理したりできます。
pacemaker_remote サービスの記述には、以下の用語が使用されます。
- クラスターノード: 高可用性サービスを実行するノード(
pacemakerおよびcorosync)。 - リモートノード:
pacemaker_remoteを実行するノードで、corosyncクラスターのメンバーシップを必要とせずにクラスターにリモートで統合します。リモートノードは、ocf:pacemaker:remoteリソースエージェントを使用するクラスターリソースとして設定されます。 - ゲストノード:
pacemaker_remoteサービスを実行する仮想ゲストノード。仮想ゲストリソースはクラスターにより管理されます。クラスターにより起動し、リモートノードとしてクラスターに統合されます。 - pacemaker_remote: Pacemaker クラスター環境のリモートノードおよびゲストノード (KVM および LXC) 内でリモートアプリケーション管理を実行できるサービスデーモン。このサービスは、corosync を実行していないノード上でリソースをリモートで管理できる Pacemaker のローカルリソース管理デーモン (LRMD) の強化バージョンです。
- l xc -
libvirt-lxcLinux コンテナードライバーで定義される Linux コンテナー。
pacemaker_remote サービスを実行している Pacemaker クラスターには、以下の特徴があります。
- リモートノードおよびゲストノードは、
pacemaker_remoteサービスを実行します(仮想マシン側で必要な設定はほとんどありません)。 - クラスターノードで実行しているクラスタースタック(
pacemakerおよびcorosync)はリモートノードでpacemaker_remoteサービスに接続し、クラスターに統合できます。 - クラスターノードで実行しているクラスタースタック(
pacemakerおよびcorosync)はゲストノードを起動し、ゲストノードでpacemaker_remoteサービスに即座に接続して、クラスターに統合できます。
- クォーラムでは実行されない
- フェンスデバイスのアクションを実行しません
- クラスターの指定コントローラー (DC) として機能できない
- それ自体が完全な pcs コマンドを実行していない
9.4.1. ホストとゲストの認証
pacemaker_remote を実行しているノードは、同じ秘密鍵を共有する必要があります。デフォルトでは、クラスターノードとリモートノードの両方でこのキーを /etc/pacemaker/authkey に配置する必要があります。
authkey を設定し、pcs cluster node add-remote コマンドはリモートノードの authkey をセットアップします。
9.4.2. ゲストノードリソースのオプション
VirtualDomain リソースを作成します。VirtualDomain リソースに設定できるオプションの説明は、表9.3「仮想ドメインリソースのリソースオプション」 を参照してください。
VirtualDomain リソースオプションのほかにも、メタデータオプションはリソースをゲストノードとして定義し、接続パラメーターを定義します。Red Hat Enterprise Linux 7.4 では、pcs cluster node add-guest コマンドを使用してこれらのリソースオプションを設定する必要があります。7.4 以前のリリースでは、リソースを作成する際に、これらのオプションを設定できます。表9.4「KVM/LXC リソースをリモートノードとして設定するメタデータオプション」 では、このようなメタデータオプションについて説明します。
表9.4 KVM/LXC リソースをリモートノードとして設定するメタデータオプション
| フィールド | デフォルト | 説明 |
|---|---|---|
remote-node
|
<none>
|
このリソースが定義するゲストノードの名前。リソースをゲストノードとして有効にし、ゲストノードの識別に使用される一意名を定義します。警告: この値を、リソースやノードの ID と重複させることはできません。
|
remote-port
|
3121
| pacemaker_remoteへのゲスト接続に使用するカスタムポートを設定します
|
remote-addr
|
ホスト名として使用される
remote-node 値
|
リモートノードの名前がゲストのホスト名ではない場合に接続する IP アドレスまたはホスト名
|
remote-connect-timeout
|
60s
|
保留中のゲスト接続がタイムアウトするまでの時間
|
9.4.3. リモートノードリソースのオプション
ocf:pacemaker:remote がリソースエージェントとして指定されたクラスターリソースとして定義されます。Red Hat Enterprise Linux 7.4 では、pcs cluster node add-remote コマンドを使用してこのリソースを作成する必要があります。7.4 以前のリリースでは、pcs resource create コマンドを使用してこのリソースを作成できます。表9.5「リモートノードのリソースオプション」 は、remote リソースに設定できるリソースオプションを説明します。
表9.5 リモートノードのリソースオプション
| フィールド | デフォルト | 説明 |
|---|---|---|
reconnect_interval
|
0
|
リモートノードへのアクティブな接続が切断された後、リモートノードへの再接続を試みる前に待機する時間 (秒単位)。この待機期間は繰り返し発生します。待機期間の後に再接続に失敗した場合、待機期間の後に、新しい再接続が試行されます。このオプションが使用されると、Pacemaker は待機期間の後に無限にリモートノードへ接続を試みます。
|
server
| |
接続するサーバーの場所。IP アドレスまたはホスト名を指定できます。
|
port
| |
接続する TCP ポート。
|
9.4.4. ポートのデフォルトの場所の変更
pacemaker_remote のいずれかのポートのデフォルトの場所を変更する必要がある場合は、これらのデーモンの両方に影響を与える PCMK_remote_port 環境変数を設定できます。この環境変数は、以下のように /etc/sysconfig/pacemaker ファイルに置くことで有効にできます。
#==#==# Pacemaker Remote ... # # Specify a custom port for Pacemaker Remote connections PCMK_remote_port=3121
PCMK_remote_port 変数をそのノードの /etc/sysconfig/pacemaker ファイルに設定する必要があります。また、ゲストノードまたはリモートノードの接続を作成するクラスターリソースを同じポート番号で設定する必要があります(ゲストノードの場合は remote-port メタデータオプション、リモートノードの場合は port オプションを使用します)。
9.4.5. 設定の概要: KVM ゲストノード
libvirt と KVM 仮想ゲストを使用して、Pacemaker で仮想マシンを起動し、そのマシンをゲストノードとして統合する手順の概要を説明します。
- 「リソースとしての仮想ドメインの設定」 で説明するように、
VirtualDomainリソースを設定します。 - Red Hat Enterprise Linux 7.3 以前を実行しているシステムでは、以下の手順に従って、すべてのクラスターノードと仮想マシン上で、パス
/etc/pacemaker/authkeyで同じ暗号鍵を配置します。これにより、リモート通信や認証を保護することができます。- すべてのノードで以下のコマンドセットを入力して、セキュアなパーミッションを持つ
authkeyディレクトリーを作成します。#
mkdir -p --mode=0750 /etc/pacemaker#chgrp haclient /etc/pacemaker - 以下のコマンドは、暗号化キーを作成する方法の 1 つを示しています。キーは 1 度だけ作成し、すべてのノードにコピーする必要があります。
#
dd if=/dev/urandom of=/etc/pacemaker/authkey bs=4096 count=1
- Red Hat Enterprise Linux 7.4 では、すべての仮想マシンで以下のコマンドを実行し、
pacemaker_remoteパッケージをインストールし、pcsdサービスを起動し、これを起動時に実行できるようにし、ファイアウォールを介して TCP ポート 3121 を許可します。#
yum install pacemaker-remote resource-agents pcs#systemctl start pcsd.service#systemctl enable pcsd.service#firewall-cmd --add-port 3121/tcp --permanent#firewall-cmd --add-port 2224/tcp --permanent#firewall-cmd --reloadRed Hat Enterprise Linux 7.3 以前では、すべての仮想マシンで以下のコマンドを実行し、pacemaker_remoteパッケージをインストールし、pacemaker_remoteサービスを起動してこれを起動時に実行できるようにし、ファイアウォールを介して TCP ポート 3121 を許可します。#
yum install pacemaker-remote resource-agents pcs#systemctl start pacemaker_remote.service#systemctl enable pacemaker_remote.service#firewall-cmd --add-port 3121/tcp --permanent#firewall-cmd --add-port 2224/tcp --permanent#firewall-cmd --reload - 各仮想マシンに、すべてのノードが認識できる静的ネットワークアドレスと一意なホスト名を割り当てます。ゲスト仮想マシンに静的 IP アドレスを設定する方法については、『仮想化の導入および管理ガイド』を参照してください。
- Red Hat Enterprise Linux 7.4 以降では、以下のコマンドを使用して、既存の
VirtualDomainリソースをゲストノードに変換します。このコマンドは、追加するゲストノードではなく、クラスターノードで実行する必要があります。リソースを変換する以外にも、このコマンドは/etc/pacemaker/authkeyをゲストノードにコピーし、ゲストノードでpacemaker_remoteデーモンを起動して有効にします。pcs cluster node add-guest hostname resource_id [options]
Red Hat Enterprise Linux 7.3 以前では、以下のコマンドを使用して既存のVirtualDomainリソースをゲストノードに変換します。このコマンドは、追加するゲストノードではなく、クラスターノードで実行する必要があります。pcs cluster remote-node add hostname resource_id [options]
VirtualDomainリソースの作成後は、クラスターの他のノードと同じように、ゲストノードを扱うことができます。たとえば、クラスターノードから実行される次のコマンドのように、リソースを作成し、リソースにリソース制約を設定してゲストノードで実行できます。Red Hat Enterprise Linux 7.3 時点では、ゲストノードをグループで含むことができ、ストレージデバイス、ファイルシステム、および VM をグループ化できます。#
pcs resource create webserver apache configfile=/etc/httpd/conf/httpd.conf op monitor interval=30s#pcs constraint location webserver prefers guest1
9.4.6. 設定概要: リモートノード (Red Hat Enterprise Linux 7.4)
- リモートノードを設定するノードで、ローカルファイアウォールを介してクラスター関連のサービスを許可します。
#
firewall-cmd --permanent --add-service=high-availabilitysuccess #firewall-cmd --reloadsuccess注記iptablesを直接使用する場合や、firewalld以外のファイアウォールソリューションを使用する場合は、TCP ポート 2224 および 3121 のポートを開くだけです。 - リモートノードに pacemaker_remote デーモンをインストールします。
#
yum install -y pacemaker-remote resource-agents pcs - リモートノードで
pcsdを起動し、有効にします。#
systemctl start pcsd.service#systemctl enable pcsd.service - リモートノードとして追加するノードに
pcsを認証していない場合は認証します。#
pcs cluster auth remote1 - 以下のコマンドを使用して、リモートノードリソースをクラスターに追加します。このコマンドは、関連するすべての設定ファイルを新しいノードに同期し、ノードを起動し、起動時に
pacemaker_remoteを開始するように設定します。このコマンドは、追加するリモートノードではなく、クラスターノードで実行する必要があります。#
pcs cluster node add-remote remote1 remoteリソースをクラスターに追加した後、リモートノードをクラスター内の他のノードを処理するのと同じように処理できます。たとえば、以下のコマンドをクラスターノードから実行すると、リソースを作成し、そのリソースにリソース制約を配置して、リモートノードで実行できます。#
pcs resource create webserver apache configfile=/etc/httpd/conf/httpd.conf op monitor interval=30s#pcs constraint location webserver prefers remote1警告リソースグループ、コロケーション制約、または順序制約でノード接続リソースを利用しないでください。- リモートノードのフェンスリソースを設定します。リモートノードは、クラスターノードと同じ方法でフェンスされます。クラスターノードと同様に、リモートノードで使用するフェンスリソースを設定します。リモートノードはフェンスアクションを開始できないことに注意してください。クラスターノードのみが、実際に別のノードに対してフェンシング操作を実行できます。
9.4.7. 設定概要: リモートノード (Red Hat Enterprise Linux 7.3 以前)
- リモートノードを設定するノードで、ローカルファイアウォールを介してクラスター関連のサービスを許可します。
#
firewall-cmd --permanent --add-service=high-availabilitysuccess #firewall-cmd --reloadsuccess注記iptablesを直接使用する場合や、firewalld以外のファイアウォールソリューションを使用する場合は、TCP ポート 2224 および 3121 のポートを開くだけです。 - リモートノードに pacemaker_remote デーモンをインストールします。
#
yum install -y pacemaker-remote resource-agents pcs - 適切に通信するには、すべてのノード (クラスターノードとリモートノードの両方) に同じ認証キーがインストールされている必要があります。既存ノードにすでにキーがある場合、そのキーを使用してリモートノードにコピーします。それ以外の場合はリモートノードで新しいキーを作成します。リモートノードで以下のコマンドを実行し、セキュアなパーミッションを持つ認証キーのディレクトリーを作成します。
#
mkdir -p --mode=0750 /etc/pacemaker#chgrp haclient /etc/pacemaker以下のコマンドは、リモートノードで暗号化キーを作成する方法の 1 つを示しています。#
dd if=/dev/urandom of=/etc/pacemaker/authkey bs=4096 count=1 - リモートノードで pacemaker_remote デーモンを開始して有効にします。
#
systemctl enable pacemaker_remote.service#systemctl start pacemaker_remote.service - クラスターノードにて、リモートノードの認証キーと同じパスを持つ共有された認証キーの保存場所を作成し、そのディレクトリーにキーをコピーします。この例では、キーが作成されたリモートノードからキーがコピーされます。
#
mkdir -p --mode=0750 /etc/pacemaker#chgrp haclient /etc/pacemaker#scp remote1:/etc/pacemaker/authkey /etc/pacemaker/authkey - クラスターノードから以下のコマンドを入力して、
remoteリソースを作成します。この場合、リモートノードはremote1になります。#
pcs resource create remote1 ocf:pacemaker:remote remoteリソースの作成後、リモートノードをクラスター内の他のノードを処理するのと同じように処理できます。たとえば、以下のコマンドをクラスターノードから実行すると、リソースを作成し、そのリソースにリソース制約を配置して、リモートノードで実行できます。#
pcs resource create webserver apache configfile=/etc/httpd/conf/httpd.conf op monitor interval=30s#pcs constraint location webserver prefers remote1警告リソースグループ、コロケーション制約、または順序制約でノード接続リソースを利用しないでください。- リモートノードのフェンスリソースを設定します。リモートノードは、クラスターノードと同じ方法でフェンスされます。クラスターノードと同様に、リモートノードで使用するフェンスリソースを設定します。リモートノードはフェンスアクションを開始できないことに注意してください。クラスターノードのみが、実際に別のノードに対してフェンシング操作を実行できます。
9.4.8. システムアップグレードおよび pacemaker_remote
pacemaker_remote サービスが停止すると、ノードを停止する前にクラスターがノードからリソースを正常に移行するようになりました。これにより、クラスターからノードを削除せずに、ソフトウェアのアップグレードやその他の定期的なメンテナンスを実行できるようになりました。ただし、pacemaker_remote がシャットダウンすると、クラスターは即座に再接続を試みます。リソースのモニタータイムアウト内に pacemaker_remote が再起動されない場合、クラスターは監視操作が失敗したと見なします。
pacemaker_remote サービスが停止したときに監視が失敗しないようにするには、以下の手順に従って、pacemaker_remote を停止する可能性があるシステム管理を実行する前に、ノードをクラスターから外すことができます。
pacemaker_remote が停止すると、クラスターはそのノードをフェンスします。yum update のプロセスの一部として自動的に停止した場合、システムが使用不可の状態になる可能性があります(特に pacemaker_remoteと同時にカーネルもアップグレードされる場合)。Red Hat Enterprise Linux 7.2 以前のリリースでは、以下の手順にしたがって、pacemaker_remote を停止する可能性のあるシステム管理を実行する前に、ノードをクラスターから外す必要があります。
- ノードからすべてのサービスを移動する pcs resource disable resourcename を使用して、ノードの接続リソースを停止します。ゲストノードの場合は、仮想マシンも停止するため、メンテナンスを実行するには、クラスターの外部で(たとえば、virshを使用して)VM を起動する必要があります。
- 必要なメンテナンスを実行します。
- ノードをクラスターに戻す準備ができたら、pcs resource enable でリソースを再度有効にします。
9.5. Docker コンテナーの Pacemaker サポート (テクノロジープレビュー)
- 「Pacemaker バンドルリソースの設定」 では、Pacemaker バンドルを作成するコマンドについて説明し、各バンドルパラメーターに定義できるパラメーターについてまとめた表が記載されています。
- 「バンドルでの Pacemaker リソースの設定」 では、Pacemaker バンドルに含まれているリソースの設定について説明しています。
- 「Pacemaker バンドルの制限」 では、Pacemaker バンドルの制限について説明しています。
- 「Pacemaker バンドル設定の例」 は、Pacemaker バンドルの設定例を説明しています。
9.5.1. Pacemaker バンドルリソースの設定
pcs resource bundle create bundle_id container docker [container_options] [network network_options] [port-map port_options]... [storage-map storage_options]... [meta meta_options] [--disabled] [--wait[=n]]
--disabled オプションを指定すると、バンドルは自動的に起動されません。--wait オプションを指定すると、Pacemaker は、バンドルが起動するまで最大 n 秒待機し、成功時、またはエラー時に 1 を返します。n を指定しないと、デフォルトの 60 分に設定されます。
9.5.1.1. Docker パラメーター
docker コンテナーオプションを説明します。
docker バンドルを設定する前に、Docker をインストールし、バンドルの実行が許可されているすべてのノードで完全に設定済みの Docker イメージを提供する必要があります。
表9.6 Docker コンテナーのパラメーター
| フィールド | デフォルト | 説明 |
|---|---|---|
image
|
Docker イメージタグ (必須)
| |
replicas
|
正の場合は
promoted-max の値。そうでない場合は 1 です。
|
起動するコンテナーインスタンスの数を指定する正の整数
|
replicas-per-host
|
1
|
単一ノードで起動できるコンテナーインスタンスの数を指定する正の整数
|
promoted-max
|
0
|
正であれば、非負の整数は、マスターロールにおいてサービスを実行できる多くのレプリカとともに、コンテナー化されたサービスが複数のサービスとして扱われる必要があることを示しています。
|
network
| |
これが指定されている場合、これは Docker コンテナーのネットワーク設定として docker run コマンドに渡されます。
|
run-command
| /usr/sbin/pacemaker_remoted バンドルにリソースが含まれる場合、それ以外はなし
|
このコマンドは、起動する際にコンテナー内で実行されます ("PID 1")。バンドルにリソースが含まれる場合、このコマンドは pacemaker_remoted デーモンを起動する必要があります(ただし、他のタスクを実行するスクリプトを使用することもできます)。
|
options
| |
docker run コマンドに渡す、追加のコマンドラインオプション
|
9.5.1.2. (バンドルネットワークパラメーター
ネットワーク オプションを説明します。
表9.7 バンドルリソースネットワークパラメーター
| フィールド | デフォルト | 説明 |
|---|---|---|
add-host
|
TRUE
|
TRUE で
ip-range-start が使用されている場合、Pacemaker は自動的に、コンテナー内の /etc/hosts ファイルに各レプリカ名と割り当てられた IP のエントリーがあることを確認します。
|
ip-range-start
| |
指定されている場合、Pacemaker は各コンテナーインスタンスに対して暗黙的な
ocf:heartbeat:IPaddr2 リソースを作成します。この IP アドレスは、Docker 要素の replicas パラメーターとして指定された数だけ連続アドレスを使用します。これらのアドレスは、ホストのネットワークから使用して、コンテナー内のサービスに到達できます。ただし、コンテナー自身の中では表示されません。現在サポートされているアドレスは、IPv4 のみです。
|
host-netmask
|
32
| ip-range-start が指定されている場合、IP アドレスは、この CIDR ネットマスクで(多数のビットとして)作成されます。
|
host-interface
| | ip-range-start が指定されている場合、IP アドレスはこのホストインターフェイスに作成されます(デフォルトでは、IP アドレスから決定されます)。
|
control-port
|
3121
|
バンドルに Pacemaker リソースが含まれる場合、クラスターは、コンテナー内の Pacemaker Remote との通信に、この整数 の TCP ポートを使用します。コンテナーがデフォルトポートでリッスンできない場合、これはコンテナーが
ip-range-start (この場合は replicas-per-host は 1 である必要があります)ではなくホストのネットワークを使用している場合や、バンドルがデフォルトポートですでにリッスンしている可能性がある場合に発生する可能性があります。ホストまたはコンテナーで設定されている PCMK_remote_port 環境変数は、バンドル接続に対して無視されます。
Pacemaker バンドル設定が
control-port パラメーターを使用する場合、バンドルに独自の IP アドレスがある場合は、corosync を実行しているすべてのクラスターノード、およびその IP アドレスでポートを開く必要があります。代わりに、バンドルが network="host" コンテナーパラメーターを設定している場合は、すべてのクラスターノードから各クラスターノードの IP アドレスでポートを開く必要があります。
|
httpd-bundle という名前のバンドルで replicas=2 が設定されている場合、そのコンテナーの名前は httpd-bundle-0 および httpd-bundle-1 になります。
port-map パラメーターをオプションで指定できます。表9.8「バンドルリソースポートマップパラメーター」 では、これらの port-map パラメーターを説明します。
表9.8 バンドルリソースポートマップパラメーター
| フィールド | デフォルト | 説明 |
|---|---|---|
id
| |
ポートマッピングの一意の名前 (必須)
|
port
| |
これが指定されている場合、ホストネットワーク上のこの TCP ポート番号(
ip-range-start が指定されている場合はコンテナーの割り当てられた IP アドレス上)への接続がコンテナーネットワークに転送されます。port または range のうち 1 つがポートマッピングで指定される必要があります。
|
internal-port
| portの値
| port と internal-port が指定されている場合、ホストのネットワーク上の ポート への接続は、コンテナーネットワーク上のこのポートに転送されます。
|
range
| | range が指定されている場合は、ホストネットワーク上( ip-range-start が指定されている場合は、コンテナーの割り当てられた IP アドレス上)上のこれらの TCP ポート番号( first_port-last_port)への接続が、コンテナーネットワーク内の同じポートに転送されます。port または range のうち 1 つだけをポートマッピングに指定する必要があります。
|
control-port をマッピングします。そのため、ポートマッピングでそのポートを指定する必要はありません。
9.5.1.3. バンドルストレージパラメーター
storage-map パラメーターを設定できます。表9.9「バンドルリソースストレージマッピングパラメーター」 では、これらのパラメーターを説明します。
表9.9 バンドルリソースストレージマッピングパラメーター
| フィールド | デフォルト | 説明 |
|---|---|---|
id
| |
ストレージマッピングの一意の名前 (必須)
|
source-dir
| |
コンテナーにマッピングされるホストファイルシステム上の絶対パス。
storage-map パラメーターを設定する際には、source-dir と source-dir-root のいずれかを指定する必要があります。
|
source-dir-root
| |
各コンテナーインスタンスのホスト上で異なるサブディレクトリーを使用した、コンテナーにマッピングされるホストのファイルシステム上のパスの開始。このサブディレクトリーには、バンドル名と同じ名前が付けられ、ダッシュと 0 から始まる整数カウンターも加えられます。
storage-map パラメーターを設定する際には、source-dir と source-dir-root の 1 つだけを指定する必要があります。
|
target-dir
| |
ホストストレージがマッピングされるコンテナー内のパス名 (必須)
|
options
| |
ストレージをマッピングする際に使用するファイルシステムマウントオプション
|
source-dir-root パラメーターを使用して命名される方法の例として、source-dir-root=/path/to/my/directory、target-dir=/srv/appdata、バンドルの名前が replicas=2 の mybundle という名前で、クラスターは mybundle- 0 と mybundle - 1 というホスト名を持つ 2 つのコンテナーインスタンスを作成します。そして、コンテナーを実行しているホストに /path/to/my/directory/mybundle-0 と / path/to/my /directory/mybundle-1 の 2 つのディレクトリー を作成します。各コンテナーには、これらのディレクトリーのいずれかが与えられ、コンテナー内で実行されているアプリケーションには /srv/appdata というディレクトリーが表示されます。
source-dir=/etc/pacemaker/authkeytarget-dir=/ etc/pacemaker/authkey および source-dir-root=/var/log/pacemaker/bundlestarget-dir=/var/ logと同等のものをコンテナーにマップするため、storage-map パラメーターを設定するときにこれらのパスを指定する必要はありません。
PCMK_authkey_location 環境変数は、クラスターのノード上の /etc/pacemaker/authkey のデフォルト以外に設定することはできません。
9.5.2. バンドルでの Pacemaker リソースの設定
ip-range-start または control-port をバンドルで設定する必要があります。Pacemaker は、接続用に暗黙的な ocf:pacemaker:remote リソースを作成し、コンテナー内で Pacemaker Remote を起動して、Pacemaker リモートを使用してリソースを監視および管理します。バンドルに複数のコンテナーインスタンス(レプリカ)がある場合、Pacemaker リソースは暗黙的なクローンとして機能します。バンドルが promoted-max オプションをゼロ以上に設定した場合、これは多状態クローンになります。
バンドル ID を指定して、pcs resource create コマンドで Pacemaker バンドルにリソースを作成します。リソースを含む Pacemaker バンドルの作成例は、「Pacemaker バンドル設定の例」 を参照してください。
docker オプション --net=none はリソースと併用しないでください。デフォルトの(コンテナー内の個別のネットワーク領域を使用)は、ip-range-start パラメーターと組み合わせて機能します。docker オプション --net=host が使用されている場合(コンテナーがホストのネットワーク領域を共有する)、バンドルごとに一意の control-port パラメーターを指定する必要があります。ファイアウォールでは、control-port へのアクセスを許可する必要があります。
9.5.2.1. ノード属性とバンドルリソース
container-attribute-target リソースメタデータ属性を使用すると、使用するアプローチを指定できます。host に設定されている場合、ユーザー定義のノード属性は基礎となるホストでチェックされます。その他の場合は、ローカルノード (この場合はバンドルノード) が使用されます。この動作はユーザー定義の属性にのみ適用されます。クラスターは、#uname などのクラスター定義属性に対してローカルノードを常にチェックします。
container-attribute-target が host に設定されている場合、クラスターは追加の環境変数をリソースエージェントに渡して、ノード属性を適切に設定します。
9.5.2.2. メタデータ属性とバンドルリソース
priority、target-role、is-managed などのオプションが含まれます。
9.5.3. Pacemaker バンドルの制限
- バンドルはグループに含まれていないことや、pcs コマンドで明示的にクローン化されていない場合もあります。これには、バンドルが含むリソースや、バンドルに対して Pacemaker によって明示的に作成されたリソースが含まれます。ただし、バンドルが
replicasの値が 1 より大きい場合、バンドルはクローンであるかのように動作することに注意してください。 - バンドルが管理されていない場合や、クラスターがメンテナンスモードの際に Pacemaker を再起動すると、バンドルが不具合を起こすことがあります。
- バンドルには、インスタンス属性、使用率属性、または操作がありません。しかし、バンドルに含まれるリソースには、これらがあります。
- リソースを含むバンドルは、バンドルが個別の
control-portを使用する場合にのみ、Pacemaker リモートノードで実行できます。
9.5.4. Pacemaker バンドル設定の例
httpd- bundle というバンドル ID で Pacemaker bundle を作成します。これには、httpd というリソース ID を持つ ocf:heartbeat:apache リソースが含まれます。
- Docker が、クラスターの各ノードでインストールされ有効化されている。
pcmktest:httpという名前の既存の Docker イメージがあります。- コンテナーイメージに、Pacemaker Remote デーモンが含まれている。
- コンテナーイメージに、設定済みの Apache Web サーバーが含まれている。
- クラスターのすべてのノードには、
/var/local/containers/httpd-bundle-0、/var/local/containers/httpd-bundle-1、および/var/local/containers/httpd-bundle-2ディレクトリーがあり、Web サーバーの root のindex.htmlファイルが含まれます。実稼働環境では、単一の共有ドキュメント root の方が高くなりますが、この例では、この設定では、Web サーバーに接続し、提供されるindex.htmlファイルを検証できるように、各ホスト上のindex.htmlファイルを異なるものにすることが可能です。
- バンドル ID は
httpd-bundleです。 - 以前に設定された Docker コンテナーイメージは
pcmktest:httpです。 - この例は、3 コンテナーインスタンスを起動します。
- この例では、コマンドラインオプション
--log-driver=journaldを docker run コマンドに渡します。このパラメーターは必須ではありませんが、追加のオプションを docker コマンドに渡す方法を示すために含まれています。--log-driver=journaldの値は、コンテナー内のシステムログが基礎となるホストのsystemdジャーナルにログインすることを意味します。 - Pacemaker は、3 つの連続した暗黙的な
ocf:heartbeat:IPaddr2リソースを作成します。これは、各コンテナーイメージ用に 1 つ、IP アドレス 192.168.122.131 で始まります。 - IP アドレスは、ホストインターフェイス eth0 で作成されます。
- IP アドレスは、CIDR ネットマスクが 24 で作成されます。
- この例では、
http-portのポートマップ ID を作成します。コンテナーの割り当てられた IP アドレスのポート 80 への接続がコンテナーネットワークに転送されます。 - この例では、
httpd-rootのストレージマップ ID を作成します。このストレージマッピングについて以下で説明します。source-dir-rootの値は/var/local/containersです。これは、各コンテナーインスタンスに対してホスト上の異なるサブディレクトリーを使用して、コンテナーにマップされるホストのファイルシステム上のパスの開始を指定します。target-dirの値は/var/www/htmlで、ホストストレージがマッピングされるコンテナー内のパス名を指定します。- ファイルシステム
rwマウントオプションは、ストレージのマッピング時に使用されます。 - この例のコンテナーにはリソースが含まれているため、Pacemaker は自動的にコンテナーに
source-dir=/etc/pacemaker/authkeyと同等のものをマッピングします。そのため、ストレージマッピングにそのパスを指定する必要はありません。
temp-cib.xml という名前の一時ファイルに配置され、temp-cib.xml.deltasrc という名前のファイルにコピーされます。クラスター設定に対するすべての変更は、tmp-cib.xml ファイルに対して行われます。udpates が完了すると、この手順では pcs cluster cib-push コマンドの diff-against オプションを使用して、設定ファイルへの更新のみがアクティブな設定ファイルにプッシュされるようにします。
#pcs cluster cib tmp-cib.xml#cp tmp-cib.xml tmp-cib.xml.deltasrc#pcs -f tmp.cib.xml resource bundle create httpd-bundle\container docker image=pcmktest:http replicas=3\options=--log-driver=journald\network ip-range-start=192.168.122.131 host-interface=eth0\host-netmask=24 port-map id=httpd-port port=80\storage-map id=httpd-root source-dir-root=/var/local/containers\target-dir=/var/www/html options=rw\ #pcs -f tmp-cib.xml resource create httpd ocf:heartbeat:apache\statusurl=http://localhost/server-status bundle httpd-bundle#pcs cluster cib-push tmp-cib.xml diff-against=tmp-cib.xml.deltasrc
9.6. 使用と配置ストラテジー
スティッキネス設定、各ノードのリソース の以前の障害履歴、各ノードの使用率などの要素の組み合わせから派生します。
- 特定のノードの容量
- 特定のリソースが必要な容量
- リソースの配置の全体的なストラテジー
9.6.1. 使用率属性
cpu という名前を設定します。また、RAM 容量の使用率属性を設定し、属性 memory に命名します。この例では、以下のように設定されています。
- ノード 1 は、CPU 容量 2 と、RAM 容量 2048 を指定するように定義されています。
- ノード 2 は、CPU 容量 4 と、RAM 容量 2048 を指定するように定義されています。
#pcs node utilization node1 cpu=2 memory=2048#pcs node utilization node2 cpu=4 memory=2048
- リソース
ダミーには、CPU 容量 1 と RAM 容量 1024 が必要です。 - リソース
ダミーには、2 の CPU 容量と RAM 容量 2048 が必要です。 - リソース
ダミー拡大には、CPU 容量 1 および 3072 の RAM 容量が必要です。
#pcs resource utilization dummy-small cpu=1 memory=1024#pcs resource utilization dummy-medium cpu=2 memory=2048#pcs resource utilization dummy-large cpu=3 memory=3072
9.6.2. 配置ストラテジー
placement-strategy クラスタープロパティーを設定する必要があります。そうしないと、容量の設定が効果がありません。クラスターのプロパティーの詳細は 12章Pacemaker クラスターのプロパティー を参照してください。
placement-strategy クラスタープロパティーには、4 つの値を使用できます。
default- 使用率の値は全く考慮されません。リソースは、割り当てスコアに従って割り当てられます。スコアが同じであれば、リソースはノード間で均等に分散されます。utilization- 使用率の値は、ノードが適格であると見なされるかどうか(つまり、リソースの要件を満たすのに十分な空き容量があるかどうか)を決定するときにのみ考慮されます。負荷分散は、ノードに割り当てられたリソースの数に基づいて行われます。balanced- 使用率の値は、ノードがリソースを提供する資格があるかどうかを決定するときと負荷分散を行う際に考慮されるため、リソースのパフォーマンスを最適化する方法でリソースを分散しようとします。minimal- 使用率の値は、ノードがリソースを提供する資格があるかどうかを決定する場合にのみ考慮されます。負荷分散は、できるだけ少ないノードにリソースを集中させて、残りのノードで電力を節約できるようにします。
placement-strategy の値を balanced に設定します。このコマンドを実行すると、Pacemaker は、複雑な一連のコロケーション制約を使用せずに、リソースからの負荷がクラスター全体に均等に分散されるようにします。
# pcs property set placement-strategy=balanced9.6.3. リソースの割り当て
9.6.3.1. ノードの優先順位
- 重みが最も高いノードが最初に消費されます。ノードの重みは、ノードの状態を表すためにクラスターによって維持されるスコアです。
- ノードの重みが、複数のノードで同じ場合は、以下のようになります。
placement-strategyクラスタープロパティーがdefaultまたはutilizationの場合:- 割り当てられているリソースの数が最も少ないノードが最初に使用されます。
- 割り当てられているリソースの数が等しい場合は、CIB に登録されている最初の対象ノードが最初に使用されます。
placement-strategyクラスタープロパティーが分散されている場合:- 空き容量が最も多いノードが最初に使用されます。
- ノードの空き容量が等しい場合は、割り当てられているリソースの数が最も少ないノードが最初に使用されます。
- ノードの空き容量が等しく、割り当てられているリソースの数が等しい場合は、CIB に最初に登録されている対象ノードが最初に使用されます。
placement-strategyクラスタープロパティーが最小限の場合、CIB に一覧表示されている最初の対象ノードが最初に使用されます。
9.6.3.2. ノードの容量
- 使用率属性が 1 種類だけ定義されている場合、空き容量は単純な数値比較となります。
- 定義されている使用属性の種類が複数になる場合は、ほとんどの属性タイプで数値が最も高いノードの空き容量が、最も大きくなります。以下に例を示します。
- NodeA の空き CPU が多く、NodeB の空きメモリーが多い場合は、互いの空き容量は等しくなります。
- NodeA の空き CPU が多く、NodeB の空きメモリーとストレージが多い場合、NodeB の方が空き容量が多くなります。
9.6.3.3. リソースの割り当て設定
- 優先度の最も高いリソースが最初に割り当てられます。リソースの優先度の設定は、表6.3「リソースのメタオプション」 を参照してください。
- リソースの優先度が等しい場合は、リソースのシャッフルを防ぐために、実行中のノードで最も高いスコアを持つリソースが最初に割り当てられます。
- リソースが実行しているノードのリソーススコアが等しい場合や、リソースが実行していない場合は、優先ノードで最もスコアが高いリソースが最初に割り当てられます。この場合、優先ノードのリソーススコアが等しい場合は、CIB に最初に登録されている実行可能なリソースが最初に割り当てられます。
9.6.4. リソース配置ストラテジーガイドライン
- 物理容量が十分にあることを確認します。ノードの物理容量が、通常の状態でほぼ最大に使用されているとすると、フェイルオーバーの際に問題が発生する可能性があります。使用率機能がなくても、タイムアウトや二次障害が発生する可能性があります。
- ノードに設定する容量にバッファーをいくつか構築します。物理的に存在するよりもわずかに多くのノードリソースが通知されます。ここでは、Pacemaker リソースが、設定した CPU、メモリーなどを常に 100% 使用しないことが想定されます。このような状況は、オーバーコミットと呼ばれることもあります。
- リソースの優先度を指定します。クラスターがサービスを犠牲にする場合、犠牲にするサービスは一番重要でないことが理想的です。最も重要なリソースが最初にスケジュールされるように、リソースの優先度が適切に設定されていることを確認してください。リソースの優先度の設定は、表6.3「リソースのメタオプション」 を参照してください。
9.6.5. NodeUtilization リソースエージェント (Red Hat Enterprise Linux 7.4 以降)
NodeUtilization リソースエージェントに対応しています。NodeUtilization エージェントは、使用可能な CPU、ホストメモリーの可用性、およびハイパーバイザーのメモリーの可用性に関するシステムパラメーターを検出し、このようなパラメーターを CIB に追加します。エージェントをクローンリソースとして実行して、各ノードにこのようなパラメーターを自動的に入力することができます。
NodeUtilization リソースエージェントと、このエージェントのリソースオプションの詳細は、pcs resource describe NodeUtilization コマンドを実行してください。
9.7. Pacemaker で管理されていないリソースの依存関係の起動順の設定 (Red Hat Enterprise Linux 7.4 以降)
systemd resource-agents-deps ターゲットを使用して、この状況に対応するように起動順序を設定できます。このターゲットに対して systemd ドロップインユニットを作成でき、Pacemaker はこのターゲットに対して相対的な順序を適切に設定します。
foo に依存するリソースが含まれている場合は、以下を含むドロップインユニット /etc/systemd/system/resource-agents-deps.target.d/foo.conf を作成できます。
[Unit] Requires=foo.service After=foo.service
/srv にファイルシステムをマウントする依存関係がある場合は、systemd のドキュメントに従って、systemd ファイル srv.mount を作成し、ここで説明しているように、foo . service の srv.mount を使用してドロップインユニットを作成し、ディスクがマウントされた後に Pacemaker が起動することを確認します。
9.8. SNMP での Pacemaker クラスターを照会 (Red Hat Enterprise Linux 7.5 以降)
pcs_snmp_agent デーモンを使用して、SNMP でデータについて Pacemaker クラスターを照会できます。pcs_snmp_agent デーモンは、agentx プロトコルを使用してマスターエージェント(snmpd)に接続する SNMP エージェントです。pcs_snmp_agent エージェントは、マスターエージェントにデータのみを提供するため、スタンドアロンエージェントとしては機能しません。
- クラスターの各ノードに
pcs-snmpパッケージをインストールします。これにより、snmpデーモンを提供するnet-snmpパッケージもインストールされます。#
yum install pcs-snmp /etc/snmp/snmpd.conf設定ファイルに以下の行を追加して、snmpdデーモンをmaster agentxとして設定します。master agentx
/etc/snmp/snmpd.conf設定ファイルに以下の行を追加して、同じ SNMP 設定でpcs_snmp_agentを有効にします。view systemview included .1.3.6.1.4.1.32723.100
pcs_snmp_agentサービスを開始します。#
systemctl start pcs_snmp_agent.service#systemctl enable pcs_snmp_agent.service- 設定を確認するには、pcs status でクラスターのステータスを表示し、SNMP からデータを取得して、出力に対応するかどうかを確認します。SNMP を使用してデータを取得する際には、プリミティブなリソースのみが与えられることに注意してください。以下の例は、アクションに 1 回失敗した実行中のクラスターでの pcs status コマンドの出力を示しています。
#
pcs statusCluster name: rhel75-cluster Stack: corosync Current DC: rhel75-node2 (version 1.1.18-5.el7-1a4ef7d180) - partition with quorum Last updated: Wed Nov 15 16:07:44 2017 Last change: Wed Nov 15 16:06:40 2017 by hacluster via cibadmin on rhel75-node1 2 nodes configured 14 resources configured (1 DISABLED) Online: [ rhel75-node1 rhel75-node2 ] Full list of resources: fencing (stonith:fence_xvm): Started rhel75-node1 dummy5 (ocf::pacemaker:Dummy): Stopped (disabled) dummy6 (ocf::pacemaker:Dummy): Stopped dummy7 (ocf::pacemaker:Dummy): Started rhel75-node2 dummy8 (ocf::pacemaker:Dummy): Started rhel75-node1 dummy9 (ocf::pacemaker:Dummy): Started rhel75-node2 Resource Group: group1 dummy1 (ocf::pacemaker:Dummy): Started rhel75-node1 dummy10 (ocf::pacemaker:Dummy): Started rhel75-node1 Clone Set: group2-clone [group2] Started: [ rhel75-node1 rhel75-node2 ] Clone Set: dummy4-clone [dummy4] Started: [ rhel75-node1 rhel75-node2 ] Failed Actions: * dummy6_start_0 on rhel75-node1 'unknown error' (1): call=87, status=complete, exitreason='', last-rc-change='Wed Nov 15 16:05:55 2017', queued=0ms, exec=20ms#
snmpwalk -v 2c -c public localhost PACEMAKER-PCS-V1-MIB::pcmkPcsV1ClusterPACEMAKER-PCS-V1-MIB::pcmkPcsV1ClusterName.0 = STRING: "rhel75-cluster" PACEMAKER-PCS-V1-MIB::pcmkPcsV1ClusterQuorate.0 = INTEGER: 1 PACEMAKER-PCS-V1-MIB::pcmkPcsV1ClusterNodesNum.0 = INTEGER: 2 PACEMAKER-PCS-V1-MIB::pcmkPcsV1ClusterNodesNames.0 = STRING: "rhel75-node1" PACEMAKER-PCS-V1-MIB::pcmkPcsV1ClusterNodesNames.1 = STRING: "rhel75-node2" PACEMAKER-PCS-V1-MIB::pcmkPcsV1ClusterCorosyncNodesOnlineNum.0 = INTEGER: 2 PACEMAKER-PCS-V1-MIB::pcmkPcsV1ClusterCorosyncNodesOnlineNames.0 = STRING: "rhel75-node1" PACEMAKER-PCS-V1-MIB::pcmkPcsV1ClusterCorosyncNodesOnlineNames.1 = STRING: "rhel75-node2" PACEMAKER-PCS-V1-MIB::pcmkPcsV1ClusterCorosyncNodesOfflineNum.0 = INTEGER: 0 PACEMAKER-PCS-V1-MIB::pcmkPcsV1ClusterPcmkNodesOnlineNum.0 = INTEGER: 2 PACEMAKER-PCS-V1-MIB::pcmkPcsV1ClusterPcmkNodesOnlineNames.0 = STRING: "rhel75-node1" PACEMAKER-PCS-V1-MIB::pcmkPcsV1ClusterPcmkNodesOnlineNames.1 = STRING: "rhel75-node2" PACEMAKER-PCS-V1-MIB::pcmkPcsV1ClusterPcmkNodesStandbyNum.0 = INTEGER: 0 PACEMAKER-PCS-V1-MIB::pcmkPcsV1ClusterPcmkNodesOfflineNum.0 = INTEGER: 0 PACEMAKER-PCS-V1-MIB::pcmkPcsV1ClusterAllResourcesNum.0 = INTEGER: 11 PACEMAKER-PCS-V1-MIB::pcmkPcsV1ClusterAllResourcesIds.0 = STRING: "fencing" PACEMAKER-PCS-V1-MIB::pcmkPcsV1ClusterAllResourcesIds.1 = STRING: "dummy5" PACEMAKER-PCS-V1-MIB::pcmkPcsV1ClusterAllResourcesIds.2 = STRING: "dummy6" PACEMAKER-PCS-V1-MIB::pcmkPcsV1ClusterAllResourcesIds.3 = STRING: "dummy7" PACEMAKER-PCS-V1-MIB::pcmkPcsV1ClusterAllResourcesIds.4 = STRING: "dummy8" PACEMAKER-PCS-V1-MIB::pcmkPcsV1ClusterAllResourcesIds.5 = STRING: "dummy9" PACEMAKER-PCS-V1-MIB::pcmkPcsV1ClusterAllResourcesIds.6 = STRING: "dummy1" PACEMAKER-PCS-V1-MIB::pcmkPcsV1ClusterAllResourcesIds.7 = STRING: "dummy10" PACEMAKER-PCS-V1-MIB::pcmkPcsV1ClusterAllResourcesIds.8 = STRING: "dummy2" PACEMAKER-PCS-V1-MIB::pcmkPcsV1ClusterAllResourcesIds.9 = STRING: "dummy3" PACEMAKER-PCS-V1-MIB::pcmkPcsV1ClusterAllResourcesIds.10 = STRING: "dummy4" PACEMAKER-PCS-V1-MIB::pcmkPcsV1ClusterRunningResourcesNum.0 = INTEGER: 9 PACEMAKER-PCS-V1-MIB::pcmkPcsV1ClusterRunningResourcesIds.0 = STRING: "fencing" PACEMAKER-PCS-V1-MIB::pcmkPcsV1ClusterRunningResourcesIds.1 = STRING: "dummy7" PACEMAKER-PCS-V1-MIB::pcmkPcsV1ClusterRunningResourcesIds.2 = STRING: "dummy8" PACEMAKER-PCS-V1-MIB::pcmkPcsV1ClusterRunningResourcesIds.3 = STRING: "dummy9" PACEMAKER-PCS-V1-MIB::pcmkPcsV1ClusterRunningResourcesIds.4 = STRING: "dummy1" PACEMAKER-PCS-V1-MIB::pcmkPcsV1ClusterRunningResourcesIds.5 = STRING: "dummy10" PACEMAKER-PCS-V1-MIB::pcmkPcsV1ClusterRunningResourcesIds.6 = STRING: "dummy2" PACEMAKER-PCS-V1-MIB::pcmkPcsV1ClusterRunningResourcesIds.7 = STRING: "dummy3" PACEMAKER-PCS-V1-MIB::pcmkPcsV1ClusterRunningResourcesIds.8 = STRING: "dummy4" PACEMAKER-PCS-V1-MIB::pcmkPcsV1ClusterStoppedResroucesNum.0 = INTEGER: 1 PACEMAKER-PCS-V1-MIB::pcmkPcsV1ClusterStoppedResroucesIds.0 = STRING: "dummy5" PACEMAKER-PCS-V1-MIB::pcmkPcsV1ClusterFailedResourcesNum.0 = INTEGER: 1 PACEMAKER-PCS-V1-MIB::pcmkPcsV1ClusterFailedResourcesIds.0 = STRING: "dummy6" PACEMAKER-PCS-V1-MIB::pcmkPcsV1ClusterFailedResourcesIds.0 = No more variables left in this MIB View (It is past the end of the MIB tree)
9.9. クリーンノードのシャットダウンで停止するようにリソースを設定 (Red Hat Enterprise Linux 7.8 以降)
9.9.1. クリーンノードシャットダウンで停止するようにリソースを設定するためのクラスタープロパティー
- shutdown-lock
- このクラスタープロパティーをデフォルト値の
falseに設定すると、クラスターは、ノードで正常にシャットダウンされているノードでアクティブなリソースを復旧します。このプロパティーをtrueに設定すると、適切にシャットダウンしているノードでアクティブなリソースは、クラスターに再参加した後にノードで再起動するまで別の場所で起動できません。shutdown-lockプロパティーはクラスターノードまたはリモートノードのいずれかで機能しますが、ゲストノードでは機能しません。shutdown-lockをtrueに設定すると、ノードがダウンしたときに 1 つのクラスターリソースのロックを削除し、次のコマンドを使用してノードで手動更新を実行してリソースを別の場所で起動できるようになります。pcs resource refresh resource --node node
リソースのロックが解除されると、クラスターはリソースを別の場所に移動できるようになることに注意してください。リソースのスティッキネスの値または場所の設定を使用することにより、これが発生する可能性を抑制できます。注記手動更新は、最初に次のコマンドを実行するとリモートノードで機能します。- リモートノードで systemctl stop pacemaker_remote コマンドを実行してノードを停止します。
- pcs resource disable remote-connection-resource コマンドを実行します。
その後、リモートノードで手動更新を実行できます。 - shutdown-lock-limit
- このクラスタープロパティーをデフォルト値の 0 以外の値に設定すると、シャットダウンを開始してから指定した時間内にノードが再参加しない場合に、他のノードの復旧にリソースが利用可能になります。ただし、この間隔は cluster
-recheck-interval クラスタープロパティーの値よりも頻繁にチェックされないことに注意してください。注記shutdown-lock-limitプロパティーは、以下のコマンドを最初に実行した場合に限りリモートノードで動作します。- リモートノードで systemctl stop pacemaker_remote コマンドを実行してノードを停止します。
- pcs resource disable remote-connection-resource コマンドを実行します。
このコマンドを実行すると、shutdown-lock-limitで指定した時間が経過すると、リモートノード上で実行しているリソースが他のノードの復旧に利用できます。
9.9.2. shutdown-lock クラスタープロパティーの設定
shutdown-lock クラスタープロパティーを true に設定し、ノードをシャットダウンして再起動したときの影響を示しています。この例のクラスターは、z1.example.com、z2.example.com、および z3.example.com の 3 つのノードで設定されます。
shutdown-lockプロパティーをtrueに設定し、その値を確認します。この例では、shutdown-lock-limitプロパティーはデフォルト値の 0 を維持します。[root@z3.example.com ~]#
pcs property set shutdown-lock=true[root@z3.example.com ~]#pcs property list --all | grep shutdown-lockshutdown-lock: true shutdown-lock-limit: 0- クラスターのステータスを確認します。この例では、3 番
目と5 番目のリソースがz1.example.comで実行しています。[root@z3.example.com ~]#
pcs status... Full List of Resources: ... * first (ocf::pacemaker:Dummy): Started z3.example.com * second (ocf::pacemaker:Dummy): Started z2.example.com * third (ocf::pacemaker:Dummy): Started z1.example.com * fourth (ocf::pacemaker:Dummy): Started z2.example.com * fifth (ocf::pacemaker:Dummy): Started z1.example.com ... z1.example.comをシャットダウンします。これにより、そのノードで実行されているリソースを停止します。[root@z3.example.com ~] #
pcs cluster stop z1.example.comStopping Cluster (pacemaker)... Stopping Cluster (corosync)...pcs status コマンドを実行すると、ノードz1.example.comがオフラインで、z1.example.comで実行していたリソースがノードの停止時にLOCKEDであることを示しています。[root@z3.example.com ~]#
pcs status... Node List: * Online: [ z2.example.com z3.example.com ] * OFFLINE: [ z1.example.com ] Full List of Resources: ... * first (ocf::pacemaker:Dummy): Started z3.example.com * second (ocf::pacemaker:Dummy): Started z2.example.com * third (ocf::pacemaker:Dummy): Stopped z1.example.com (LOCKED) * fourth (ocf::pacemaker:Dummy): Started z3.example.com * fifth (ocf::pacemaker:Dummy): Stopped z1.example.com (LOCKED) ...- クラスターサービスを
z1.example.comで再度起動し、クラスターに再参加できるようにします。ロックされたリソースは、そのノードで開始する必要がありますが、いったん起動すると、必ずしも同じノードに留まるわけではありません。[root@z3.example.com ~]#
pcs cluster start z1.example.comStarting Cluster...この例では、3 番目と 5 番目のリソースが z1.example.com ノードで復元されます。[root@z3.example.com ~]#
pcs status... Node List: * Online: [ z1.example.com z2.example.com z3.example.com ] Full List of Resources: .. * first (ocf::pacemaker:Dummy): Started z3.example.com * second (ocf::pacemaker:Dummy): Started z2.example.com * third (ocf::pacemaker:Dummy): Started z1.example.com * fourth (ocf::pacemaker:Dummy): Started z3.example.com * fifth (ocf::pacemaker:Dummy): Started z1.example.com ...
第10章 クラスタークォーラム
votequorum サービスをフェンシングと併用します。クラスターの各システムには多くの投票数が割り当てられ、過半数の票を取得しているものだけがクラスターの操作を継続できます。サービスは、すべてのノードに読み込むか、いずれのノードにも読み込まないようにする必要があります。サービスをクラスターノードのサブセットに読み込むと、結果が予想できなくなります。votequorumサービスの設定および操作の詳細は、votequorum (5)の man ページを参照してください。
10.1. クォーラムオプションの設定
表10.1 クォーラムオプション
| オプション | 説明 |
|---|---|
--auto_tie_breaker |
これを有効にすると、クラスターは、決定論的に最大 50% のノードが同時に失敗しても存続されます。クラスターパーティション、または
auto_tie_breaker_node で設定された nodeid (設定されていない場合は最小の nodeid )と通信しているノードのセットはクォーラムのままになります。その他のノードはクォーラムに達しません。
auto_tie_breaker オプションを指定すると、均等の分割でクラスターが動作を継続できるようになるため、主に偶数個のノードがあるクラスターで使用されます。複数で不均等の分割などの、より複雑な障害は、「クォーラムデバイス」 で説明されているようにクォーラムデバイスを使用することが推奨されます。auto_tie_breaker オプションは、クォーラムデバイスと互換性がありません。
|
--wait_for_all |
有効にすると、最低 1 回、同時にすべてのノードが現れた後に、初回だけ、クラスターがクォーラムに達します。
wait_for_all オプションは、主にクォーラムデバイス lms (last man standing)アルゴリズムを使用する 2 ノードクラスターおよび偶ノードクラスターに使用されます。
wait_for_all オプションは、クラスターに 2 つのノードがあり、クォーラムデバイスを使用せず、auto_tie_breaker が無効になっている場合に自動的に有効になります。wait_for_all を明示的に 0 に設定すると、このオプションをオーバーライドできます。
|
--last_man_standing | 有効にすると、クラスターは特定の状況で expected_votes およびクォーラムを動的に再計算できます。このオプションを有効にする場合は、wait_for_all を有効にする必要があります。last_man_standing オプションには、クォーラムデバイスとの互換性がありません。 |
--last_man_standing_window | クラスターがノードを失うと、expected_votes およびクォーラムを再計算するまで待機する時間(ミリ秒単位)。 |
10.2. クォーラム管理コマンド (Red Hat Enterprise Linux 7.3 以降)
pcs quorum [config]
pcs quorum status
expected_votes パラメーターの値を変更できます。これにより、クォーラムがない場合でも、クラスターは操作を継続できます。
wait_for_all パラメーターが有効になっていることを確認する必要があります。
expected_votes の値は設定ファイルの値にリセットされます。
pcs quorum expected-votes votes
10.3. クォーラムオプションの変更 (Red Hat Enterprise Linux 7.3 以降)
pcs quorum update [auto_tie_breaker=[0|1]] [last_man_standing=[0|1]] [last_man_standing_window=[time-in-ms] [wait_for_all=[0|1]]
wait_for_all クォーラムオプションを変更し、オプションの更新済みステータスを表示します。クラスターの稼働中はこのコマンドを実行できないことに注意してください。
[root@node1:~]#pcs quorum update wait_for_all=1Checking corosync is not running on nodes... Error: node1: corosync is running Error: node2: corosync is running [root@node1:~]#pcs cluster stop --allnode2: Stopping Cluster (pacemaker)... node1: Stopping Cluster (pacemaker)... node1: Stopping Cluster (corosync)... node2: Stopping Cluster (corosync)... [root@node1:~]#pcs quorum update wait_for_all=1Checking corosync is not running on nodes... node2: corosync is not running node1: corosync is not running Sending updated corosync.conf to nodes... node1: Succeeded node2: Succeeded [root@node1:~]#pcs quorum configOptions: wait_for_all: 1
10.4. クォーラムアンブロック (quorum unblock) コマンド
# pcs cluster quorum unblock10.5. クォーラムデバイス
- クォーラムデバイスは、クォーラムデバイスを使用するクラスターと同じ場所にある別の物理ネットワークで実行することが推奨されます。理想としては、クォーラムデバイスホストを、メインクラスターとは別のラックに置くか、少なくとも別の PSU に置くようにします。corosync リングと同じネットワークセグメントには置かないようにしてください。
- 複数のクォーラムデバイスをクラスターで同時に使用することはできません。
- 複数のクォーラムデバイスをクラスターで同時に使用することはできません。ただし、複数のクラスターが 1 つのクォーラムデバイスを同時に使用することはできます。アルゴリズムやクォーラムオプションはクラスターノード自体に保存されるため、同じクォーラムデバイスを使用する各クラスターが、複数のアルゴリズムやクォーラムオプションを使用できます。たとえば、単一のクォーラムデバイスは、
ffsplit(fifty/fifty 分割)アルゴリズムを持つ 1 つのクラスター、およびレム(last man standing)アルゴリズムを持つ 2 番目のクラスターで使用できます。 - クォーラムデバイスは、既存のクラスターノードで実行しないでください。
10.5.1. クォーラムデバイスパッケージのインストール
- 既存クラスターのノードに
corosync-qdeviceをインストールします。[root@node1:~]#
yum install corosync-qdevice[root@node2:~]#yum install corosync-qdevice - クォーラムデバイスホストに
pcsおよびcorosync-qnetdをインストールします。[root@qdevice:~]#
yum install pcs corosync-qnetd pcsdサービスを起動し、システムの起動時にpcsdがクォーラムデバイスホストで有効にします。[root@qdevice:~]#
systemctl start pcsd.service[root@qdevice:~]#systemctl enable pcsd.service
10.5.2. クォーラムデバイスの設定
- クォーラムデバイスに使用されるノードは
qdeviceです。 - クォーラムデバイスモデルは
netで、現在サポートされている唯一のモデルです。netモデルは、以下のアルゴリズムに対応します。ffsplit: fifty-fifty 分割。これにより、アクティブなノードの数が最も多いパーティションに 1 票が提供されます。ldM: last-man-standing。ノードがqnetdサーバーを表示できるクラスター内に残っている唯一のノードである場合、投票を返します。警告LMS アルゴリズムにより、ノードが 1 つしか残っていなくてもクラスターはクォーラムを維持できますが、number_of_nodes - 1 と同じであるため、クォーラムデバイスの投票力が大きいことを意味します。クォーラムデバイスとの接続が失われると、number_of_nodes - 1 の票が失われます。つまり、(クォーラムデバイスを無効にすることで) すべてのノードがアクティブなクラスターのみがクォーラムに達したままになります。他のクラスターは、クォーラムに達しなくなります。
これらのアルゴリズムの実装の詳細は、corosync-qdevice(8)の man ページを参照してください。 - クラスターノードは
node1およびnode2です。
- クォーラムデバイスをホストするために使用するノードで以下のコマンドを使用し、クォーラムデバイスを設定します。このコマンドは、クォーラムデバイスモデル
netを設定および開始し、システムの起動時にデバイスが開始するように設定します。[root@qdevice:~]#
pcs qdevice setup model net --enable --startQuorum device 'net' initialized quorum device enabled Starting quorum device... quorum device startedクォーラムデバイスの設定後、そのステータスを確認できます。corosync-qnetdデーモンが実行中で、この時点でクライアントが接続されていないことが分かります。--fullコマンドオプションを指定すると詳細が出力されます。[root@qdevice:~]#
pcs qdevice status net --fullQNetd address: *:5403 TLS: Supported (client certificate required) Connected clients: 0 Connected clusters: 0 Maximum send/receive size: 32768/32768 bytes - 以下のコマンドを実行して、
firewalldでhigh-availabilityサービスを有効にして、pcsdデーモンおよびnetクォーラムデバイスに必要なファイアウォールのポートを有効にします。[root@qdevice:~]#
firewall-cmd --permanent --add-service=high-availability[root@qdevice:~]#firewall-cmd --add-service=high-availability - 既存クラスター内のノードのいずれかから、クォーラムデバイスをホストしているノードで
haclusterユーザーを認証します。[root@node1:~] #
pcs cluster auth qdeviceUsername: hacluster Password: qdevice: Authorized - クォーラムデバイスをクラスターに追加します。クォーラムデバイスを追加する前に、後で比較するために、クォーラムデバイスの現在の設定と状況を確認できます。このコマンドの出力は、クラスターがクォーラムデバイスを使用していないことを示しています。
[root@node1:~]#
pcs quorum configOptions:[root@node1:~]#
pcs quorum statusQuorum information ------------------ Date: Wed Jun 29 13:15:36 2016 Quorum provider: corosync_votequorum Nodes: 2 Node ID: 1 Ring ID: 1/8272 Quorate: Yes Votequorum information ---------------------- Expected votes: 2 Highest expected: 2 Total votes: 2 Quorum: 1 Flags: 2Node Quorate Membership information ---------------------- Nodeid Votes Qdevice Name 1 1 NR node1 (local) 2 1 NR node2以下のコマンドは、作成しておいたクォーラムデバイスをクラスターに追加します。複数のクォーラムデバイスをクラスターで同時に使用することはできません。ただし、複数のクラスターが 1 つのクォーラムデバイスを同時に使用することはできます。上記のコマンド例は、ffsplitアルゴリズムを使用するようにクォーラムデバイスを設定します。クォーラムデバイスの設定オプションの詳細は、corosync-qdevice(8)の man ページを参照してください。[root@node1:~]#
pcs quorum device add model net host=qdevice algorithm=ffsplitSetting up qdevice certificates on nodes... node2: Succeeded node1: Succeeded Enabling corosync-qdevice... node1: corosync-qdevice enabled node2: corosync-qdevice enabled Sending updated corosync.conf to nodes... node1: Succeeded node2: Succeeded Corosync configuration reloaded Starting corosync-qdevice... node1: corosync-qdevice started node2: corosync-qdevice started - クォーラムデバイスの設定状態をチェックします。クラスター側から以下のコマンドを実行すると、設定の変更内容を確認できます。pcs quorum config は、設定されたクォーラムデバイスを表示します。
[root@node1:~]#
pcs quorum configOptions: Device: Model: net algorithm: ffsplit host: qdevicepcs quorum status コマンドは、クォーラムデバイスのステータスを表示し、クォーラムデバイスが使用中であることを示します。[root@node1:~]#
pcs quorum statusQuorum information ------------------ Date: Wed Jun 29 13:17:02 2016 Quorum provider: corosync_votequorum Nodes: 2 Node ID: 1 Ring ID: 1/8272 Quorate: Yes Votequorum information ---------------------- Expected votes: 3 Highest expected: 3 Total votes: 3 Quorum: 2 Flags: Quorate Qdevice Membership information ---------------------- Nodeid Votes Qdevice Name 1 1 A,V,NMW node1 (local) 2 1 A,V,NMW node2 0 1 Qdevicepcs quorum device status には、クォーラムデバイスのランタイムステータスが表示されます。[root@node1:~]#
pcs quorum device statusQdevice information ------------------- Model: Net Node ID: 1 Configured node list: 0 Node ID = 1 1 Node ID = 2 Membership node list: 1, 2 Qdevice-net information ---------------------- Cluster name: mycluster QNetd host: qdevice:5403 Algorithm: ffsplit Tie-breaker: Node with lowest node ID State: Connectedクォーラムデバイスから以下の status コマンドを実行すると、corosync-qnetdデーモンのステータスを表示できます。[root@qdevice:~]#
pcs qdevice status net --fullQNetd address: *:5403 TLS: Supported (client certificate required) Connected clients: 2 Connected clusters: 1 Maximum send/receive size: 32768/32768 bytes Cluster "mycluster": Algorithm: ffsplit Tie-breaker: Node with lowest node ID Node ID 2: Client address: ::ffff:192.168.122.122:50028 HB interval: 8000ms Configured node list: 1, 2 Ring ID: 1.2050 Membership node list: 1, 2 TLS active: Yes (client certificate verified) Vote: ACK (ACK) Node ID 1: Client address: ::ffff:192.168.122.121:48786 HB interval: 8000ms Configured node list: 1, 2 Ring ID: 1.2050 Membership node list: 1, 2 TLS active: Yes (client certificate verified) Vote: ACK (ACK)
10.5.3. クォーラムデバイスサービスの管理
corosync-qnetd サービスにのみ影響することに注意してください。
[root@qdevice:~]#pcs qdevice start net[root@qdevice:~]#pcs qdevice stop net[root@qdevice:~]#pcs qdevice enable net[root@qdevice:~]#pcs qdevice disable net[root@qdevice:~]#pcs qdevice kill net
10.5.4. クラスターでのクォーラムデバイス設定の管理
10.5.4.1. クォーラムデバイス設定の変更
net の ホスト オプションを変更するには、旧ホストと新しいホストが同じマシンでない限り、pcs quorum device remove コマンドおよび pcs quorum device add コマンドを使用して設定を正しく設定します。
lms に変更します。
[root@node1:~]# pcs quorum device update model algorithm=lms
Sending updated corosync.conf to nodes...
node1: Succeeded
node2: Succeeded
Corosync configuration reloaded
Reloading qdevice configuration on nodes...
node1: corosync-qdevice stopped
node2: corosync-qdevice stopped
node1: corosync-qdevice started
node2: corosync-qdevice started
10.5.4.2. クォーラムデバイスの削除
[root@node1:~]# pcs quorum device remove
Sending updated corosync.conf to nodes...
node1: Succeeded
node2: Succeeded
Corosync configuration reloaded
Disabling corosync-qdevice...
node1: corosync-qdevice disabled
node2: corosync-qdevice disabled
Stopping corosync-qdevice...
node1: corosync-qdevice stopped
node2: corosync-qdevice stopped
Removing qdevice certificates from nodes...
node1: Succeeded
node2: Succeeded
[root@node1:~]# pcs quorum device status
Error: Unable to get quorum status: corosync-qdevice-tool: Can't connect to QDevice socket (is QDevice running?): No such file or directory
10.5.4.3. クォーラムデバイスの破棄
[root@qdevice:~]# pcs qdevice destroy net
Stopping quorum device...
quorum device stopped
quorum device disabled
Quorum device 'net' configuration files removed
第11章 Pacemaker ルール
boolean-op フィールドに基づいて組み合わされ、最終的にルールが true または false に評価されるかどうかを判断します。次の動作は、ルールが使用される状況に応じて異なります。
表11.1 ルールのプロパティー
| フィールド | 説明 |
|---|---|
role
| |
score
| |
score-attribute
| |
boolean-op
|
11.1. ノード属性の式
表11.2 式のプロパティー
| フィールド | 説明 |
|---|---|
attribute
| |
type
| |
operation
|
実行する比較動作。設定できる値は以下のとおりです。
*
lt - ノード属性の値が 値よりも小さい場合は True
*
gt - ノード属性の値が 値よりも大きい場合は True
* LTE - ノード属性の値が値以下である場合に True
* gE - ノード属性の値が値より大きい場合は True
*
eq - ノード属性の値が値と等しい場合は True
*
ne - ノード属性の値が値と等しくない場合は True
*
defined - ノードが名前付き属性を持っている場合は True
|
value
|
表11.3 組み込みノード属性
| 名前 | 説明 |
|---|---|
#uname
|
ノード名
|
#id
|
ノード ID
|
#kind
|
ノードタイプ。使用できる値は、
cluster、remote、および container です。kind の値は remote です。ocf:pacemaker:remote リソースで作成された Pacemaker リモートノードの場合は、Pacemaker リモートゲストノードおよびバンドルノードの コンテナー です。
|
#is_dc
|
このノードが指定コントローラー(DC)の場合は
true、そうでない場合は false
|
#cluster_name
|
cluster
-name クラスター プロパティーの値(設定されている場合)。
|
#site_name
| site-name ノード属性の値(設定されている場合)。それ以外は #cluster-nameと同じ。
|
#role
|
関連する多状態リソースがこのノードで果たすロール。多状態リソースの場所の制約のルール内でのみ有効です。
|
11.2. 時刻と日付ベースの式
表11.4 日付の式のプロパティー
11.3. 日付の詳細
monthdays="1 " は毎月の最初の日と一致し、hour ="09-17" は 9 am から 5 pm (inclusive)までの時間に一致します。ただし、weekdays="1,2 " または weekdays="1-2, 5-6" は、複数の範囲 が含まれるため、指定できません。
表11.5 日付詳細のプロパティー
| フィールド | 説明 |
|---|---|
id
| |
hours
| |
monthdays
| |
weekdays
| |
yeardays
| |
months
| |
weeks
| |
years
| |
weekyears
| |
moon
|
11.4. 期間
end の値を計算するために使用されます。これには date_spec オブジェクトと同じフィールドが含まれていますが、制限はありません(つまり、19 カ月間を指定できます)。date_specs と同様に、指定されていないフィールドは無視されます。
11.5. pcs でのルールの設定
pcs constraint rule remove rule_id
第12章 Pacemaker クラスターのプロパティー
- 表12.1「クラスターのプロパティー」 では、クラスターのプロパティーオプションを説明します。
- 「クラスターのプロパティーの設定と削除」 では、クラスタープロパティーの設定方法を説明します。
- 「クラスタープロパティー設定のクエリー」 では、現在設定されているクラスタープロパティーを一覧表示する方法を説明しています。
12.1. クラスタープロパティーとオプションの要約
表12.1 クラスターのプロパティー
| オプション | デフォルト | 説明 |
|---|---|---|
batch-limit | 0 | |
migration-limit | -1 (無制限) | |
no-quorum-policy | stop |
* ignore - 全リソースの管理を続行する
* freeze - リソース管理は継続するが、影響を受けるパーティションに含まれないノードのリソースは復帰させない
* stop - 影響を受けるクラスターパーティション内の全リソースを停止する
* suicide - 影響を受けるクラスターパーティション内の全ノードをフェンスする
|
symmetric-cluster | true | |
stonith-enabled | true |
true、または未設定の場合は、1 つ以上の STONITH リソースが設定されていない限り、リソースの開始を拒否します。
|
stonith-action | reboot | |
cluster-delay | 60s | |
stop-orphan-resources | true | |
stop-orphan-actions | true | |
start-failure-is-fatal | true |
特定のノードでリソースの起動に失敗した場合に、そのノードで開始試行を行わないようにするかを示します。
false に設定すると、クラスターは、リソースの現在の失敗数と移行しきい値に基づいて、同じノードで開始を再試行するかどうかを決定します。リソースの migration-threshold オプションの設定に関する詳細は、「障害発生によるリソースの移動」 を参照してください。
start-failure-is-fatal を false に設定すると、リソースを起動できない障害のあるノードが、すべての依存アクションを保持できるというリスクが発生します。これが、start-failure-is-fatal のデフォルトは true であるためです。start-failure-is-fatal=false を設定するリスクは、移行しきい値を低く設定すると軽減できます。これにより、多くの障害の後に他のアクションを続行できます。
|
pe-error-series-max | -1 (すべて) | |
pe-warn-series-max | -1 (すべて) | |
pe-input-series-max | -1 (すべて) | |
cluster-infrastructure | ||
dc-version | ||
last-lrm-refresh | ||
cluster-recheck-interval | 15 分 | |
maintenance-mode | false | |
shutdown-escalation | 20min | |
stonith-timeout | 60s | |
stop-all-resources | false | |
enable-acl | false | |
placement-strategy | default |
クラスターノードでリソースの配置を決定する際に、クラスターが使用率属性を考慮にいれるかどうかと、どのように考慮するかを示します。使用率属性および配置ストラテジーの詳細は、「使用と配置ストラテジー」 を参照してください。
|
fence-reaction | stop |
12.2. クラスターのプロパティーの設定と削除
pcs property set property=value
symmetric-cluster の値を false に設定するには、次のコマンドを使用します。
# pcs property set symmetric-cluster=falsepcs property unset property
symmetric-cluster プロパティーを false に設定している場合、以下のコマンドは設定から設定した値を削除し、symmetric-cluster の値をデフォルト値の true に戻します。
# pcs property set symmetic-cluster=12.3. クラスタープロパティー設定のクエリー
pcs property list
pcs property list --all
pcs property show property
cluster-infrastructure プロパティーの現在の値を表示するには、以下のコマンドを実行します。
# pcs property show cluster-infrastructure
Cluster Properties:
cluster-infrastructure: cman
pcs property [list|show] --defaults
第13章 クラスターイベントのスクリプトのトリガー
- Red Hat Enterprise Linux 7.3 より、アラートエージェントを使用して Pacemaker アラートを設定できるようになりました。アラートエージェントは、リソース設定と操作を処理するためにクラスター呼び出しのリソースエージェントと同様にクラスターが呼び出す外部プログラムです。Pacemaker アラートエージェントの説明は 「Pacemaker アラートエージェント (Red Hat Enterprise Linux 7.3 以降)」 を参照してください。
ocf:pacemaker:ClusterMonリソースはクラスターのステータスを監視し、各クラスターイベントでアラートをトリガーできます。このリソースは、crm_mon コマンドを一定間隔でバックグラウンドで実行します。ClusterMonリソースの詳細は 「モニタリングのリソースを使ったイベント通知」 を参照してください。
13.1. Pacemaker アラートエージェント (Red Hat Enterprise Linux 7.3 以降)
- Pacemaker は、デフォルトで
/usr/share/pacemaker/alertsにインストールされるアラートエージェントのサンプルを複数提供します。これらのサンプルスクリプトは、コピーしてそのまま使用したり、目的に合わせて編集するテンプレートとして使用することもできます。対応する全属性は、サンプルエージェントのソースコードを参照してください。サンプルアラートエージェントを使用するアラートの基本的な設定手順の例は、「サンプルアラートエージェントの使用」 を参照してください。 - アラートエージェントの設定および管理に関する一般的な情報は、「アラートの作成」、「アラートの表示、編集、および削除」、「アラートの受信側」、「アラートメタオプション」、および 「アラート設定コマンドの例」 を参照してください。
- Pacemaker アラートの独自のアラートエージェントを作成することができます。アラートエージェントの作成に関する詳細は、「アラートエージェントの作成」 を参照してください。
13.1.1. サンプルアラートエージェントの使用
alert_file.sh.sample スクリプトを alert_file.sh としてインストールします。
# install --mode=0755 /usr/share/pacemaker/alerts/alert_file.sh.sample /var/lib/pacemaker/alert_file.shalert_file.sh アラートエージェントを使用してイベントをファイルに記録するアラートを設定します。アラートエージェントは、最低限のパーミッションを持つ hacluster ユーザーとして実行します。
pcmk_alert_file.log を作成します。また、アラートエージェントを作成し、その受信先としてログファイルへのパスを追加します。
#touch /var/log/pcmk_alert_file.log#chown hacluster:haclient /var/log/pcmk_alert_file.log#chmod 600 /var/log/pcmk_alert_file.log#pcs alert create id=alert_file description="Log events to a file." path=/var/lib/pacemaker/alert_file.sh#pcs alert recipient add alert_file id=my-alert_logfile value=/var/log/pcmk_alert_file.log
alert_snmp.sh.sample スクリプトを alert_snmp.sh としてインストールし、インストールされた alert_snmp.sh アラートエージェントを使用してクラスターイベントを SNMP トラップとして送信するアラートを設定します。デフォルトでは、正常な監視呼び出し以外のすべてのイベントを SNMP サーバーに送信します。この例では、タイムスタンプの形式をメタオプションとして設定します。メタオプションの詳細は、「アラートメタオプション」 を参照してください。この例では、アラートの設定後にアラートの受信側が設定され、アラート設定が表示されます。
#install --mode=0755 /usr/share/pacemaker/alerts/alert_snmp.sh.sample /var/lib/pacemaker/alert_snmp.sh#pcs alert create id=snmp_alert path=/var/lib/pacemaker/alert_snmp.sh meta timestamp-format="%Y-%m-%d,%H:%M:%S.%01N"#pcs alert recipient add snmp_alert value=192.168.1.2#pcs alertAlerts: Alert: snmp_alert (path=/var/lib/pacemaker/alert_snmp.sh) Meta options: timestamp-format=%Y-%m-%d,%H:%M:%S.%01N. Recipients: Recipient: snmp_alert-recipient (value=192.168.1.2)
alert_smtp.sh エージェントをインストールし、インストールされたアラートエージェントを使用するアラートを設定して、クラスターイベントを電子メールメッセージとして送信します。この例では、アラートの設定後に受信側が設定され、アラート設定が表示されます。
#install --mode=0755 /usr/share/pacemaker/alerts/alert_smtp.sh.sample /var/lib/pacemaker/alert_smtp.sh#pcs alert create id=smtp_alert path=/var/lib/pacemaker/alert_smtp.sh options email_sender=donotreply@example.com#pcs alert recipient add smtp_alert value=admin@example.com#pcs alertAlerts: Alert: smtp_alert (path=/var/lib/pacemaker/alert_smtp.sh) Options: email_sender=donotreply@example.com Recipients: Recipient: smtp_alert-recipient (value=admin@example.com)
13.1.2. アラートの作成
id の値を指定しないと、値が生成されます。アラートメタオプションの詳細は、「アラートメタオプション」 を参照してください。
pcs alert create path=path [id=alert-id] [description=description] [options [option=value]...] [meta [meta-option=value]...]
myscript.sh を呼び出す簡単なアラートを作成します。
# pcs alert create id=my_alert path=/path/to/myscript.sh13.1.3. アラートの表示、編集、および削除
pcs alert [config|show]
pcs alert update alert-id [path=path] [description=description] [options [option=value]...] [meta [meta-option=value]...]
pcs alert remove alert-id
13.1.4. アラートの受信側
pcs alert recipient add alert-id value=recipient-value [id=recipient-id] [description=description] [options [option=value]...] [meta [meta-option=value]...]
pcs alert recipient update recipient-id [value=recipient-value] [description=description] [options [option=value]...] [meta [meta-option=value]...]
pcs alert recipient remove recipient-id
my-recipient-id のアラート受信側 my-alert-recipient をアラート my-alert に追加します。これにより、各イベントの my-alert 用に設定されたアラートスクリプトを呼び出すようにクラスターが設定され、受信者 some-address が環境変数として渡されます。
# pcs alert recipient add my-alert value=my-alert-recipient id=my-recipient-id options value=some-address13.1.5. アラートメタオプション
表13.1 アラートメタオプション
| メタ属性 | デフォルト | 説明 |
|---|---|---|
timestamp-format
|
%H:%M:%S.%06N
|
イベントのタイムスタンプをエージェントに送信するときにクラスターが使用する形式です。
date(1)コマンドで使用される文字列です。
|
timeout
|
30s
|
アラートエージェントがこの時間内に完了しないと終了させられます。
|
myscript.sh スクリプトを呼び出すアラートを設定し、2 つの受信側をアラートに追加します。最初の受信側には、ID が my-alert-recipient1 で、2 番目の受信側の ID は my-alert-recipient2 になります。スクリプトは各イベントで 2 回呼び出され、呼び出しのタイムアウト値はそれぞれ 15 秒です。1 つの呼び出しは受信者 someuser@example.com に渡され、タイムスタンプの形式は %D %H:%M になります。もう 1 つの呼び出しは受信者 otheruser@example.com に渡され、タイムスタンプの形式は %c になります。
#pcs alert create id=my-alert path=/path/to/myscript.sh meta timeout=15s#pcs alert recipient add my-alert value=someuser@example.com id=my-alert-recipient1 meta timestamp-format="%D %H:%M"#pcs alert recipient add my-alert value=otheruser@example.com id=my-alert-recipient2 meta timestamp-format=%c
13.1.6. アラート設定コマンドの例
- アラート ID の値が指定されていないため、
alertのアラート ID を作成します。 - 最初の受信者の作成コマンドは、
rec_valueの受信者を指定します。このコマンドには受信側 ID が指定されていないため、alert-recipientの値が受信側 ID として使用されます。 - 2 番目の受信者の作成コマンドは、
rec_value2の受信者を指定します。このコマンドは、宛先にmy-recipientの受信者 ID を指定します。
#pcs alert create path=/my/path#pcs alert recipient add alert value=rec_value#pcs alert recipient add alert value=rec_value2 id=my-recipient#pcs alert configAlerts: Alert: alert (path=/my/path) Recipients: Recipient: alert-recipient (value=rec_value) Recipient: my-recipient (value=rec_value2)
my-alert で、受信側の値は my-other-recipient です。受信側 ID が指定されていないため、受信側 ID は my-alert-recipient となっています。
#pcs alert create id=my-alert path=/path/to/script description=alert_description options option1=value1 opt=val meta timeout=50s timestamp-format="%H%B%S"#pcs alert recipient add my-alert value=my-other-recipient#pcs alertAlerts: Alert: alert (path=/my/path) Recipients: Recipient: alert-recipient (value=rec_value) Recipient: my-recipient (value=rec_value2) Alert: my-alert (path=/path/to/script) Description: alert_description Options: opt=val option1=value1 Meta options: timestamp-format=%H%B%S timeout=50s Recipients: Recipient: my-alert-recipient (value=my-other-recipient)
my-alert -recipient の アラート 値を変更します。
#pcs alert update my-alert options option1=newvalue1 meta timestamp-format="%H%M%S"#pcs alert recipient update my-alert-recipient options option1=new meta timeout=60s#pcs alertAlerts: Alert: alert (path=/my/path) Recipients: Recipient: alert-recipient (value=rec_value) Recipient: my-recipient (value=rec_value2) Alert: my-alert (path=/path/to/script) Description: alert_description Options: opt=val option1=newvalue1 Meta options: timestamp-format=%H%M%S timeout=50s Recipients: Recipient: my-alert-recipient (value=my-other-recipient) Options: option1=new Meta options: timeout=60s
my- alert -recipient を削除します。
#pcs alert recipient remove my-recipient#pcs alertAlerts: Alert: alert (path=/my/path) Recipients: Recipient: alert-recipient (value=rec_value) Alert: my-alert (path=/path/to/script) Description: alert_description Meta options: timestamp-format="%M%B%S" timeout=50s Meta options: m=newval meta-option1=2 Recipients: Recipient: my-alert-recipient (value=my-other-recipient) Options: option1=new Meta options: timeout=60s
myalert を削除します。
#pcs alert remove my-alert#pcs alertAlerts: Alert: alert (path=/my/path) Recipients: Recipient: alert-recipient (value=rec_value)
13.1.7. アラートエージェントの作成
表13.2 アラートエージェントに渡される環境変数
| 環境変数 | 説明 |
|---|---|
CRM_alert_kind
|
アラートの種類 (ノード、フェンス、またはリソース)
|
CRM_alert_version
|
アラートを送信する Pacemaker のバージョン
|
CRM_alert_recipient
|
設定された送信側
|
CRM_alert_node_sequence
|
アラートがローカルノードで発行されるたびに増加するシーケンス番号。これは、Pacemaker によりアラートが発行された順序を参照するのに使用できます。後で発生したイベントのアラートは、先に発生したイベントのアラートよりもシーケンス番号が大きくなります。この番号は、クラスター全体を対象とする番号ではないことに注意してください。
|
CRM_alert_timestamp
| timestamp-format メタオプションで指定された形式で、エージェントの実行前に作成されたタイムスタンプ。これにより、エージェントは、エージェント自体が呼び出されたタイミング (システムの負荷やその他の状況により遅延する可能性があります) に関係なく、信頼できる高精度のイベント発生時間を使用できます。
|
CRM_alert_node
|
影響を受けるノードの名前
|
CRM_alert_desc
|
イベントの詳細。ノードアラートの場合は、ノードの現在の状態 (番号または lost) になります。フェンスアラートの場合は、フェンス操作の要求元、ターゲット、フェンス操作のエラーコードなどを含む要求されたフェンス操作の概要になります。リソースアラートの場合、これは
CRM_alert_status と同等の文字列です。
|
CRM_alert_nodeid
|
状態が変更したノードの ID (ノードアラートの場合のみ提供)。
|
CRM_alert_task
|
要求されたフェンスまたはリソース操作 (フェンスおよびリソースアラートの場合のみ提供)。
|
CRM_alert_rc
|
フェンスまたはリソース操作の数値の戻りコード (フェンスおよびリソースアラートの場合のみ提供)。
|
CRM_alert_rsc
|
影響を受けるリソースの名前 (リソースアラートのみ)。
|
CRM_alert_interval
|
リソース操作の間隔 (リソースアラートのみ)
|
CRM_alert_target_rc
|
操作の予期される数値の戻りコード (リソースアラートのみ)。
|
CRM_alert_status
|
Pacemaker が、操作の結果を示すために使用する数値コード (リソースアラートのみ)。
|
- アラートエージェントは受信者なしで呼び出されることがあります (受信者が設定されていない場合)。したがって、エージェントは、このような状況では終了しかしない場合でも、この状態に対応できなければなりません。設定を段階的に変更し、後で受信側を追加することもできます。
- 1 つのアラートに複数の受信側が設定されると、アラートエージェントは受信側ごとに 1 回呼び出されます。エージェントが同時に実行できない場合は、受信側を 1 つのみ設定する必要があります。エージェントは、受信側をリストとして解釈することができます。
- クラスターイベントの発生時、すべてのアラートは別々のプロセスとして同時に発生します。設定されているアラートと受信者の数、およびアラートエージェント内で行われている内容に応じて、負荷が急激に増加する可能性があります。たとえば、リソースを大量に消費するアクションを直接実行するのではなく、別のインスタンスのキューに追加することで、これを考慮に入れるようにエージェントを作成できます。
- アラートエージェントは、最低限のパーミッションを持つ
haclusterユーザーとして実行されます。エージェントに追加の特権が必要な場合は、適切な特権を持つ別のユーザーとしてエージェントが必要なコマンドを実行できるように、sudo を設定することが推奨されます。 CRM_alert_timestamp(それらのコンテンツは、ユーザーが設定したtimestamp-formatで指定される)、CRM_alert_recipient、およびすべてのアラートオプションなど、ユーザーが設定したパラメーターを検証およびサニタイズすることに注意してください。これは、設定エラーから保護するために必要です。さらに、一部のユーザーがクラスターノードへのhacluster-level アクセスがなくても CIB を変更できる場合は、セキュリティー上の問題となる可能性があるため、コードの挿入の可能性を回避する必要があります。onfailパラメーターが fence に設定されている操作を持つリソースがクラスターに含まれる場合、障害発生時に複数のフェンス通知が発生します(このパラメーターが設定されているリソースごとに 1 つと、追加の通知 1 つが含まれます)。STONITH デーモンとcrmdデーモンの両方が通知を送信します。この場合、送信される通知の数に関係なく、Pacemaker は 1 つのフェンス操作のみを実際に実行します。
ocf:pacemaker:ClusterMon リソースで使用される外部スクリプトインターフェイスと後方互換性を持つように設計されています。この互換性を維持するために、アラートエージェントに渡される環境変数に CRM_notify_ および CRM_alert_ が追加されます。互換性違反の 1 つは、ClusterMon リソースが root ユーザーとして外部スクリプトを実行し、アラートエージェントは hacluster ユーザーとして実行されることです。ClusterMon によってトリガーされるスクリプトの設定については、「モニタリングのリソースを使ったイベント通知」 を参照してください。
13.2. モニタリングのリソースを使ったイベント通知
ocf:pacemaker:ClusterMon リソースはクラスターのステータスを監視し、各クラスターイベントでアラートをトリガーできます。このリソースは、crm_mon コマンドを一定間隔でバックグラウンドで実行します。
ClusterMon リソースの設定時に --watch-fencing オプションをコマンドに指定します。crm_mon コマンドはメンバーシップの問題を監視しませんが、フェンシングが開始され、そのノードに対して監視が開始されたときにメッセージが出力されます。これはメンバーがクラスターに参加したことを意味します。
ClusterMon リソース は外部プログラムを実行して、extra_options パラメーターを使用してクラスター通知を行うものを判別できます。表13.3「外部監視プログラムへ渡される環境変数」 は、発生したクラスターイベントのタイプを記述する、プログラムに渡される環境変数を一覧表示します。
表13.3 外部監視プログラムへ渡される環境変数
| 環境変数 | 説明 |
|---|---|
CRM_notify_recipient
|
リソース定義からの静的な外部受信側。
|
CRM_notify_node
|
状態が変更したノード。
|
CRM_notify_rsc
|
状態を変更したリソースの名前。
|
CRM_notify_task
|
状態が変更する原因となった操作。
|
CRM_notify_desc
|
状態が変更する原因となった操作 (該当の操作がある場合) のテキスト出力の関連エラーコード。
|
CRM_notify_rc
|
操作の戻りコード。
|
CRM_target_rc
|
操作の予期される戻りコード。
|
CRM_notify_status
|
操作の状態の数値表現。
|
ClusterMon リソースを設定します。このプログラムは指定されたイベント通知をログに記録します。
crm_logger.sh プログラムを作成します。
- クラスターのノードの 1 つで、イベント通知をログに記録するプログラムを作成します。
#
cat <<-END >/usr/local/bin/crm_logger.sh#!/bin/shlogger -t "ClusterMon-External" "${CRM_notify_node} ${CRM_notify_rsc}\${CRM_notify_task} ${CRM_notify_desc} ${CRM_notify_rc}\${CRM_notify_target_rc} ${CRM_notify_status} ${CRM_notify_recipient}";exit;END - プログラムの所有者とパーミッションを設定します。
#
chmod 700 /usr/local/bin/crm_logger.sh#chown root.root /usr/local/bin/crm_logger.sh - scp コマンドを使用して crm_logger.sh プログラムをクラスターの他のノードにコピーし、それらのノードの同じ場所にプログラムを配置し、プログラムに同じ所有者とパーミッションを設定します。
/usr/local/bin/crm_logger.sh を実行する ClusterMon -External という名前の ClusterMon リソースを設定します。ClusterMon リソースは、クラスターのステータスを html ファイル(この例では /var/www/html/cluster_mon.html )に出力します。pidfile は ClusterMon がすでに実行されているかどうかを検出します(この例では /var/run/crm_mon-external.pid ファイル)。このリソースはクローンとして作成されるため、クラスターの各ノードで実行されます。watch-fencing は、フェンスリソースの start/stop/monitor、start/monitor など、リソースイベントなどのフェンスイベントの監視を有効にするために指定されます。
#pcs resource create ClusterMon-External ClusterMon user=root\update=10 extra_options="-E /usr/local/bin/crm_logger.sh --watch-fencing"\htmlfile=/var/www/html/cluster_mon.html\pidfile=/var/run/crm_mon-external.pid clone
#/usr/sbin/crm_mon -p /var/run/crm_mon-manual.pid -d -i 5\-h /var/www/html/crm_mon-manual.html -E "/usr/local/bin/crm_logger.sh"\--watch-fencing
Aug 7 11:31:32 rh6node1pcmk ClusterMon-External: rh6node2pcmk.examplerh.com ClusterIP st_notify_fence Operation st_notify_fence requested by rh6node1pcmk.examplerh.com for peer rh6node2pcmk.examplerh.com: OK (ref=b206b618-e532-42a5-92eb-44d363ac848e) 0 0 0 #177 Aug 7 11:31:32 rh6node1pcmk ClusterMon-External: rh6node1pcmk.examplerh.com ClusterIP start OK 0 0 0 Aug 7 11:31:32 rh6node1pcmk ClusterMon-External: rh6node1pcmk.examplerh.com ClusterIP monitor OK 0 0 0 Aug 7 11:33:59 rh6node1pcmk ClusterMon-External: rh6node1pcmk.examplerh.com fence_xvms monitor OK 0 0 0 Aug 7 11:33:59 rh6node1pcmk ClusterMon-External: rh6node1pcmk.examplerh.com ClusterIP monitor OK 0 0 0 Aug 7 11:33:59 rh6node1pcmk ClusterMon-External: rh6node1pcmk.examplerh.com ClusterMon-External start OK 0 0 0 Aug 7 11:33:59 rh6node1pcmk ClusterMon-External: rh6node1pcmk.examplerh.com fence_xvms start OK 0 0 0 Aug 7 11:33:59 rh6node1pcmk ClusterMon-External: rh6node1pcmk.examplerh.com ClusterIP start OK 0 0 0 Aug 7 11:33:59 rh6node1pcmk ClusterMon-External: rh6node1pcmk.examplerh.com ClusterMon-External monitor OK 0 0 0 Aug 7 11:34:00 rh6node1pcmk crmd[2887]: notice: te_rsc_command: Initiating action 8: monitor ClusterMon-External:1_monitor_0 on rh6node2pcmk.examplerh.com Aug 7 11:34:00 rh6node1pcmk crmd[2887]: notice: te_rsc_command: Initiating action 16: start ClusterMon-External:1_start_0 on rh6node2pcmk.examplerh.com Aug 7 11:34:00 rh6node1pcmk ClusterMon-External: rh6node1pcmk.examplerh.com ClusterIP stop OK 0 0 0 Aug 7 11:34:00 rh6node1pcmk crmd[2887]: notice: te_rsc_command: Initiating action 15: monitor ClusterMon-External_monitor_10000 on rh6node2pcmk.examplerh.com Aug 7 11:34:00 rh6node1pcmk ClusterMon-External: rh6node2pcmk.examplerh.com ClusterMon-External start OK 0 0 0 Aug 7 11:34:00 rh6node1pcmk ClusterMon-External: rh6node2pcmk.examplerh.com ClusterMon-External monitor OK 0 0 0 Aug 7 11:34:00 rh6node1pcmk ClusterMon-External: rh6node2pcmk.examplerh.com ClusterIP start OK 0 0 0 Aug 7 11:34:00 rh6node1pcmk ClusterMon-External: rh6node2pcmk.examplerh.com ClusterIP monitor OK 0 0 0
第14章 Pacemaker を用いたマルチサイトクラスターの設定
- Cluster 1 は、ノード
cluster1-node1およびcluster1-node2で設定されます。 - Cluster 1 に割り当てられたフローティング IP アドレスは 192.168.11.100 です。
- Cluster 2 は、cluster2
-node1およびcluster2-node2 で設定されます。 - Cluster 2 に割り当てられたフローティング IP アドレスは 192.168.22.100 です。
- arbitrator ノードは、IP アドレスが 192.168.99.100 の
arbitrator-nodeです。 - この設定が使用する Booth チケットの名前は
apacheticketです。
apachegroup リソースグループの一部として設定されていることを前提としています。各クラスターの Pacemaker インスタンスは独立しているため、このリソースのチケット制約を設定するために、各クラスターでリソースとリソースグループが同じである必要はありませんが、これはフェイルオーバーの一般的な事例になります。
- 両方のクラスター
の各ノードに booth サイトの Booth チケットマネージャーパッケージをインストールします。[root@cluster1-node1 ~]#
yum install -y booth-site[root@cluster1-node2 ~]#yum install -y booth-site[root@cluster2-node1 ~]#yum install -y booth-site[root@cluster2-node2 ~]#yum install -y booth-site pcsパッケージ、booth-coreパッケージ、およびbooth-arbitratorパッケージを arbitrator ノードにインストールします。[root@arbitrator-node ~]#
yum install -y pcs booth-core booth-arbitrator- 9929/tcp ポートと 9929/udp ポートがすべてのクラスターノードと仲裁ノードで解放されていることを確認します。たとえば、両方のクラスターのすべてのノードと仲裁ノードで次のコマンドを実行すると、そのノードの 9929/tcp ポートおよび 9929/udp ポートにアクセスできます。
#
firewall-cmd --add-port=9929/udp#firewall-cmd --add-port=9929/tcp#firewall-cmd --add-port=9929/udp --permanent#firewall-cmd --add-port=9929/tcp --permanentこの手順自体により、任意のマシンがノード上の 9929 ポートにアクセスできることに注意してください。お使いのサイトで、ノードが必要なノードに対してのみ開いていることを確認する必要があります。 - 1 つのクラスターの 1 つのノードで Booth 設定を作成します。各クラスターおよび仲裁ノードに指定するアドレスは IP アドレスでなければなりません。各クラスターにはフローティング IP アドレスを指定します。
[cluster1-node1 ~] #
pcs booth setup sites 192.168.11.100 192.168.22.100 arbitrators 192.168.99.100このコマンドを実行すると、/etc/booth/booth.confおよび/etc/booth/booth.key設定ファイルがノードに作成されます。 - Booth 設定のチケットを作成します。このチケットは、このチケットがクラスターに付与された場合のみリソースの実行を許可するリソース抑制を定義するのに使用します。このフェイルオーバー設定手順は基本的な手順で、チケットを 1 つだけ使用します。各チケットが別の 1 つ以上のリソースに関連付けられる、より複雑な事例では追加のチケットを作成します。
[cluster1-node1 ~] #
pcs booth ticket add apacheticket - 現在のクラスターのすべてのノードに対して Booth 設定を同期します。
[cluster1-node1 ~] #
pcs booth sync - 仲裁ノードから、Booth 設定を仲裁者へプルします。これをまだ行っていない場合は、まず設定をプルするノードに
pcsを認証する必要があります。[arbitrator-node ~] #
pcs cluster auth cluster1-node1[arbitrator-node ~] #pcs booth pull cluster1-node1 - Booth 設定を別のクラスターにプルし、そのクラスターのすべてのノードを同期します。arbitrator ノードの場合と同様に、以前に行っていない場合は、最初に設定をプルするノードに
pcsを認証する必要があります。[cluster2-node1 ~] #
pcs cluster auth cluster1-node1[cluster2-node1 ~] #pcs booth pull cluster1-node1[cluster2-node1 ~] #pcs booth sync - 仲裁ノードで Booth を開始して有効にします。注記Booth はクラスターで Pacemaker リソースとして実行するため、クラスターのノードで Booth を手動で開始したり有効にしたりしないでください。
[arbitrator-node ~] #
pcs booth start[arbitrator-node ~] #pcs booth enable - Booth を設定し、両方のクラスターサイトでクラスターリソースとして実行されるようにします。
booth-ipおよびbooth-serviceをグループのメンバーとして持つリソースグループが作成されます。[cluster1-node1 ~] #
pcs booth create ip 192.168.11.100[cluster2-node1 ~] #pcs booth create ip 192.168.22.100 - 各クラスターに定義したリソースグループにチケット制約を追加します。
[cluster1-node1 ~] #
pcs constraint ticket add apacheticket apachegroup[cluster2-node1 ~] #pcs constraint ticket add apacheticket apachegroup次のコマンドを実行すると、現在設定されているチケット制約を表示できます。pcs constraint ticket [show]
- この設定用に作成したチケットを最初のクラスターに付与します。チケットを付与する前にチケット抑制を定義する必要はありません。最初にクラスターにチケットを許可した後、pcs booth ticket revoke コマンドを使用して手動で上書きしない限り、Booth はチケット管理を引き継ぎます。pcs booth 管理コマンドの詳細は、pcs booth コマンドの PCS ヘルプ画面 を参照してください。
[cluster1-node1 ~] #
pcs booth ticket grant apacheticket
付録A OCF 戻りコード
表A.1 クラスターが行う復旧タイプ
| タイプ | 説明 | クラスターが行った操作 |
|---|---|---|
|
軽度
|
一時的なエラーが発生しました。
|
リソースを再起動するか、新しい場所に移します。
|
|
重度
|
現在のノードに固有である可能性のある一時的ではないエラーが発生しました。
|
リソースを別の場所に移動し、現在のノードで再試行されないようにします。
|
|
致命的
|
すべてのクラスターノードに共有となる一時的でないエラーが発生しました (例: 指定された設定がよくありません)。
|
リソースを停止し、いかなるクラスターノードでも起動されないようにします。
|
れた戻り値でない場合に、失敗したと見なされることができます。
表A.2 OCF 戻りコード
| 戻りコード | OCF ラベル | 説明 | |||
|---|---|---|---|---|---|
|
0
| OCF_SUCCESS
|
| |||
|
1
| OCF_ERR_GENERIC
|
| |||
|
2
| OCF_ERR_ARGS
|
| |||
|
3
| OCF_ERR_UNIMPLEMENTED
|
| |||
|
4
| OCF_ERR_PERM
|
| |||
|
5
| OCF_ERR_INSTALLED
|
| |||
|
6
| OCF_ERR_CONFIGURED
|
| |||
|
7
| OCF_NOT_RUNNING
|
| |||
|
8
| OCF_RUNNING_MASTER
|
| |||
|
9
| OCF_FAILED_MASTER
|
| |||
|
その他
|
該当なし
|
カスタムエラーコード
|
付録B Red Hat Enterprise Linux 6 および Red Hat Enterprise Linux 7 でのクラスターの作成
rgmanager を使用して Red Hat Enterprise Linux 6 でクラスターを設定する場合とは異なる設定ツールが必要になります。「クラスター作成 - rgmanager と Pacemaker」 では、さまざまなクラスターコンポーネント間の設定の違いをまとめています。
B.1. クラスター作成 - rgmanager と Pacemaker
rgmanager を使用した場合と Red Hat Enterprise Linux 7 で Pacemaker を使用したクラスターのコンポーネントの設定方法を比較しています。
表B.1 gmanager と Pacemaker を使用した場合のクラスター設定に関する比較
| 設定コンポーネント | rgmanager | Pacemaker |
|---|---|---|
|
クラスター設定ファイル
|
各ノードのクラスター設定ファイルは、直接編集できる
cluster.conf ファイルです。それ以外の場合は、luci または ccs インターフェイスを使用してクラスター設定を定義します。
|
クラスターおよび Pacemaker の設定ファイルは
corosync.conf および cib.xml です。cib.xml ファイルは直接編集しないでください。代わりに pcs または pcsd インターフェイスを使用してください。
|
|
ネットワーク設定
|
クラスター設定前に IP アドレスおよび SSH を設定
|
クラスター設定前に IP アドレスおよび SSH を設定
|
|
クラスター設定ツール
| cluster.conf ファイルの手動編集で、ccci、ccs コマンド。
|
pcs または pcsd
|
|
インストール
| rgmanager をインストールします( ricci、luci、リソースおよびフェンシングエージェントを含むすべての依存関係をプルします)。必要に応じて lvm2-cluster と gfs2-utils をインストールします。
| pcs と必要なフェンシングエージェントをインストールします。必要に応じて lvm2-cluster と gfs2-utils をインストールします。
|
|
クラスターサービスの起動
|
次の手順でクラスターサービスを起動、有効にする
または、ccs --start を入力してクラスターサービスを開始および有効化することもできます。
|
次の手順でクラスターサービスを起動、有効にする
|
|
設定ツールへのアクセスの制御
|
luci の場合、root ユーザーまたは luci 権限を持つユーザーは luci にアクセスできます。すべてのアクセスには、
ノードの ラクショットパスワードが必要です。
|
pcsd gui では、共通のシステムユーザーであるユーザー
hacluster として認証する必要があります。root ユーザーは hacluster のパスワードを設定できます。
|
|
クラスター作成
|
クラスターに名前を付け、luci または ccs を使用してクラスターに追加するノードを定義するか、
cluster.conf ファイルを直接編集します。
|
pcs cluster setup コマンドまたは
pcsd Web UI を使用して、クラスターに名前を付け、ノードを含めます。pcs cluster node add コマンドまたは pcsd Web UI を使用すると、ノードを既存のクラスターに追加できます。
|
|
クラスター設定を全ノードに伝える
|
クラスターを luci で設定する場合、伝播は自動的に行われます。ccs で、
--sync オプションを使用します。cman_tool version -r コマンドを使用することもできます。
|
クラスターおよび Pacemaker 設定ファイル
corosync.conf および cib.xml は、クラスターの設定時またはノードまたはリソースの追加時に自動的に伝播されます。
|
|
グローバルのクラスタープロパティー
|
以下の機能は、Red Hat Enterprise Linux 6 の
rgmanager で対応しています。
* クラスターネットワーク内での IP マルチキャスティングに使用するマルチキャストアドレスの選択をシステム側で行うよう設定することが可能
* IP マルチキャスティングが利用できない場合に UDP Unicast トランスポートメカニズムが使用可能
* RRP プロトコルを使用したクラスター設定が可能
|
Red Hat Enterprise Linux 7 の Pacemaker はクラスターに対して以下の機能をサポートします。
* クラスターに
no-quorum-policy を設定し、クラスターにクォーラムがない場合のシステムの動作を指定できます。
* 設定可能な追加のクラスタープロパティーについては、表12.1「クラスターのプロパティー」 を参照してください。
|
|
ロギング
|
グローバルおよびデーモン固有のログ記録設定が可能
|
ログ記録を手動で設定する方法については、ファイル
/etc/sysconfig/pacemaker を参照してください。
|
|
クラスターの検証
|
クラスター検証は、クラスタースキーマを使用して luci および ccs で自動的に行われます。クラスターは起動時に自動的に検証されます。
|
クラスターは起動時に自動的に検証されるか、pcs cluster verify を使用してクラスターを検証できます。
|
|
2 ノードクラスターのクォーラム
|
2 ノードのクラスターの場合、システムによるクォーラムの決定方法を設定できます。
* クォーラムディスクの設定
* ccs を使用するか、
cluster.conf ファイルを編集して two_node=1 および expected_votes=1 を設定し、単一ノードがクォーラムを維持できるようにします。
|
pcs は、2 ノードクラスターに必要なオプションを
corosync に自動的に追加します。
|
|
クラスターの状態
|
luci では、クラスターの現在のステータスがインターフェイスのさまざまなコンポーネントに表示され、更新できます。ccs コマンドの
--getconf オプションを使用して、現在の設定ファイルを確認できます。clustat コマンドを使用して、クラスターのステータスを表示できます。
|
pcs status コマンドを使用すると、現在のクラスターのステータスを表示できます。
|
|
リソース
|
定義されたタイプのリソースを追加し、luci または ccs コマンドを使用するか、
cluster.conf 設定ファイルを編集してリソース固有のプロパティーを設定します。
|
pcs resource create コマンドまたは
pcsd Web UI を使用して、定義されたタイプのリソースを追加し、リソース固有のプロパティーを設定します。Pacemaker を使用してクラスターリソースを設定する方法は、6章クラスターリソースの設定 を参照してください。
|
|
リソースの動作、グループ化、起動と停止の順序
|
リソースの通信方法の設定にクラスターの サービス を定義
|
Pacemaker では、同時に配置され、順番に開始および停止される必要があるリソースのセットを定義する簡単な方法としてリソースグループを使用します。さらに、以下の方法でリソースの動作および対話方法を定義できます。
* リソース動作の一部はリソースオプションとして設定
* 場所の制約を使ってリソースを実行させるノードを指定
* 順序の制約を使ってリソースの実行順序を指定
コロケーション制約を使って任意のリソースの場所が別のリソースの場所に依存することを指定
これらのトピックの詳細については 6章クラスターリソースの設定 および 7章リソースの制約 を参照してください。
|
|
リソース管理: リソースの移動、起動、停止
|
luci を使用すると、クラスター、個別のクラスターノード、およびクラスターサービスを管理できます。ccs コマンドを使用すると、クラスターを管理できます。clusvadm を使用して、クラスターサービスを管理できます。
|
pcs cluster standby コマンドを使用して、ノードを一時的に無効にし、リソースをホストできないようにすることができます。これにより、リソースが移行されます。pcs resource disable コマンドを使用して、リソースを停止できます。
|
|
クラスターの設定を完全に削除
|
luci では、削除してクラスターを完全に削除するためにクラスター内のすべてのノードを選択できます。クラスターの各ノードから
cluster.conf を削除することもできます。
|
pcs cluster destroy コマンドを使用するとクラスター設定を削除できます。
|
|
複数のノードで実行中のリソース、複数モードで複数のノード上で実行中のリソース
|
該当なし。
|
Pacemaker ではリソースのクローンを作成し複数のノードで実行させることが可能で、作成したリソースのクローンをマスターリソースとスレーブリソースとして定義し複数のモードで実行させることが可能です。クローン作成したリソースおよびマスター/スレーブリソースに関する情報は、9章高度な設定 を参照してください。
|
|
フェンス機能 -- 1 ノードにつき 1 フェンス
|
フェンスデバイスをグローバルに作成するか、またはローカルに作成し、ノードに追加します。
post-fail delay と post-join delay の値を全体として定義できます。
|
pcs stonith create コマンドまたは
pcsd Web UI を使用して、各ノードにフェンスデバイスを作成します。複数のノードをフェンスできるデバイスでは、各ノードで個別に定義せずに 1 度に定義する必要があります。pcmk_host_map を定義して、1 つのコマンドで全ノードのフェンスデバイスを設定することもできます。pcmk_host_map の詳細は、表5.1「フェンスデバイスの一般的なプロパティー」 を参照してください。クラスターの stonith-timeout の値を全体として定義できます。
|
|
1 ノードごとに複数の (バックアップ) フェンスデバイス
|
luci または ccs コマンドを使用してバックアップデバイスを定義するか、
cluster.conf ファイルを直接編集します。
|
フェンスレベルを設定
|
B.2. Red Hat Enterprise Linux 6 および Red Hat Enterprise Linux 7 での Pacemaker のインストール
[root@rhel6]#yum install pacemaker cman pcs[root@rhel6]#chkconfig corosync off[root@rhel6]#chkconfig cman off
hacluster という名前の pcs 管理アカウントのパスワードを設定し、pcsd サービスを開始して有効にします。
[root@rhel6]#passwd hacluster[root@rhel6]#service pcsd start[root@rhel6]#chkconfig pcsd on
[root@rhel6]# pcs cluster auth [node] [...] [-u username] [-p password]hacluster という名前の pcs 管理アカウントのパスワードを設定し、pcsd サービスを起動および有効にします。
[root@rhel7]#yum install pcs pacemaker fence-agents-all[root@rhel7]#passwd hacluster[root@rhel7]#systemctl start pcsd.service[root@rhel7]#systemctl enable pcsd.service
[root@rhel7]# pcs cluster auth [node] [...] [-u username] [-p password]付録C 更新履歴
| 改訂履歴 | |||
|---|---|---|---|
| 改訂 8.1-1 | Fri Feb 28 2020 | ||
| |||
| 改訂 7.1-1 | Wed Aug 7 2019 | ||
| |||
| 改訂 6.1-1 | Thu Oct 4 2018 | ||
| |||
| 改訂 5.1-2 | Thu Mar 15 2018 | ||
| |||
| 改訂 5.1-0 | Thu Dec 14 2017 | ||
| |||
| 改訂 4.1-9 | Tue Oct 17 2017 | ||
| |||
| 改訂 4.1-5 | Wed Jul 19 2017 | ||
| |||
| 改訂 4.1-2 | Wed May 10 2017 | ||
| |||
| 改訂 3.1-10 | Tue May 2 2017 | ||
| |||
| 改訂 3.1-4 | Mon Oct 17 2016 | ||
| |||
| 改訂 3.1-3 | Wed Aug 17 2016 | ||
| |||
| 改訂 2.1-8 | Mon Nov 9 2015 | ||
| |||
| 改訂 2.1-5 | Mon Aug 24 2015 | ||
| |||
| 改訂 1.1-9 | Mon Feb 23 2015 | ||
| |||
| 改訂 1.1-7 | Thu Dec 11 2014 | ||
| |||
| 改訂 0.1-41 | Mon Jun 2 2014 | ||
| |||
| 改訂 0.1-2 | Thu May 16 2013 | ||
| |||
索引
シンボル
- アクション
- アクションプロパティー, リソースの動作
- オプション
- batch-limit, クラスタープロパティーとオプションの要約
- clone-max, クローンリソースの作成と削除
- clone-node-max, クローンリソースの作成と削除
- cluster-delay, クラスタープロパティーとオプションの要約
- cluster-infrastructure, クラスタープロパティーとオプションの要約
- cluster-recheck-interval, クラスタープロパティーとオプションの要約
- dampen, 接続状態変更によるリソースの移動
- dc-version, クラスタープロパティーとオプションの要約
- enable-acl, クラスタープロパティーとオプションの要約
- failure-timeout, リソースのメタオプション
- fence-reaction, クラスタープロパティーとオプションの要約
- globally-unique, クローンリソースの作成と削除
- host_list, 接続状態変更によるリソースの移動
- interleave, クローンリソースの作成と削除
- is-managed, リソースのメタオプション
- last-lrm-refresh, クラスタープロパティーとオプションの要約
- maintenance-mode, クラスタープロパティーとオプションの要約
- master-max, 多状態のリソース: 複数モードのリソース
- master-node-max, 多状態のリソース: 複数モードのリソース
- migration-limit, クラスタープロパティーとオプションの要約
- migration-threshold, リソースのメタオプション
- multiple-active, リソースのメタオプション
- multiplier, 接続状態変更によるリソースの移動
- no-quorum-policy, クラスタープロパティーとオプションの要約
- notify, クローンリソースの作成と削除
- ordered, クローンリソースの作成と削除
- pe-error-series-max, クラスタープロパティーとオプションの要約
- pe-input-series-max, クラスタープロパティーとオプションの要約
- pe-warn-series-max, クラスタープロパティーとオプションの要約
- placement-strategy, クラスタープロパティーとオプションの要約
- priority, リソースのメタオプション
- requires, リソースのメタオプション
- resource-stickiness, リソースのメタオプション
- shutdown-escalation, クラスタープロパティーとオプションの要約
- start-failure-is-fatal, クラスタープロパティーとオプションの要約
- stonith-action, クラスタープロパティーとオプションの要約
- stonith-enabled, クラスタープロパティーとオプションの要約
- stonith-timeout, クラスタープロパティーとオプションの要約
- stop-all-resources, クラスタープロパティーとオプションの要約
- stop-orphan-actions, クラスタープロパティーとオプションの要約
- stop-orphan-resources, クラスタープロパティーとオプションの要約
- symmetric-cluster, クラスタープロパティーとオプションの要約
- target-role, リソースのメタオプション
- オプションのクエリー, クラスタープロパティー設定のクエリー
- クエリー
- クラスターのプロパティー, クラスタープロパティー設定のクエリー
- クラスター
- オプション
- batch-limit, クラスタープロパティーとオプションの要約
- cluster-delay, クラスタープロパティーとオプションの要約
- cluster-infrastructure, クラスタープロパティーとオプションの要約
- cluster-recheck-interval, クラスタープロパティーとオプションの要約
- dc-version, クラスタープロパティーとオプションの要約
- enable-acl, クラスタープロパティーとオプションの要約
- fence-reaction, クラスタープロパティーとオプションの要約
- last-lrm-refresh, クラスタープロパティーとオプションの要約
- maintenance-mode, クラスタープロパティーとオプションの要約
- migration-limit, クラスタープロパティーとオプションの要約
- no-quorum-policy, クラスタープロパティーとオプションの要約
- pe-error-series-max, クラスタープロパティーとオプションの要約
- pe-input-series-max, クラスタープロパティーとオプションの要約
- pe-warn-series-max, クラスタープロパティーとオプションの要約
- placement-strategy, クラスタープロパティーとオプションの要約
- shutdown-escalation, クラスタープロパティーとオプションの要約
- start-failure-is-fatal, クラスタープロパティーとオプションの要約
- stonith-action, クラスタープロパティーとオプションの要約
- stonith-enabled, クラスタープロパティーとオプションの要約
- stonith-timeout, クラスタープロパティーとオプションの要約
- stop-all-resources, クラスタープロパティーとオプションの要約
- stop-orphan-actions, クラスタープロパティーとオプションの要約
- stop-orphan-resources, クラスタープロパティーとオプションの要約
- symmetric-cluster, クラスタープロパティーとオプションの要約
- プロパティーのクエリー, クラスタープロパティー設定のクエリー
- プロパティーの削除, クラスターのプロパティーの設定と削除
- プロパティーの設定, クラスターのプロパティーの設定と削除
- クラスターのステータス
- display, クラスターの状態表示
- クラスターのプロパティー, クラスターのプロパティーの設定と削除, クラスタープロパティー設定のクエリー
- クラスターオプション, クラスタープロパティーとオプションの要約
- クラスター管理
- ACPI の設定, 統合フェンスデバイスで使用する ACPI の設定
- クローン, リソースのクローン
- オプション
- clone-max, クローンリソースの作成と削除
- clone-node-max, クローンリソースの作成と削除
- globally-unique, クローンリソースの作成と削除
- interleave, クローンリソースの作成と削除
- notify, クローンリソースの作成と削除
- ordered, クローンリソースの作成と削除
- クローンオプション, クローンリソースの作成と削除
- グループ, リソースグループ, グループの Stickiness (粘着性)
- グループリソース, リソースグループ
- コロケーション, リソースのコロケーション
- プロパティー
- enabled, リソースの動作
- id, リソースのプロパティー, リソースの動作, 多状態のリソース: 複数モードのリソース
- interval, リソースの動作
- name, リソースの動作
- on-fail, リソースの動作
- provider, リソースのプロパティー
- standard, リソースのプロパティー
- timeout, リソースの動作
- type, リソースのプロパティー
- プロパティーの削除, クラスターのプロパティーの設定と削除
- プロパティーの設定, クラスターのプロパティーの設定と削除
- リソース, リソースのプロパティー, リソースを手作業で移動する
- cleanup, クラスターリソースのクリーンアップ
- オプション
- failure-timeout, リソースのメタオプション
- is-managed, リソースのメタオプション
- migration-threshold, リソースのメタオプション
- multiple-active, リソースのメタオプション
- priority, リソースのメタオプション
- requires, リソースのメタオプション
- resource-stickiness, リソースのメタオプション
- target-role, リソースのメタオプション
- クローン, リソースのクローン
- グループ, リソースグループ
- プロパティー
- id, リソースのプロパティー
- provider, リソースのプロパティー
- standard, リソースのプロパティー
- type, リソースのプロパティー
- 他のリソースに相対的となる場所, リソースのコロケーション
- 制約
- コロケーション, リソースのコロケーション
- ルール, Pacemaker ルール
- 属性式, ノード属性の式
- 日付/時刻の式, 時刻と日付ベースの式
- 日付の詳細, 日付の詳細
- 期間, 期間
- 順序, 順序の制約
- 場所
- ルールで確定, ルールを使用したリソースの場所の確定
- 多状態, 多状態のリソース: 複数モードのリソース
- 有効化, クラスターリソースの有効化と無効化
- 無効化, クラスターリソースの有効化と無効化
- 移動する, リソースを手作業で移動する
- 起動順序, 順序の制約
- リソースのクローン, リソースのクローン
- リソースの場所の確定, ルールを使用したリソースの場所の確定
- リソースオプション, リソースのメタオプション
- ルール, Pacemaker ルール
- boolean-op, Pacemaker ルール
- score, Pacemaker ルール
- score-attribute, Pacemaker ルール
- リソースの場所の確定, ルールを使用したリソースの場所の確定
- ロール, Pacemaker ルール
- ルールで確定, ルールを使用したリソースの場所の確定
- ロール, Pacemaker ルール
- 制約ルール, Pacemaker ルール
- 他のリソースに相対的となる場所, リソースのコロケーション
- 使用率属性, 使用と配置ストラテジー
- 制約
- コロケーション, リソースのコロケーション
- ルール, Pacemaker ルール
- boolean-op, Pacemaker ルール
- score, Pacemaker ルール
- score-attribute, Pacemaker ルール
- ロール, Pacemaker ルール
- 場所
- 属性式, ノード属性の式
- 日付/時刻の式, 時刻と日付ベースの式
- end, 時刻と日付ベースの式
- operation, 時刻と日付ベースの式
- start, 時刻と日付ベースの式
- 日付の詳細, 日付の詳細
- 期間, 期間
- 順序, 順序の制約
- 種類, 順序の制約
- 制約ルール, Pacemaker ルール
- 制約式, ノード属性の式, 時刻と日付ベースの式
- 削除中
- クラスターのプロパティー, クラスターのプロパティーの設定と削除
- 場所
- score, 基本的な場所の制約
- ルールで確定, ルールを使用したリソースの場所の確定
- 場所の制約, 基本的な場所の制約
- 多状態, 多状態のリソース: 複数モードのリソース, 多状態の粘着性 (Stickiness)
- 対称, 順序の制約
- 順序の制約, 順序の制約
- 属性式, ノード属性の式
- 新機能と変更点, 新機能と変更点
- 日付/時刻の式, 時刻と日付ベースの式
- end, 時刻と日付ベースの式
- operation, 時刻と日付ベースの式
- start, 時刻と日付ベースの式
- 日付の詳細, 日付の詳細
- 時間ベースの式, 時刻と日付ベースの式
- 有効化
- リソース, クラスターリソースの有効化と無効化
- 期間, 期間
- 概要
- 新機能と変更点, 新機能と変更点
- 無効化
- リソース, クラスターリソースの有効化と無効化
- 移動する, リソースを手作業で移動する
- リソース, リソースを手作業で移動する
- 種類, 順序の制約
- 順序の制約, 順序の制約
- 統合フェンスデバイス
- ACPI の設定, 統合フェンスデバイスで使用する ACPI の設定
- 設定
- クラスターのプロパティー, クラスターのプロパティーの設定と削除
- 起動順序, 順序の制約
- 配置ストラテジー, 使用と配置ストラテジー
- 順序
- 種類, 順序の制約
- 順序の制約, 順序の制約
- 対称, 順序の制約
- 順序付け, 順序の制約
- , クラスターの作成
B
- batch-limit, クラスタープロパティーとオプションの要約
- クラスターオプション, クラスタープロパティーとオプションの要約
- boolean-op, Pacemaker ルール
- 制約ルール, Pacemaker ルール
C
- clone-max, クローンリソースの作成と削除
- クローンオプション, クローンリソースの作成と削除
- clone-node-max, クローンリソースの作成と削除
- クローンオプション, クローンリソースの作成と削除
- cluster-delay, クラスタープロパティーとオプションの要約
- クラスターオプション, クラスタープロパティーとオプションの要約
- cluster-infrastructure, クラスタープロパティーとオプションの要約
- クラスターオプション, クラスタープロパティーとオプションの要約
- cluster-recheck-interval, クラスタープロパティーとオプションの要約
- クラスターオプション, クラスタープロパティーとオプションの要約
D
- dampen, 接続状態変更によるリソースの移動
- Ping リソースオプション, 接続状態変更によるリソースの移動
- dc-version, クラスタープロパティーとオプションの要約
- クラスターオプション, クラスタープロパティーとオプションの要約
E
- enable-acl, クラスタープロパティーとオプションの要約
- クラスターオプション, クラスタープロパティーとオプションの要約
- enabled, リソースの動作
- アクションプロパティー, リソースの動作
- end, 時刻と日付ベースの式
- 制約式, 時刻と日付ベースの式
F
- failure-timeout, リソースのメタオプション
- リソースオプション, リソースのメタオプション
- fence-reaction, クラスタープロパティーとオプションの要約
- クラスターオプション, クラスタープロパティーとオプションの要約
G
- globally-unique, クローンリソースの作成と削除
- クローンオプション, クローンリソースの作成と削除
H
- host_list, 接続状態変更によるリソースの移動
- Ping リソースオプション, 接続状態変更によるリソースの移動
- hours, 日付の詳細
- 日付の詳細, 日付の詳細
I
- id, リソースのプロパティー, リソースの動作, 日付の詳細
- Multi-State プロパティー, 多状態のリソース: 複数モードのリソース
- アクションプロパティー, リソースの動作
- リソース, リソースのプロパティー
- 場所の制約, 基本的な場所の制約
- 日付の詳細, 日付の詳細
- interleave, クローンリソースの作成と削除
- クローンオプション, クローンリソースの作成と削除
- interval, リソースの動作
- アクションプロパティー, リソースの動作
- is-managed, リソースのメタオプション
- リソースオプション, リソースのメタオプション
L
- last-lrm-refresh, クラスタープロパティーとオプションの要約
- クラスターオプション, クラスタープロパティーとオプションの要約
M
- maintenance-mode, クラスタープロパティーとオプションの要約
- クラスターオプション, クラスタープロパティーとオプションの要約
- master-max, 多状態のリソース: 複数モードのリソース
- Multi-State オプション, 多状態のリソース: 複数モードのリソース
- master-node-max, 多状態のリソース: 複数モードのリソース
- Multi-State オプション, 多状態のリソース: 複数モードのリソース
- migration-limit, クラスタープロパティーとオプションの要約
- クラスターオプション, クラスタープロパティーとオプションの要約
- migration-threshold, リソースのメタオプション
- リソースオプション, リソースのメタオプション
- monthdays, 日付の詳細
- 日付の詳細, 日付の詳細
- months, 日付の詳細
- 日付の詳細, 日付の詳細
- moon, 日付の詳細
- 日付の詳細, 日付の詳細
- Multi-State
- オプション
- master-max, 多状態のリソース: 複数モードのリソース
- master-node-max, 多状態のリソース: 複数モードのリソース
- プロパティー
- Multi-State オプション, 多状態のリソース: 複数モードのリソース
- Multi-State プロパティー, 多状態のリソース: 複数モードのリソース
- multiple-active, リソースのメタオプション
- リソースオプション, リソースのメタオプション
- multiplier, 接続状態変更によるリソースの移動
- Ping リソースオプション, 接続状態変更によるリソースの移動
N
- name, リソースの動作
- アクションプロパティー, リソースの動作
- no-quorum-policy, クラスタープロパティーとオプションの要約
- クラスターオプション, クラスタープロパティーとオプションの要約
- notify, クローンリソースの作成と削除
- クローンオプション, クローンリソースの作成と削除
O
- OCF
- 戻りコード, OCF 戻りコード
- on-fail, リソースの動作
- アクションプロパティー, リソースの動作
- operation, ノード属性の式, 時刻と日付ベースの式
- 制約式, ノード属性の式, 時刻と日付ベースの式
- ordered, クローンリソースの作成と削除
- クローンオプション, クローンリソースの作成と削除
P
- pe-error-series-max, クラスタープロパティーとオプションの要約
- クラスターオプション, クラスタープロパティーとオプションの要約
- pe-input-series-max, クラスタープロパティーとオプションの要約
- クラスターオプション, クラスタープロパティーとオプションの要約
- pe-warn-series-max, クラスタープロパティーとオプションの要約
- クラスターオプション, クラスタープロパティーとオプションの要約
- Ping リソース
- オプション
- dampen, 接続状態変更によるリソースの移動
- host_list, 接続状態変更によるリソースの移動
- multiplier, 接続状態変更によるリソースの移動
- Ping リソースオプション, 接続状態変更によるリソースの移動
- placement-strategy, クラスタープロパティーとオプションの要約
- クラスターオプション, クラスタープロパティーとオプションの要約
- priority, リソースのメタオプション
- リソースオプション, リソースのメタオプション
- provider, リソースのプロパティー
- リソース, リソースのプロパティー
R
- requires, リソースのメタオプション
- resource-stickiness, リソースのメタオプション
- Multi-State, 多状態の粘着性 (Stickiness)
- グループ, グループの Stickiness (粘着性)
- リソースオプション, リソースのメタオプション
S
- score, 基本的な場所の制約, Pacemaker ルール
- 制約ルール, Pacemaker ルール
- 場所の制約, 基本的な場所の制約
- score-attribute, Pacemaker ルール
- 制約ルール, Pacemaker ルール
- shutdown-escalation, クラスタープロパティーとオプションの要約
- クラスターオプション, クラスタープロパティーとオプションの要約
- standard, リソースのプロパティー
- リソース, リソースのプロパティー
- start, 時刻と日付ベースの式
- 制約式, 時刻と日付ベースの式
- start-failure-is-fatal, クラスタープロパティーとオプションの要約
- クラスターオプション, クラスタープロパティーとオプションの要約
- status
- display, クラスターの状態表示
- stonith-action, クラスタープロパティーとオプションの要約
- クラスターオプション, クラスタープロパティーとオプションの要約
- stonith-enabled, クラスタープロパティーとオプションの要約
- クラスターオプション, クラスタープロパティーとオプションの要約
- stonith-timeout, クラスタープロパティーとオプションの要約
- クラスターオプション, クラスタープロパティーとオプションの要約
- stop-all-resources, クラスタープロパティーとオプションの要約
- クラスターオプション, クラスタープロパティーとオプションの要約
- stop-orphan-actions, クラスタープロパティーとオプションの要約
- クラスターオプション, クラスタープロパティーとオプションの要約
- stop-orphan-resources, クラスタープロパティーとオプションの要約
- クラスターオプション, クラスタープロパティーとオプションの要約
- symmetric-cluster, クラスタープロパティーとオプションの要約
- クラスターオプション, クラスタープロパティーとオプションの要約
T
- target-role, リソースのメタオプション
- リソースオプション, リソースのメタオプション
- timeout, リソースの動作
- アクションプロパティー, リソースの動作
- type, リソースのプロパティー, ノード属性の式
- リソース, リソースのプロパティー
- 制約式, ノード属性の式